混行交通流下单交叉口车道布设和信号配时
2023-12-07 08:03蒋林锡吴伟秦少敏
交通科学与工程 2023年5期
蒋林锡 ,吴伟,秦少敏
(1. 长沙理工大学 交通运输工程学院,湖南 长沙 410114;2. 常德市路网监测与应急事务中心, 湖南 常德 415000)
随着城市机动车辆的增加,城市交叉口作为城市道路的交汇点,逐渐成为制约交通通行能力的重要节点。近年来,智能网联技术和自动驾驶技术在中国快速发展,自动驾驶车辆有望在2050年达到总驾驶车辆的90%以上[1]。与常规驾驶车辆相比,自动驾驶车辆能有效地提升交叉口通行能力、行驶安全及降低油耗[2]。有研究认为,当道路所有驾驶车辆全部转换为全自动驾驶车辆时,出行时间降低50%[3]。然而,考虑到自动驾驶技术的发展速度和常规驾驶车辆庞大的存有量,城市道路交通在未来将长期面临自动驾驶车辆和常规驾驶车辆混合行驶的交通环境[4]。因此,研究混行交通流下的交叉口通行问题显得十分必要。
许多研究者针对自动驾驶、混行交通流和交叉口信号优化等问题进行了深入的研究,探讨混行交通流运行机理及其对通行能力与延误等的影响。ZHU等[5]基于混行交通流,提出了一种灵敏度、平滑因子均可调的自动驾驶汽车运动特性数学模型,该模型利用平滑因子来平衡车流的前后车头时距,利用该模型对混行交通流进行了一系列的仿真分析,得到了混行交通流的密度波和基本框图。蒋阳升等[6]基于智能网联车辆结队的混行交通流特点,提出了考虑智能网联车辆结队行驶的自动驾驶车辆和常规驾驶车辆混行交通流元胞自动机模型,分析了混行交通流中的车辆跟驰行为,构建了不同的车辆行驶模式。安树科等[7]基于车路协同技术完全信息可达性的特点,引入车头间距,提出了一种改进的考虑前方多辆车优化速度信息的车辆跟驰模型,提升了交通流的稳定性。刘强等[8]对十字交叉口进行了模拟仿真,通过对车速、行驶时间和平均延误等进行分析,研究了在混行交通流中不同自动驾驶车辆渗透率与不同驾驶习惯特征对交叉口通行效率的影响。刘天天等[9]针对混行交通,对不同自动驾驶车辆渗透率和车辆在不同速度下的交叉口运行指标进行了研究,通过车辆结成车队、实时配时和优化车辆行驶轨迹3 个模型,有效地控制交叉口通行,提升了交叉口的安全指数、通行能力,降低了延误和能耗。吴伟等[10]通过离散化处理交叉口,以延误最小化为目标,优化自动驾驶车辆的行驶路径及驶入、驶出交叉口的时刻。BARTHAUER 等[11]为自动驾驶车辆提供专属转弯保护相位,并据此建立了分析模型,在给定交通信号配时方案和基础设施布置的情况下,预估了交叉口通行能力。张健等[12]基于网联驾驶环境,研究了网联车辆与常规车辆跟驰机理,并建立了相应模型,研究了一种自适应可优化延误和停车次数的双环信号控制方法。PRIEMER 等[13]提出了一种分散的自适应交通信号控制的新模型,该模型利用车辆与基础设施之间的通信数据,不断优化相位序列,有效地缩短了车队长度。王亚萍等[14]针对交通流参数时空分布的特性,搭建了基于分层贝叶斯网络的模型,该模型可估计交通密度,识别交通状态。刘春禹等[15]依托交叉口信号配时,估计了车辆行驶时间,分析燃油消耗以及通行效率的变化规律,优化自动驾驶车辆与动态规划车辆轨迹。宋占国等[16]对交通流特性进行了研究,引入鲁棒优化方法,提出了一种考虑交通流时间和空间分布特性的信号控制方法。FENG等[17]提出了一种基于联网车辆数据的自适应信号相位实时分配算法。