
基于BP神经网络的车辆换道时间预测
2020-12-07 06:12杨文忠梁凡李东昊杨蒙蒙富雅玲
现代电子技术 2020年21期
杨文忠 梁凡 李东昊 杨蒙蒙 富雅玲
摘 要: 为了减少交通事故,以车联网环境下智能车辆的换道时间为研究对象,提出一种新的提高换道安全性的方法,在换道前对车辆的换道时间进行预测,根据预测的换道时间判断能否安全换道。使用博洛尼亚数据集做测试,通过BP神经网络的学习方式对训练数据集进行学习,最终得到基于车辆在换道前一时刻沿当前车道的行驶速度(竖直速度),换道前一时刻车辆沿目标车道运行的速度(水平速度)和车辆换道时间的BP神经网络模型,最后使用验证集对建立的模型进行验证。验证结果表明,基于BP神经网络的车辆换道时间预测的准确率良好。在实际生活场景中,只需在车辆上安装车速传感器就可以将建立的模型应用到实际中,因此该模型具有较高的现实意义。
关键词: 物联网; 车联网; 交通安全; 换道安全; BP神经网络; 换道时间
中图分类号: TN911.1?34; TP391 文献标识码: A 文章编号: 1004?373X(2020)21?0085?04
Lane change duration prediction based on BP neural network
YANG Wenzhong, LIANG Fan, LI Donghao, YANG Mengmeng, FU Yaling
(College of Information Science and Engineering, Xinjiang University, Urumqi 830046, China)
Abstract: A new method is proposed to improve the lane change safety by taking lane change duration of intelligent vehicles in the context of the Internet of Vehicles as the research object to reduce traffic accidents. In this method, the lane change duration of vehicles is forecasted before lane change, and whether it is safe to change lanes or not is judged according to the predicted lane change duration. Bologna data set is used as a test, and the training data set is learned by BP neural network to obtain a BP neural network model based on the vehicle speed (vertical speed) traveling along the current lane before lane change, the vehicle speed (horizontal speed) traveling along the target lane before lane change and the duration of vehicle changing lanes. Finally, validation sets are used to verify the established model. The results show that the prediction accuracy of vehicle lane change duration based on BP neural network is high. In the real life, the established model can be applied to practice simply by installing a speed sensor on the vehicle, so the model has a high practical significance.
