基于追日测控系统中跟踪装置定零算法的研究
2023-12-09 07:14温欢杨治山杨沂霖
电气传动自动化 2023年6期
温欢,杨治山,杨沂霖
(1.天水电气传动研究所集团有限公司,甘肃 天水 741020;2.大型电气传动系统与装备技术国家重点实验室,甘肃 天水 741020;3.甘肃省民族法制文化研究所,甘肃 兰州 730030)
在太阳能发电领域,光热跟踪发电已成为研究的重要课题,光热发电跟踪装置由于自身机械问题和太阳光线入射等因素的影响,导致跟踪精度和准确度大大降低,该算法的研究对象是太阳能集热发电装置的追日测控系统,特别是涉及一种跟踪装置零点确认的算法。
1 系统简介
1.1 硬件配置
追日测控系统以自动跟踪集热发电系统为主体,跟踪装置监控、电磁阀自动调度和视频监控为辅助,将斯特林发动机的运行状态、监测参数、腔体密闭性、动态视频、信号灯状态、气路状态和调度信息直观地在计算机上集中监视。跟踪装置与控制室之间实现局域网络无线覆盖,实现跟踪装置和斯特林发动机的数据交互,即跟踪系统远程遥控、伺服电机远程控制和电磁阀控制,保障发电的安全高效,实现追日测控系统的整体监测[3]。如图1所示为跟踪装置原理图。
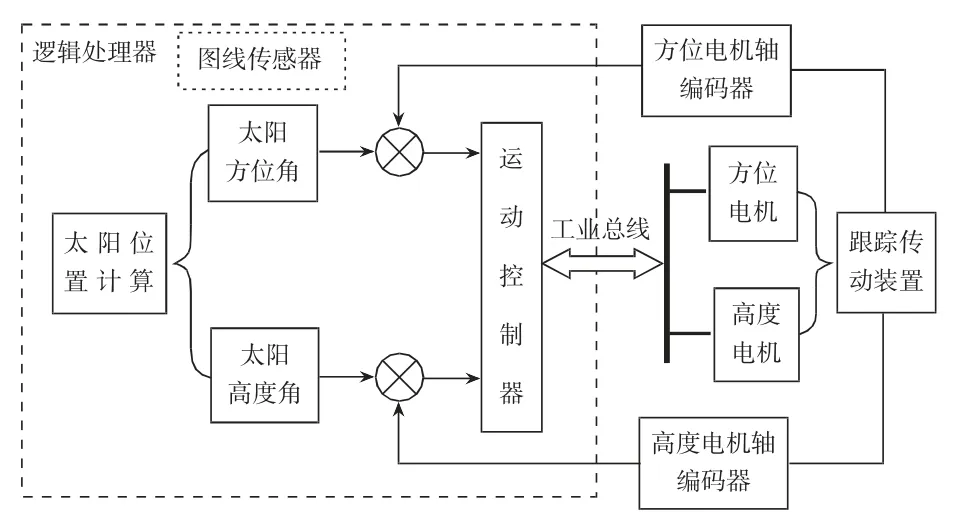
图1 跟踪装置原理图
1.2 跟踪的基本依据
跟踪太阳位置最为常用的是地平坐标系和极轴坐标系。一般工程中采用地平坐标系统,因为在天球上的所有圆圈中,地平是在自然界中唯一能看到的圆。同时由于铅垂线所具体代表的垂线,以及由水准仪所定出的水平线是在几何坐标系中能直接观测的参考方向,所以地平参考系应用广泛。在实际观测中,几何坐标系是以地方天文地平作为基本参考圈的地平坐标系[2]。因此,此系统采用地平坐标系。如图2所示为坐标系的建立转换示意图。
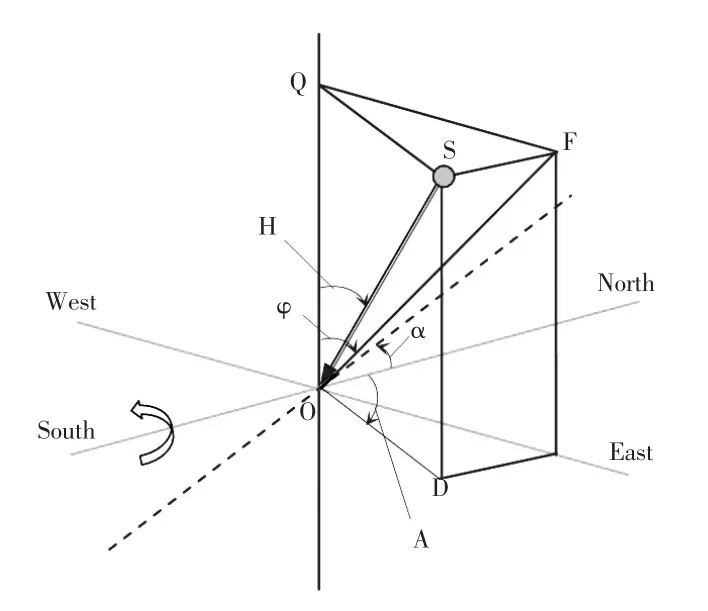
图2 坐标系的建立转换示意图
如图2所示,在地平坐标系中用太阳高度角H和方位角A表示太阳在天球中的位置。高度角H是指太阳入射光与地平圈之间的夹角;太阳升起地平线与天顶的夹角为90度,正午0度;方位角A是指太阳入射光线在地平面上的投影与地平圈正北的夹角,范围是0~360°。
当时0°<A<90°,φ=90°;
当时90°<A<360°,φ=Arctan(sinA×tanH);
太阳跟踪装置采用地平坐标系较为直观方便、操作性强,但也存在轨迹坐标计算没有具体公式可依赖的问题。而在赤道坐标系中赤纬角和时角在日地相对运动中任何时刻的具体值却严格已知,同时赤道坐标系和地平坐标系都与地球运动密切相关。
在设定跟踪地点和基准零点后,控制系统会按照太阳的地平坐标公式自动运算太阳的高度角和方位角。那么碟架的零点校准也显得非常重要,碟架在水平方向和高度方向上采用17位高分辨的编码器,来反馈碟架的实时位置,对于碟架零位的定义就与太阳方位相一致的思路来校准。任何一地太阳高度最大时,除直射点所在地,太阳总在正南或正北。