该算法通过优化相位序列和相位持续时间,最小化车辆总延误和队列长度。其还针对智能网联车辆渗透率较低的混行车流,提出了一种基于网联车辆数据的能估计常规驾驶车辆状态的算法。胡明伟等[18]为研究混行交通流的交通和环境效益,利用Vissim 交通模拟软件,采用交通尾气排放模型(motor vehecle emission simulator,MOVES),对不同自动驾驶车辆比例情况下的驾驶行为进行了仿真,该仿真考虑了高、中、低3 种交通流量水平,分析速度、总旅行时间和延误等交通因素及直径小于等于2.5 μm、大于0.1 μm 的细小颗粒物与污染物排放及能源消费等环境因素的影响。该研究发现,自动驾驶车辆比例的增加,有利于降低旅行时间和延误,减少污染物的排放,且其算法在高峰期的优化效果好于平峰期的,平峰期的优化效果好于低峰期的。
TANG 等[19]将速度引导策略引入到车辆跟驰模型中,研究了在有多个信号交叉口的单车道上的车辆的行驶行为及其油耗,其建立的模型能有效降低车辆燃油消耗和平均停车时间。 XIAO 等[20]通过分析,认为交通信号引起的交通振荡和队列反向传播会周期性地中断交通流,延长车辆行驶时间。因此,他提出了一种基于自动驾驶车辆和人工驾驶车辆混行交通流的双层控制方法,该方法考虑多个交叉口控制范围的车流变化,对多个交叉口的多辆车辆进行控制,优化主干道上多个交叉口间车辆的行驶时间和轨迹,保证车辆的连续通行。邱小平等[21-23]通过 Gipps 规则对NaSch 模型进行了优化,研究了自动驾驶渗透率和自动驾驶反应时间等指标的变动对交通流的影响。徐涛让等[24-25]对智能网联车环境下考虑反应时间影响的基本图模型进行了深入的分析和研究。BOSE 等[26]提出了一种通过设置传感器让半自动驾驶车辆跟随同一车道前车行驶的方法,并研究了在这种设置下,半自动驾驶车辆和人工驾驶车辆混行交通流的流密度曲线,用图形的方式展示了半自动驾驶车辆在不同情况下的传播冲击波的速度。CHEN 等[27]研究了一种基于自动驾驶汽车的最优动态车道逆转变换与交通控制策略,该策略通过设置集中控制器,实现了对高速公路网车道方向的动态变化和交通流量的控制。SALA 等[28]发现自动驾驶汽车组队行驶是一种能有效提升通行能力的管理策略,该策略可以最大限度地利用自动驾驶汽车的优势。
这些研究大多利用交通微观仿真工具,对自动驾驶车队协同驾驶策略进行评估,也都取得了较好的研究成果。但从宏观层面对自动驾驶车流的研究较少,因此也有学者提出了一个广义的宏观模型,在给定交通需求和车辆渗透率的情况下估计车队长度,并比较了两种不同的队列方案(合作主义方案和机会主义方案)。AMIRGHOLY等[29]针对普通驾驶、自动驾驶和通信自动驾驶车辆的异构需求,设计了一种最优通道管理策略, 在单中心城市环境中,其根据系统的瞬时状态,优化安全行驶在走廊内通信自动驾驶车辆队列的规模,动态控制交通网络的流量。YE 等[30]基于异构交通流中的自动驾驶汽车建立了模型,研究设置自动驾驶车辆专用车道对道路交通的影响。该研究通过一种图表的方式,阐述了在不同自动驾驶车辆占比下,专用车道的适用性,同时该研究还比较了不同数量的自动驾驶用车道与混行车道情况下的交通流。
这些研究主要集中于混行交通流的运行机理,并在此基础上提升道路的通行能力、降低延误等。但通过设置自动驾驶专用车道、常规驾驶专用车道和混合驾驶车道来提升交叉口的通行能力的研究鲜见。