Keywords: Internet of Things; Internet of Vehicles; traffic safety; safety of lane change; BP neural network; lane change duration
0 引 言
汽車在行驶过程中,出于各种各样的原因,会发生换道行为。如果换道时机不对,很可能会引发交通事故,加剧交通堵塞,影响人们出行。因此,如果在换道前对换道时间进行预测,那么预测结果就可辅助驾驶员判断是否进行换道,提高换道安全性,从而有效避免交通事故的产生,预防道路堵塞。
为了提高车辆换道安全性,国内外学者研究开发了许多基于机器学习的换道辅助系统来辅助驾驶员决定是否进行换道。如文献[1]通过驾驶模拟器的实验来采集交通流数据,所收集的速度、距离、车道指示和限速等交通流数据作为传统BP神经网络的输入变量,来预测车辆的换道意图;文献[2?3]给定与车辆换道有关的相关特征作为输入,车辆的变道意图作为输出,采用分类器逻辑回归[2]和SVM[3]训练车辆换道意图识别模型以获得最佳预测结果;文献[4]使用贝叶斯分类器和决策树对强制变道进行建模,开发出一种变道辅助系统,该系统为驾驶员在停车时强制改道提供安全间隙的建议。
在车辆换道特征方面:文献[5?6]提出了基于车辆速度的智能交通辅助系统,用于在动态机动模型中帮助司机安全有效的进行变道。文献[7]通过从驾驶员开始改变车道的距离间隙不确定性的分类入手,研究了距离间隙对换车道时驾驶员不确定性的影响,从而开发出可靠的驾驶员辅助系统。文献[8]通过确定不同级别预警规则的即将碰撞时间(TTC)阈值,研究出合理的换道预警参数来提高换道的安全性。文献[9?10]通过融合驾驶情况、驾驶员行为、车辆运动等特征,使用神经网络对车辆换道意图进行识别来提高车辆的换道安全性。文献[11]通过计算主车辆与周围车辆之间的最小安全距离来分析车道变换的风险来提高换道安全性。文献[12?13]采用紧急制动和车道变换来改善复杂交通下的驾驶任务,将纵向控制策略用于紧急制动,而横向控制策略用于换道,形成可避免交通冲突的换道轨迹,以此提高换道安全性。
但是很少考虑到换道时间对换道安全性的影响。从理论上讲,在实际的换道过程中,换道时间过快会使其他障碍车辆来不及反应,容易发生事故;换道时间过慢又会导致长时间占用两个车道,使发生事故的概率变高。因此本文提出建立一种基于BP神经网络的模型对车辆的安全换道时间进行预测,通过对换道时间的预测使驾驶员在换道前根据预测的换道时间判断能否安全换道,最终决定要不要换道,以此来提高车辆的换道安全性。以往的换道研究大都是假设换道的水平距离为一个车道的情况下实现,本文研究包含了所有可能换道长度的距离,可以很好地反映真实的车辆换道情况。
1 数据介绍
本文用于构建安全车辆换道模型的车辆数据轨迹点来自于博洛尼亚道路数据集的80万车辆轨迹点[14?15]。博洛尼亚道路数据集中记录了博洛尼亚城市某一天早上2 h的车辆行驶数据。数据集包含16 112辆车在博洛尼亚道路上某一时刻的水平方向坐标值和竖直方向坐标值,还记录了每一个轨迹点的产生时刻和瞬时行驶速度等。在16 112辆车一共799 112万个数据点中甄选出轨迹数据点信息最多的1 000辆车,将这些轨迹点按照车辆ID分为1 000组,每组代表一辆车的轨迹,使用Python画图软件画出每一辆车的行驶轨迹,最终统计出893次换道行为,并记录车辆的换道信息。
2 换道过程特性分析
2.1 换道行为的产生
意识决定行为,换道行为的产生会受到换道意图的影响。有时,在不违反交通规则的情况下,驾驶员为了保持正确的路线行驶,为了在期望的速度下行驶,或者为了行驶到更平坦广阔的路面,会在行驶过程中产生换道意图。根据驾驶员的换道意图,通常将换道行为分为强制性变换车道和选择性变换车道。选择性变换车道指的是在行驶过程中,高速行驶的车辆为了超越前方的慢速车辆,驾驶员根据自身的行车习惯或者为了避免车辆驶入堵塞道路进行的换道行为。强制性变换车道是指在行驶过程中由于道路受阻、路口转弯、匝道的分流、合流等因素,驾驶员不得不采取的换道行为。
