
基于三维激光扫描的轨道交通桥梁墩柱水平位移自动监测方法
2023-03-09 07:05赵栋
北京测绘 2023年8期
赵 栋
(中材地质工程勘查研究院有限公司,北京 100102)
0 引言
随着现代化社会的飞速发展,国内建筑工程项目数量与日俱增,规模也越来越大,因此,对于建筑项目的安全成为人们重点关注的问题。由于高速公路和铁路等轨道交通工程项目在建设中,存在大量的桥梁建设工程,而桥梁墩柱在地震或风崩等自然灾害发生时,会承受巨大的力量,导致其发生一定程度的位移。此外,人为因素如过载、施工不当等也可能引起桥梁桥墩的位移。如果桥梁墩柱的位移超过了规定的安全范围,可能会导致结构安全受损,甚至威胁到行车的安全[1]。同样也会使得桥梁的维护成本和维护周期增加。因此,需要对桥梁墩柱的位移情况进行监测。
有研究学者采用全球导航卫星系统(globalnavigation satellite system,GNSS)和全站仪自由测站相结合的方法,对跨海大桥桥墩水平位移进行监测。使用GNSS定位方法,布设方便联测的工作基点,使用平差软件对测量数据进行处理,计算监测点对应坐标的误差,实现跨海大桥桥墩水平位移的精准监测[2]。还有学者在综合考虑监测周期、现场条件之后,建立了针对桥梁高墩墩顶位移的监测系统,采用位移传感器对主梁和桥墩柱位移情况进行监测[3]。但是上述方法容易受到监测环境的影响,降低了监测的精准度,影响最终的监测结果。
三维激光扫描技术采用非接触式的测量方式,跨越各种障碍物进行测量,可以有效避免传统测量方法中出现的死角和盲区,采集到的三维数据可以通过现代化的计算机软件进行处理和分析,能够以极高的分辨率获取桥梁结构的三维模型,具有高精度的测量能力,可以实现对桥梁墩柱位移的有效监测。将三维激光扫描技术应用与轨道交通桥梁墩柱的位移监测中,根据试验区边坡地质条件及自动化仪器的设置,仔细规划扫描过程,提升了扫描的实时性与可靠性,结合误差反应结果能够及时监测边坡位移变化的情况。
因此,为了解决现有监测方法存在的不足,本文采用三维激光扫描技术,对轨道交通桥梁墩柱水平位移自动监测方法展开研究。
1 轨道交通桥梁墩柱水平位移自动监测
1.1 三维激光扫描桥梁墩柱预留变形
三维激光扫描通过激光发射装置将激光发射至被测物体表面,计算返回激光从发射点到返回后的时间长短,得到对应距离为S,在测距过程汇总扫描仪对目标点水平与垂直的夹角进行高速旋转,根据测量点的位置坐标p(x,y,z)形成目标空间密集点云数据。使用三维激光扫描设备采集点云数据,并运用摄像机拍摄被测目标的影像数据,将得到的影像数据进行数字化处理。