正午立于太阳下,或在太阳下竖一竹竿,影子与太阳方位相反,指向正南或正北。如果还不能确定南北,可参考以下情况:如果观测者在北回归线以北,一年四季正午太阳直射点都在正南方,影子朝向正北;如果观测者在北回归线以南,一年四季正午太阳直射点都在正北方,影子朝向正南;此时如果将碟架发动机伸出支架的影子与竹竿的影子在物理上重合时,确定碟架位置,要比之前更加准确。正北方向和水平确定以后,就可以得知碟架的理论位置,程序里在此理论位置上加入机械校准的差值,不同的碟架对应不同的机械偏差,软件自适应的灵活性大大提高[2]。
综上所述,在碟架的零位校准过程中发现,该方法在碟架机械位置如何变化时,都将有机械偏差程序去修订,零位校准相当灵活,可达到满意的运行效果。
2 研究过程和方法
2.1 太阳位置的计算
太阳能跟踪控制系统提供的基于专用控制器的64位天文算法函数库,它能根据跟踪器所在地的经度、纬度、大气压、温度、海拔高度、时间差值、大气折射率,计算出太阳相对于本地的水平角和高度角,计算精度高达±0.0003°;为更好地确定本地的经度、纬度、海拔高度和实现系统的UTC时间同步,控制系统采用GPS接收器接收信号来接收跟踪装置所在位置的GPS信息[2]。
本文研究的时间同步采用计算机与控制程序循环中断的方式,因为控制器时钟不能时时写入,这样会导致控制器内存的浪费和运行速度减慢,所以采用一天校准一次或在规定时间内校准的方式,保证控制器时钟在允许误差内,下图3所示是某地日历算法程序示意图,是此地程序运行某日晚八点的记录截图。
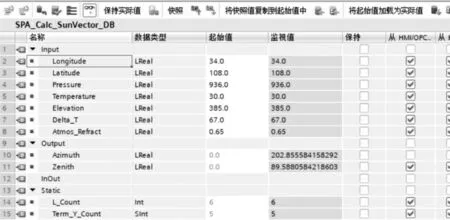
图3 某地日历算法程序示意图
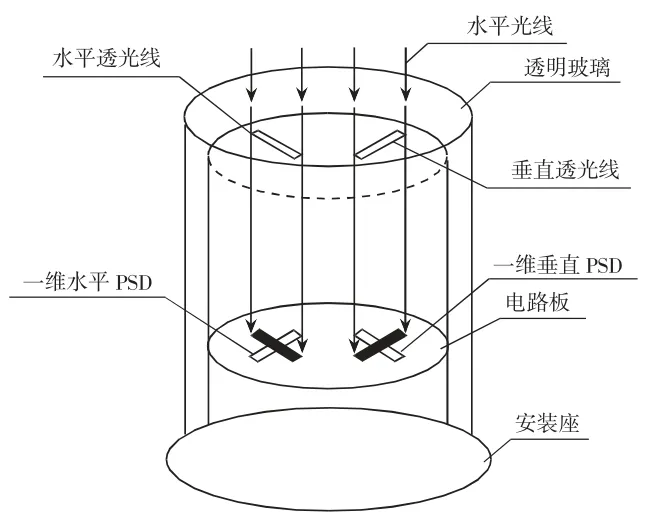
图4 光线传感器示意图
此时太阳的方位角是202.85°,高度角是89.58°,表明此刻已经是晚上。
在实际操作当中,还需要考虑到跟踪装置的步进电机、减速机,机械间隙,传感器等器件,在程序设计中加入校正系数,使得控制精度保持在合理范围内。
2.2 追踪装置定零算法的实现
通过跟踪装置俯仰方向上安装的绝对式光电编码器,其测量范围是0-90°,分辨率为16位。
设编码器在旋转时输出的负载位移为εp,其取值范围是:-32767≤εp≤32767。当跟踪装置处于-32767≤εp≤0∪16384<εp<32767时,此时设置,λ1=1,λ2=0 (λ1、λ2分别是程序执行时的两个标志位)。而当跟踪装置处于0<εp<16384区间时,此时设置λ1=0,λ2=1。
算法的实现:
如果λ1=1∩0<εp成立,且16384<εp则ζp=εp,ξLo=ζp-16384,ξHi=εp(ζp实际参(与计算的测量值,ξLo为测量值的下限,ξHi为测量值的上限);
如果λ2=1∩εp≤0 成立,且εp≤16384,则ζp=εp+65535,ξLo=ζp-16384,ξHi=εp。
由上可得跟踪装置俯仰方向上的位置θCadrage=为工程量上限,为工程量下限。
由跟踪装置水平方向上安装的绝对式光电编码器,其测量范围是0-360°,分辨率为16位。设编码器在旋转时输出的负载位移为δp,程序执行过程中,当检测有外部确认信号后,设置δoffset=δp,且(δoffset、δp为跟踪装置水平方向上的测量值,δManager实际参与运算的数值,为机械偏差)。