2.2 换道方向位移分析
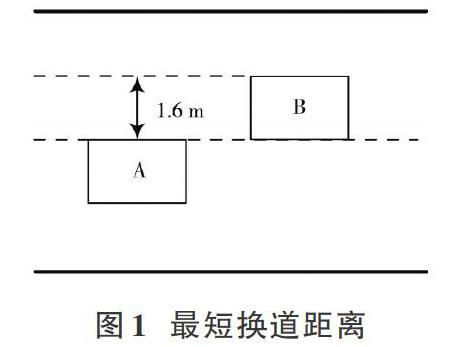
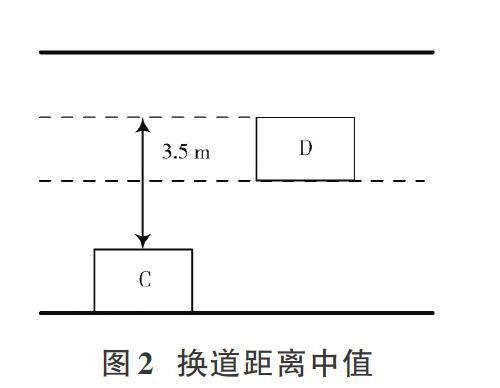
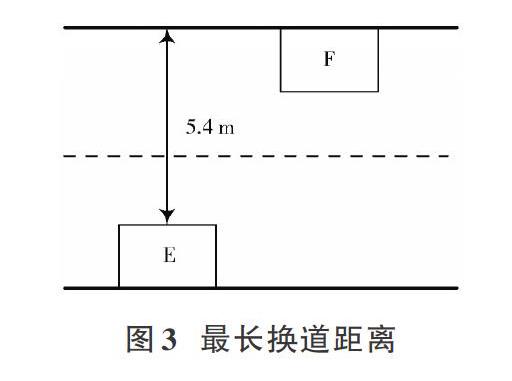
公共道路单车道寬度的标准是3.5 m,本文采用智能车辆模型的宽度为1.6 m,如果车辆的换道行为是从如图1所示的A位置开始换道,车辆移动到B位置结束换道,那么该车辆沿换道方向的位移为1.6 m;如果车辆的换道行为是从如图2所示的C位置开始换道,车辆移动到D位置结束换道,那么该车辆沿换道方向的位移为3.5 m;如果车辆的换道行为是从如图3所示的E位置开始换道,车辆移动到F位置结束换道,那么该车辆沿换道方向的位移为5.4 m。因此,车辆完成一次换道行为所移动的最小水平距离为1.6 m,如图1所示,最大距离为5.4 m,如图3所示。
3 车辆换道时间预测模型
3.1 变量选取及数据处理
车辆在变换车道时,影响车辆换道时间的因素有很多,但是本文建立的模型是在理想情况下,即不考虑公共道路的平坦状况和交通拥堵状况等因素,只考虑车辆换道前沿当前车道的行驶速度(竖直速度)和换道前一时刻车辆沿目标车道运行速度(水平速度)对车辆换道时间的影响。因此,此次实验选取输入变量为车辆在换道前一时刻的竖直速度和水平速度,输出变量为车辆的换道时间,以此构建基于BP神经网络的车辆换道时间预测模型。模型的输入、输出变量定义如下:New_id为新车辆编号;[H]为车辆在换道前一时刻的竖直速度;[V]为车辆在换道前一时刻水平速度;C_time为换道时间。
将数据集随机划分,选其中80%作为训练数据集,剩余的20%作为验证数据集。
3.2 BP网络学习方式
BP网络的学习过程实际上是用训练样本对网络进行训练的过程。网络的训练可以有两种方式,一种是顺序方式,另一种是批处理方式。所谓顺序方式,是指每输入一个训练样本,就根据该样本所产生的误差对网络的权值和阈值进行修改。所谓批处理方式,是指将样本集中的所有训练样本都一次性地全部输入网络后,再针对总的平均误差[E]修改网络的联结权值和阈值。由于顺序方式所需的临时存储空间较小,且可在一定程度上避免局部极小值现象。因此本次模型的构建采用顺序学习方式。
3.3 模型的建立
包含一个隐含层的BP神经网络可以逼近任何一个闭区间内的连续函数,完成任意大小的[n]维到[L]维的映射,因此本文建立了一个3层的BP神经网络,即该BP神经网络模型包含1个输入层、1个隐含层和1个输出层。本文将车辆在换道前一时刻的竖直速度和换道前一时刻水平速度作为输入向量输入,再加上输入层阈值,该模型的输入向量有3个,将车辆换道过程中所用的时间作为输出层的输出向量,因此输出层节点数为1,输出向量只有1个。
采用文献[16]研究出的最佳隐含层节点数的确定方法得出采用具有4个节点(包含隐含层阈值)的单隐含层(其中节点0表示隐含层阈值)构建模型的效果最好,因此本次模型的隐含层节点个数为4。基于Nguyen?Widrow算法对BP神经网络权值和阈值进行初始化,能够有效提高BP神经网络模型的预测精度。所以本文BP神经网络模型的权值和阈值采用Nguyen?Widrow算法进行初始化,隐含层和输出层的阈值初始值都设为0。网络结构示意图如图4所示。
在图4的BP网络[17]中,[i,j]分别表示输入层、隐含层、输出层的某个节点,[n,m]分别表示输入层、隐含层的节点数。
对输入层节点[i]有:
[xi, i=0,1,2] (1)
对隐含层节点[j]有:
[hj=i=1nwijxi, j=0,1,2,3] (2)
对输出层节点有:
[y=j=0mvjhj=j=0mi=0nvjwijxi] (3)