综上所述,本研究针对自动驾驶车辆和常规驾驶车辆混行的复杂交通流,在交叉口进口道设置不同类型的专用车道和混行车道。通过合理的交叉口进口道车道布设以及信号配时,对交叉口不同类型的车流进行分配,提高交叉口的时空资源利用率,达到提升交叉口通行能力的目的,该研究可为类似道路交叉口设计提供参考。
1 模型建立
本研究以道路平面的单十字交叉口为研究对象,针对自动驾驶车辆和常规驾驶车辆混行的复杂交通流,在交叉口进口道设置不同类型的专用车道和混行车道,并对其进行信号配时,以期提高交叉口的通行能力。本研究还对初始车流中自动驾驶车辆比例ρ、自动驾驶专用道车头时距ta和常规驾驶专用车道车头时距tr等可能影响交叉口通行能力的参数进行了敏感度分析,通过能反映交叉口通行能力的放大系数ω来阐明该配时方案在不同交通情况下的可行性和有效性。该配时模型暂不考虑自动驾驶车辆专用道与常规驾驶车辆专用道方案间的对比。
1.1 目标函数
引入放大系数变量ω,ω为优化后的各流向各类型车流量与各流向各类型初始车流量的比值,其表达式为
式中:i∈{1,2,…,Lb},b∈B,d∈D,f∈F,B={e,w,s,n} ,D={ t,l} ,F={ a,r }。其中,e,w,s,n 分别表示交叉口东、西、南、北4个方向,t,l分别表示直行与左转,a,r 分别表示自动驾驶车辆与常规驾驶车辆;
Lb为交叉口进口方向b的左转和直行的车道总数;
为优化后的交叉口进口方向b转向d,且类型为f的车流量;
Nb,d,f为交叉口方向进口方向b转向d,且类型为f的初始车流量。
由ω的定义可知,ω能表征交叉口通行能力的大小,因此将ω作为目标函数,即:
1.2 车头时距
车头时距是反映道路通行能力和车辆行驶性能的重要参考指标,为道路优化和交通规划等提供了重要依据。车头时距代表着前后相邻两辆车的车头位置通过道路同一横截断面的时间差值,一般可使用前后相邻车的车头位置的距离除以后车速度来计算。本研究基于自动驾驶车辆和常规有人驾驶车辆混合行驶的交通流情况下,引入折算系数μ,提出了相应的车道平均车头时距,对车辆进行折算处理。
当μ= 0.5 时,该车道车辆折算的示意如图1所示。

图1 μ = 0.5时车辆折算示意Fig. 1 Vehicle reduction when μ = 0.5
混合驾驶车道平均车头时距按常规驾驶车道平均车头时距计算。当车道为自动驾驶专用车道时,相应的车道平均车头时距为
ta为自动驾驶专用道的平均车头时距。
当车道为常规驾驶专用车道时,相应的车道平均车头时距为
式中:tr为常规驾驶专用道的平均车头时距。
当车道为混合驾驶车道时,考虑到自动驾驶车辆和常规驾驶车辆相互跟车车头时距不一定相等,引入折算系数μ,将自动驾驶车辆折算为常规驾驶车辆,即:
式中:为交叉口进口方向b转向d的自动驾驶车流量折算成的常规驾驶车流量。
引入三元变量来区分车道类型。当= 0时,交叉口进口方向b的第i条车道为自动驾驶专用车道;当= 1 时,交叉口进口方向b的第i条车道为混合驾驶车道;当=-1 时,交叉口进口方向b的第i条车道为常规驾驶专用车道。
结合式( 3 )~( 4 ),得到车道平均车头时距,其表达式为
1.3 车道通行能力
交叉口进口道通行能力是指该条进口道在单位时间内所能提供的最大允许通过量,考虑到左转和直行的绿灯放行时间并不一定相等,引入二元变量,当= 0 时,交叉口进口方向b的第i条车道为左转车道;当= 1 时,交叉口进口方向b的第i条车道为直行车道。
交叉口进口道通行能力的计算公式为
为交叉口进口方向b的直行方向的绿灯放行时间;