对该工程桥墩K0+013.800~K0+046.800段进行水平位移监测,在桥梁施工中,桥墩开挖后处于临空状态,运用三维激光扫描可以获得断面与设计断面套合,得到初始净空值为b0,数据采集过程中按照桥墩水平位移量监测随时控制监测频率。在测试站点布置两个反射装置,将两个反射装置沿着桥梁墩柱纵向放置,并位于监测设备9~12 m处。两个反射装置分别摆放在对应位置,并使得两个装置之间存在一定的高度差[4]。运用测量仪器测量反射装置的中心点坐标,有利于工程坐标转换。计算两组点云数据之间的相邻点距离,对变形程度进行分析。设定邻近点a与b,两个点之间的距离为l。设定s为距离l的参照面,在s1中寻找距离s2最近的点并计算两点之间的距离。两组点云数据变形公式为
(1)
式中,ai为参照点云数据s1中的任意点;bi为邻近点。l2在一般情况下准确程度与s1和s2的粗糙程度和点密度有关。点云拼接的精度可以通过独立的控制点或者通过没有参加拼接运算的参考平面进行检校。不同方向的拼接误差是不同的,如果拼接时三维的约束存在不均匀情况,则无法在空间内均匀分布,因此可能导致一组点云数据中出现部分点云数据拼接精度较低的情况[5]。由于点云数据的粗糙度和扫描仪本身的点位置不确定性,会导致在两次扫描获取的点云数据中,同一位置上的点较难被准确识别为同一个点。由此可能导致即使表面在两次监测中未发生变化,但依旧会使表面出现一些视觉变化。为了消除粗糙度的影响,需设立置信区间,提高点云拼接精度。
1.2 全息位移自动化监测
当存在真正变形的时候,封闭的模型会发生改变,可通过对模型的识别来确定变化的范围[6]。点云粗糙度是指散乱点云数据中散乱点到表面模型距离的标准中误差,其中表面模型一般指局部表面模型,也可以通过连续窗口中坡度的变化来衡量。散乱点集η中点云数据粗糙程度的计算公式为
(2)
式中,g为点云数据粗糙程度;n为点云数据中的点个数;d为点到模型表面的距离。提升点云粗糙度,位移监测精度会随之提升。利用三维空间格网对点云进行分割,在不同区域内建立表面模型,计算散乱点云数据中每个点到模型的正交距离,参考面方程表达式为
z=β0+β1x+β2y
(3)
式中,x,y和z为空间点坐标;β为参考面函数参数;确定平面后转换所有数据的向量值,使得网格中所有的数据点基准面是相同的[7]。计算转换后的向量投影到平面的法向量值,得到网格内的点到平面的正交距离后,计算点云的粗糙度公式为
(4)

2 实验测试与分析
2.1 工程概况