BP网络的学习过程实际上就是对网络联结权值和阈值的调整过程,利用给定的传播公式,沿着误差减小的方向不断调整网络联结权重和阈值。在BP学习算法中,对樣本集中的第[r]个样本,其输出层节点的期望输出用[dr]表示,实际输出用[yr]表示。其中,[dr]是已知的车辆换道时间,[yr]则由式(3)计算得出。如果只是针对一个样本,实际输出与期望输出的误差定义为:
[Er=12(dr-yr)2] (4)
学习过程中,其联结权值的调整变量为对[vj]的调整:
[Δvrj=η?Er?vj=-η(dr-yr)?hj] (5)
对[wij]的调整:
[Δwrij=η?Er?vj??vj?wij=-η(dr-yr)?vj?xi] (6)
联结权值的调整公式为:
[v(r+1)j=vrj+Δvrj] (7)
[w(r+1)ij=wrij+Δwrij] (8)
式中:[vrj]和[v(r+1)j]分别是第[r]次和第[r+1]次迭代时,从隐含层节点[j]到输出节点的联结权值;[Δvrj]是联结权值的变化量。[wrij]和[w(r+1)ij]分别是第[r]次和第[r+1]次迭代时,从输入层节点[i]到隐含层节点[j]的联结权值,[Δwrij]是联结权值的变化量。[η]为一个增益因子,取[0,1]区间的一个正数,这里取[η=0.001]。本次学习的训练过程就是重复上述的调整过程,迭代多次。
4 模型的实现及验证
基于BP神经网络的车辆换道时间预测模型在PyTorch的深度学习框架训练完成,为了寻找最好的收敛效果,设置了不同的隐含层节点数对网络进行训练,然后将验证集数据代入训练模型对车辆换道时间的准确率进行验证,记录不同隐含层节点数训练出来的模型进行预测的准确率。表1是设置不同隐含层节点数得到的模型预测的准确率。
由表1可得,在误差范围为[±0.1]的情况下得到该模型预测的最高准确率为91.62%,证明此次建立的车辆换道时间预测模型具有良好的预测能力。表2,表3是当隐含层节点数为4个时,训练网络各参数收敛后的结果。
为验证本文训练出的模型对车辆换道时间的预测性能,本文还使用相同的训练集和验证集对经典的回归机器学习算法K?Nearest Neighbors(KNN),Logistic Regression(LR),Decision Tree Regression(DTR)和Support Vector Regression(SVR)的训练结果做了对比,如表4所示。
对比表4中的实验结果发现,本文提出的基于BP神经网络的车辆换道时间预测模型的性能要好于大多数回归的机器学习算法,这说明在对车辆的换道时间做预测时,BP神经网络算法有较好的效果。
5 结 语
本文提出了一种新的提高换道安全性的方法,通过对换道时间的预测使驾驶员在换道前根据预测的换道时间来判断能否安全换道,最终决定是否要换道。从而提高换道安全性。但是本文模型的建立也存在一些缺陷,那就是考虑到的因素不够全面。今后继续进行此方向的研究,完善这方面的理论知识。
该研究模型不仅能在一定程度上提高车辆换道安全性,而且随着现在社会发展水平的提高,人们越来越重视时间,如果能够对换道时间做准确的预测,那么各种地图软件就可以提供给用户更精确的时间预测结果,提升用户体验。
注:本文通讯作者为梁凡。
参考文献
[1] LIU Meiyu, SHI Jing. A cellular automata traffic flow model combined with a BP neural network based microscopic lane changing decision model [J]. Journal of intelligent transportation systems, 2019, 23(4): 309?318.
[2] OH C, CHOI J, PARK S. In?depth understanding of lane changing interactions for in?vehicle driving assistance systems [J]. International journal of automotive technology, 2017, 18(2): 357?363.