为交叉口进口方向b的左转方向的绿灯放行时间;
C表示信号周期时长。
1.4 约束条件
1) 车道数量约束。
对于交叉口每个流向,至少设置一条左转车道和一条直行车道,如式(8)~(9)所示;至少设置一条车道供自动驾驶车辆行驶以及一条车道供常规驾驶车辆行驶,如式(10)~(11)所示。即:
2) 车辆功能约束。
确保车辆类型和车道功能相匹配,直行车辆只能在直行车道上行驶,左转车辆只能在左转车道上行驶,自动驾驶车辆只能在自动驾驶专用车道或混合驾驶车道上行驶,常规驾驶车辆只能在常规驾驶专用车道或混合驾驶车道上行驶,其表达式为
式中:M为一个足够大的数,在本研究中,M=9 999 999。
3) 通行能力约束。
交叉口各方向进口道上的每条车道的交通流量不能超过该车道的通行能力,如果该车道为混合驾驶车道,则该车道的自动驾驶车流量为换算后的常规驾驶车流量,其表达式为
4) 信号配时约束。
在道路的交叉口设计中,如果采用单环相位设计,则要求一股或多股交通流能同时获得通行权。但在此结构下,如果出现了某相位不对称的两股交通流,交叉口的通行效率会大幅下降。针对交通流不对称的问题,美国电气制造商协会(National Electrical Manufacturers Association,NEMA)制定的TS-2 标准中对相位的规定可有效地解决。该双环相位如图2所示。

图2 双环相位Fig. 2 Dual-ring phase
在图2中,流向1、2、3、4与流向5、6、7、8分别组成了两个独立的相位环。任意调整一个环中同一层里的相位的次序和长度都不会与其他相位产生相位冲突。与Webster 法等常规的绿灯分配方法相比,NEMA 双环相位信号配时方案可以根据具体的情况,随时调整相位长度和相位次序,能更有效、充分地利用绿灯时长。
信号周期C有上下边界,其表达式为
式中:Cmin为C的下界;
Cmax为C的上界。
该模型的信号配时基于NEMA 双环结构,绿灯时长需满足的约束条件的表达式为
式中:csn为图2中环A的绿灯时长;
cew为图2中环B的绿灯时长;
co为一个周期中的总损失时间;
为交叉口进口方向b转向d的绿灯时长,b∈B,d∈D。
2 模型求解
本研究的模型使用AMPL 进行编码,并调用bonmin 求解器对其进行求解。AMPL 是一种求解优化模型的建模语言。bonmin 求解器一般可用来求解混合整数非线性模型。该交叉口示意如图3 所示,模型中的相应参数见表1。

表1 参数取值表Table 1 parameter values
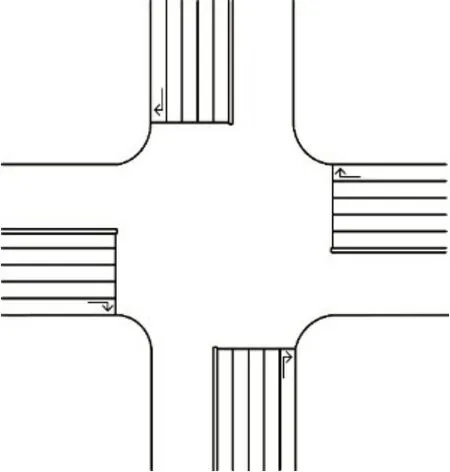
图3 交叉口示意Fig. 3 The intersections
3 结果分析
通过AMPL 编码并调用bonmin 函数对模型进行求解,计算结果见表2,车道布设如图4所示。

表2 计算结果表Table 2 calculation results

图4 车道布设Fig. 4 Lane layout
为分析该模型对交叉口通行能力提升的有效性,设置一个常规车道的交叉口作为对比模型,与该优化模型进行对比。该对比模型的平面十字交叉口的所有车道均采用混合驾驶车道。通过计算得到的两个模型目标函数值见表3。

表3 模型对比表Table 3 Comparison of models
由表3 可知,该对比模型的交叉口通行能力为6 831 pcu/h,而本研究提出的根据车辆类型设置各种专有车道模型的交叉口通行能力为7 336 pcu/h,这一数值比对比模型的增加了505 pcu/h,提升幅度为7.39%。