熙江路拟建道路路幅宽为12 m,设计速度20 km/h。该道路全线进入轨道交通二号线大江~鱼洞站高架区间轨道控制保护区范围内。该道路位于轨道二号线高架区间北侧,道路走向与轨道线路平行。熙江路对轨道交通的外部作业影响等级为一级。K0+013.800~K0+046.800段为路基挖方段,最大挖方高度约6l.7 m,边坡采用桩板挡墙支护。K0+046.800~K0+115.300段为路基挖方段,最大挖方高度约3 m,边坡采用重力式挡墙支护。K0+115.300~K0+170.550段为零填零挖段。K0+170.550~K0+233.600段为路基填方段,最大填方高度约1.9 m,边坡采用1∶1.5自然放坡。K0+233.600~K0+418.400段为路基填方段,最大填方高度为6.3 m,边坡采用桩板挡墙支护。K0+418.400~终点段除终点设置格构护坡,其余为零填零挖。熙江路边坡安全等级为一级,采用抗滑桩+地基处理+重力式挡墙+坡率法放坡(格构植草护坡)+截排水工程进行综合治理。
2.2 搭建实验环境
在试验区中,设定进行三次连续的三维扫描[10-11]。采集实验区域所有数据,获得墩柱点云数据。测站A设定坐标为X1=0.000 m,Y1=0.000 m,Z1=0.000 m。测站B设定坐标为X2=456.92 m,Y2=-475.21 m,Z2=35.23 m。将每次扫描的数据合成为一组数据。选用U-Bcm系列地面三维激光扫描仪。每次进行扫描工作时,要将扫描设备放置在固定的三脚支架上,随后再完成对中改变,最后对扫描设备完成设置,将扫描头瞄准需要扫描的桥墩位置。扫描设备通过电线连接到主机端,形成采集与扫描数据连接网。其中,扫描设备需要监测的项目及工作量如表1所示。
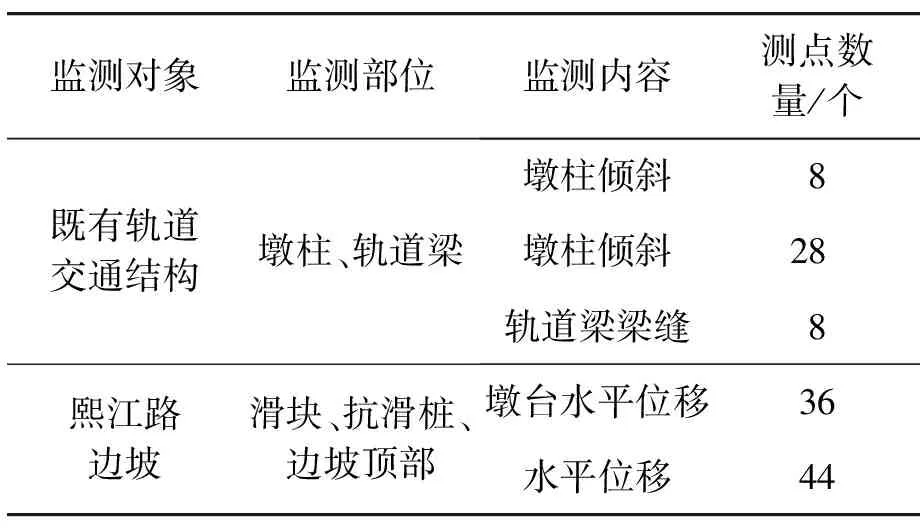
表1 监测项目及工作量
墩台水平位移监测点布设在墩柱上,每个墩柱布设1个点。在距离二号线距离最近的3剖面所对应的8个墩柱进行自动化监测墩柱倾斜,每个墩柱布设1个自动化监测点。其中,既有轨道交通结构监测点布置断面如图1所示。
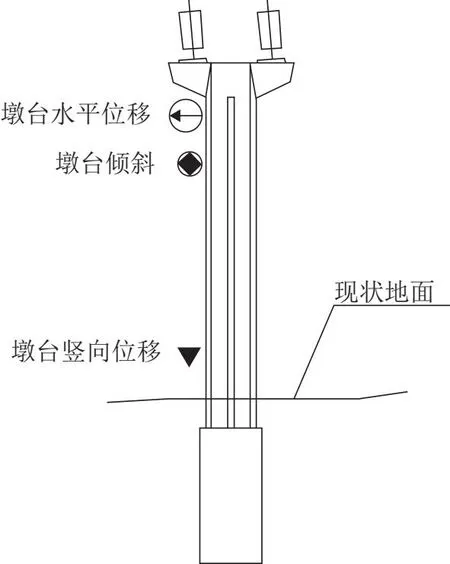
图1 既有轨道监测断面布置
由于实地试验区域的气候环境不佳,存在大量的粉尘颗粒,这样就导致扫描设备发出的激光在较差的空气环境中受到一定的影响。如果在试验区中存在行驶车辆,在经过扫描区域时同样也会产生一定的影响,使得实验结果存在误差。因此,需要进行噪声消除处理。利用三维激光扫描仪对试验区进行扫描工作时,设置桥墩反射装置作为固定点,根据反射装置靶心建立三维坐标,分析靶心中的移动趋势来记录其桥墩水平位移情况[12]。
2.3 测试结果与分析