[3] DOU Yangliu, YAN Fengjun, FENG Dawei. Lane changing prediction at highway lane drops using support vector machine and artificial neural network classifiers [C]// IEEE International Conference on Advanced Intelligent Mechatronics. Banff, AB, Canada: IEEE, 2016: 901?906.
[4] HOU Yi, EDARA P, SUN C. Modeling mandatory lane chan?ging using bayes classifier and decision trees [J]. IEEE transactions on intelligent transportation systems, 2014, 15(2): 647?655.
[5] JOSHI J, SINGH A, MOITRA L G, et al. DASITS: driver assistance system in intelligent transport system [C]// 2016 30th International Conference on Advanced Information Networking & Applications Workshops. Crans?Montana, Switzerland: IEEE, 2016: 545?550.
[6] YOUNES M B, BOUKERCHE A. A vehicular network based intelligent lane change assistance protocol for highways [C]// IEEE International Conference on Communications. Paris, France: IEEE, 2017: 1?6.
[7] YAN Fei, WEBER L, LUEDTKE A. Classifying driver′s uncertainty about the distance gap at lane changing for developing trustworthy assistance systems [C]// Intelligent Vehicles Symposium. Seoul, South Korea: IEEE, 2015: 1276?1281.
[8] 王畅,付锐,张琼,等.换道预警系统中参数TTC特性研究[J].中国公路学报,2015,28(8):91?100.
[9] LEONHARDT V, WANIELIK G. Recognition of lane change intentions fusing features of driving situation, driver behavior, and vehicle movement by means of neural networks [M]// ZACH?US C, M?LLER B, MEYER G. Advanced Microsystems for Automotive Applications 2017. Switzerland: Springer, 2018.
[10] ZHANG Yihuan, LIN Qin, WANG Jun, et al. Lane?change intention estimation for car?following control in autonomous driving [J]. IEEE transactions on intelligent vehicles, 2018, 3(3): 276?286.
[11] DANG Ruina, WANG Jianqiang, LI S E, et al. Coordinated adaptive cruise control system with lane?change assistance [J]. IEEE transactions on intelligent transportation systems, 2015, 16(5): 2373?2383.
[12] 朱艳玲,陈家琪.基于鱼群效应的车辆交叉换道最小安全距离研究[J].软件导刊,2018,17(3):23?27.
[13] WOO H, JI Y, KONO H, et al. Lane?change detection based on vehicle?trajectory prediction [J]. IEEE robotics & automation letters, 2017, 2(2): 1109?1116.
[14] 李玮,王晶,段建民.基于多项式的智能车辆换道轨迹规划[J].计算机工程与应用,2012,48(3):242?245.
[15] BEDOGNI L, GRAMAGLIA M, VESCO A, et al. The Bologna ringway dataset: improving road network conversion in SUMO and validating urban mobility via navigation services [J]. IEEE transactions on vehicular technology, 2015, 64(12): 5464?5476.
[16] CAIATI V, BEDOGNI L, BONONI L, et al. Estimating urban mobility with open data: a case study in Bologna [C]// Proceedings of the 2016 IEEE International Smart Cities Conference. Trento, Italy: IEEE, 2016: 1?8.
[17] 王嵘冰,徐红艳,李波,等.BP神经网络隐含层节点数确定方法研究[J].计算机技术与发展,2018,28(4):31?35.
作者简介:杨文忠(1971—),男,河南南阳人,博士,副教授,CCF会员(25451M),研究领域为物联网、舆情分析。
梁 凡(1993—),女,陕西西安人,硕士研究生,研究领域为交通安全。
李东昊(1994—),男,新疆乌鲁木齐人,硕士研究生,研究领域为事件检测。
杨蒙蒙(1994—),女,新疆阿克苏人,硕士研究生,研究领域为突发事件预测。
富雅玲(1993—),女,新疆乌鲁木齐人,硕士研究生,研究领域为交通事故突发事件检测。
猜你喜欢
中国广播(2016年11期)2016-12-26
青春岁月(2016年22期)2016-12-23
青春岁月(2016年22期)2016-12-23
中国高新技术企业(2016年31期)2016-12-22
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07
科技视界(2016年20期)2016-09-29
商(2016年8期)2016-04-08