为进一步分析本研究提出的设置专用车道的模型对不同交通流情况的适应性,对交通流量中自动驾驶车辆所占比例、自动驾驶专用道的车头时距及常规驾驶专用道的车头时距进行了敏感度分析,研究这些参数的变化对道路平面单十字交叉口通行能力的影响。
3.1 自动驾驶车辆占比ρ
为进行敏感度分析,引入变量ρ,该变量表示初始交通流中自动驾驶流量占总流量的比例,其表达式为
模型中除初始车流量以外的相应参数选取见表1。保持模型中初始交通总流量、初始左转流量和初始直行流量与表1 中的数据一致,仅对自动驾驶流量占比进行变化。不同自动驾驶流量占比下的目标函数值ω如图5所示。

图5 不同ρ取值下的ω取值变化Fig. 5 The value of ω varies with different ρ values
从图5 可以看出,当自动驾驶流量比例ρ逐步增加时,目标函数值ω呈现逐步增加的倾向。当ρ的为0.4~0.5或0.7~0.8时,ω突然增大。这是由于在这两个区间段,平面单十字交叉口设置了多个自动驾驶专用车道,大幅提升了平面十字交叉口的通行能力。当ρ为0.9~1.0时,ω又猛然增大。这是由于当ρ为1.0 时,驾驶环境转换为全自动驾驶环境,这时所有车道均为自动驾驶专用道,极大地提高了平面十字交叉口的通行能力。
3.2 车头时距ta和tr
在模型中,自动驾驶专用道车头时距ta和常规驾驶专用车道车头时距tr之外的相应参数选取见表1,仅对ta和tr进行调整,得到的热力图如图6所示。

图6 不同ta和tr取值下的ω取值变化Fig. 6 The value of ω varies with different ta and tr values
从图6可以看出,当ta和tr逐步增加时,ω有逐步降低的趋势。这是由于随着车道车头时距的增加,车道通行能力逐渐减小,削弱了平面单十字交叉口的通行能力。
4 结论
本研究以平面单十字交叉口为研究对象,提出了设置交叉口自动驾驶专用车道、常规驾驶专用车道和混合驾驶车道后的交叉口通行能力计算方法。以交叉口通行能力最大化为目标,建立了一个考虑交叉口进口道车道布设和绿灯时间分配的数学模型,并对其进行了求解。研究结果表明,通过合理地设置自动驾驶专用车道、常规驾驶专用车道和混合驾驶车道,并进行相应的信号配时,能有效提升交叉口的通行能力。当自动驾驶车辆占比ρ较高时,该模型能取得更好的效果。
本研究的模型是建立在平面单十字交叉口上的,主要讨论此种类型交叉口进口道车道布设与信号配时方案。后续将进一步对Y 形交叉口、T 形交叉口甚至畸形交叉口等进行研究。此外,本模型仅对平面的单个交叉口进行了研究,而在实际的城市交通网络中,上、下游交叉口存在相互影响的关系。根据车流量,综合考虑城市道路上下游多个交叉口的交通能力,这也是下一步研究工作的重点。
猜你喜欢
人类工效学(2021年5期)2022-01-15
军事文摘(2020年24期)2020-02-06
绥化学院学报(2019年10期)2019-10-12
专用汽车(2018年10期)2018-11-02
心理科学进展(2018年8期)2018-02-21
中国老区建设(2016年4期)2017-01-15
专用车与零部件(2016年6期)2016-03-13
专用汽车(2015年8期)2015-03-01
专用汽车(2015年4期)2015-03-01
心理科学进展(2015年5期)2015-02-26