设置三个小组,运用本文方法的小组为实验组,运用文献[2]提出的方法(对照组1)与文献[3]提出的方法作为对照组。运用三维激光扫描位移设备进行位移监测时,根据第一个峰值的位置,对位置进行适当的调整使得结果实现时域统一。在频域上,三维激光扫描位移设备采集数据频率为110 Hz。当图像的像素存在差异时传输图像的速率也存在差异。设置图像大小为1 080 pixel×640 pixel,获取视频的实际频率为30.25 Hz。利用β-极差函数运算不同位移设备的数据使得结果实现统一频域。人工监测得到的位移量标准范围为2 mm以内。相关系数平方值R2的标准值为0.94,归一化均方根误差N的标准值为0.05。在试验测量时间段内,不同小组的轨道交通桥梁水平位移监测的结果,具体如图2所示。
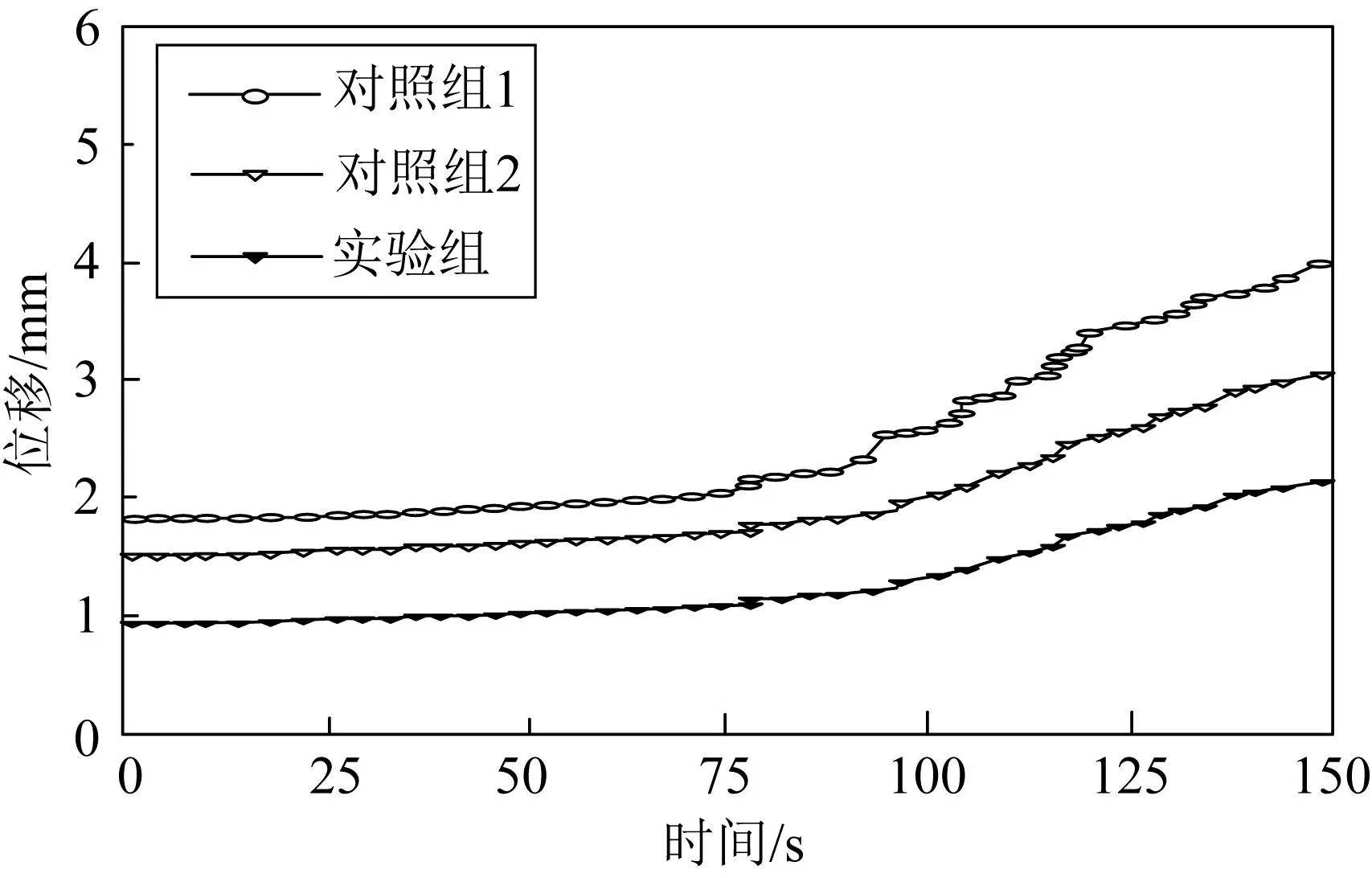
图2 监测位移对比图
由实验结果可知,三个小组对于桥墩水平位移自动化监测的趋势存在差异。随着时间的变化,实验组的位移数值最贴近人工监测数值。说明本文方法与对照组方法相比,对于桥墩水平位移的自动化监控是可靠的。
设定R2和N为水平位移设备的相关性和精准度来判断设备监测是否精准,其计算公式为

由结果可知,三维激光扫描技术监测位移的相关系数平方值最接近标准值,说明设备的相关性高,监测结果真实可靠。这是由于激光器具有高度的稳定性,它们发出的激光是极为稳定和一致的,应用三维激光扫描技术的测量方式可以消除物体表面的反射和散射对测量结果的影响,并通过对点云数据的计算,进一步提高了测量数据的精准度[13-14]。
同时,实验组的归一化均方根误差小于0.05,误差小说明设备的测量精准度高,能够满足具体应用要求。提升了设备对于水平位移自动化监测的性能,使得监测结果更加准确,具有较强的科学性价值。解决了自动化监测与影像传输中存在的问题,实现了较好的自动化监测[15]。
3 结束语
本文从轨道交通桥梁墩柱水平位移自动监测入手,通过三维激光扫描技术,探究了基于三维激光扫描的轨道交通桥梁墩柱水平位移自动监测方法。但是方法中还存在着不足,例如算法的更新问题,数据检测的耗时性问题。今后应更加完善计算,运用三维激光扫描技术在监测中能够提供高精度的实物扫描并及时得到测绘数据。预防产生安全隐患,提升工程项目的经济效益,为工程项目提供严谨性资料,为决策方带来对应的参数依据,完善对轨道交通桥梁墩柱水平位移自动监测的研究。
猜你喜欢
机械工业标准化与质量(2022年3期)2022-08-12
建材发展导向(2021年6期)2021-06-09
装备制造技术(2020年3期)2020-12-25
山东交通科技(2020年1期)2020-07-24
山东交通科技(2020年1期)2020-07-24
中华建设(2019年7期)2019-08-27
上海公路(2018年1期)2018-06-26
中华建设(2017年3期)2017-06-08
智能建筑电气技术(2015年5期)2015-12-10
铁路通信信号工程技术(2014年6期)2014-02-28