当δManager>0时,ζp1=δManager;当δManager≤0时,ζp1=δManager+65535;
3 验证环节
验证光斑与集热腔是否重合,需采用一个光线传感器,这是一种高精度角位移变送器,其夹角以带符号的十进制的形式输出,广泛用于自动化测量与控制系统中,例如:高精度太阳跟踪、动态瞄准、机构跟踪等场合。
平行光照射到变送器的透明玻璃窗上,透过玻璃窗下面的两个互相垂直的平行光照射到变送器的透明玻璃窗上,透过玻璃窗下面的两条细缝照到PSD上,经过电路处理产生电信号,这个电信号的大小和光线与机箱轴线的夹角成比例,信号的符号与夹角的方向相对应,且成90°夹角,证明跟踪装置的焦点、太阳和地心在一条直线上,说明光斑与跟踪装置的集热腔中心是完全重合的。再经过数字化处理变成数字信号通过CAN总线或RS-422/RS-485输出,同时输出光强信号。
跟踪装置在跟随太阳运动时,跟踪装置的二维坐标(Vertical_Act_Position,Level_Act_Position)和太阳系坐标(Azimuth,Zenith)如下图5所示,在跟踪装置的二维坐标中监测了跟踪装置俯仰方向实际位置和水平方向实际位置,在太阳系坐标中监测了太阳方位角和太阳高度角。
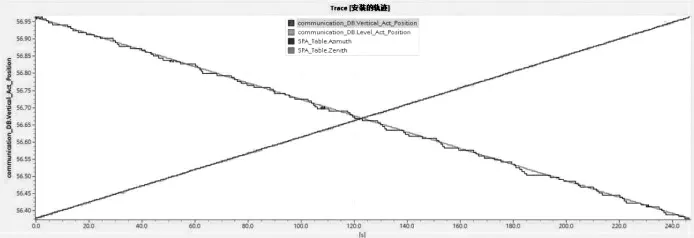
图5 跟踪装置与太阳在某段时间内的跟踪截图
在线监测结果显示:跟踪装置俯仰方向实际位置曲线与太阳高度角重合,说明装置与太阳的高度角相一致。跟踪装置水平方向实际位置曲线与太阳方位角重合,说明装置与太阳的方位角相一致。
4 结论
上述方法虽然使得跟踪装置实现了与太阳角度的对准,但是系统属于开环状态,此时需要借助外围监测软件通过串口接收安装在跟踪装置上的光线传感器反馈的数据,当软件中红色光斑移动到软件界面定义的方格区域的几何中心处时,跟踪装置的焦点、太阳和地心在一条直线上;说明光斑与集热腔室就是完全重合的,由此证明,跟踪装置的零点确认是否准确直接关系到光斑与集热腔体的对准。
如果零点确认不准,即便在控制系统和高精度的算法都成熟的条件下,跟踪装置也不能提高效率,达到其精准的随动性,此时光热转换效率也就无从谈起了。但引入该定零算法后,跟踪精度更加精确、光热效率显著提升,进而提高了跟踪装置上发电机的工作效率,该算法还适用于其他高精度跟踪的相关领域。
猜你喜欢
卷宗(2021年2期)2021-03-09
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
空间科学学报(2020年4期)2020-04-22
西南石油大学学报(自然科学版)(2018年4期)2018-08-02
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
广西电力(2016年5期)2016-07-10
河南科技(2015年18期)2015-11-25