电力设备外绝缘放电声-光协同检测及诊断技术
2023-12-29 08:08杨代勇林海丹于群英列剑平
电瓷避雷器 2023年6期
杨代勇,刘 赫,林海丹,于群英,列剑平 ,李 易
(1.国网吉林省电力有限公司电力科学研究院,长春 130021;2.西安交通大学电气工程学院,西安 710049)
0 引言
随着电力系统电压等级的提高和设备接入量的增加,对设备和系统的运行可靠性要求也越来越高。如何更精准、更高效、更快捷地进行设备在线监测或状态评估,是当前设备运行维护工作的核心目标,也是保障供电可靠性的关键[1-2]。设备或线路外绝缘的异常电晕放电通常由绝缘子表面脏污、绝缘开裂、电接触不良、局部电场异常等潜在绝缘缺陷引起,其不但是绝缘加速老化的重要诱因,也是过电压下引起设备外绝缘失效的前期征兆,因此对异常电晕放电的有效检测是设备和线路故障预防的重要环节[3-4]。电晕放电通常伴随着一系列的声、光等现象,因而相应地产生了超声检测法和紫外检测法[5-8]。为了提高巡检效率和直观性,日盲紫外成像技术和声成像技术也为应用于设备和线路外绝缘的可视化检测中。其中,日盲紫外成像基于光学孔径成像原理,采用紫外光学镜头将日盲波段放电紫外光子收集并经过微通道板进行光电倍增,最终采用光电面阵进行灰度成像,并与可见视场进行叠加,以此获得放电光源位置[9]。研究者们详细研究了电晕放电过程中紫外成像的光子数、光斑面积与放电强度、距离等影响因素的关系,为基于紫外成像的故障表征提供了依据[10];然而,受光学成像原理限制[11],日盲紫外成像在实际应用中存在一定局限性,例如,对于放电源被遮挡(或处在视觉明场范围之外)的情况,紫外光子将难以被有效捕捉,导致形成检测盲区或定位失败,并对绝缘子内部缺陷引起的放电难以发现。近年来,声学成像技术[12]因其具有较强的聚焦能力、高分辨率以及宽频段灵敏度,而被引入对放电超声源的定位[13]。应用中结合对定位算法的改进和传感阵列的优化设计,增强了声学检测的指向性、抗干扰性和准确性,罗勇芬等以经典旋转子空间算法(RSS)与高阶累积量为基础,提出改进RSS算法实现了更强的宽带聚焦、定向增强和噪声抑制等处理能力[14]。李济深等通过传感器阵列的设计与高阶量累积量展开,实现了虚拟阵列扩展,提高了阵列的方向锐度与定位精度[15]。由于声学信号具有较强的固体媒介穿透能力,其受视场遮挡的影响较小,弥补了紫外成像检测的不足。表1中总结了紫外成像和声成像在放电源可视化定位应用的特点[13,16]。由对比可知,超声成像易受环境噪声的影响导致定位精度下降,但除设备外绝缘的局部放电外,超声成像对常见的机械结构损伤、零件松动和充气设备的气体泄漏也存在故障判别效果;紫外成像技术在障碍物遮挡情况下,难以实现有效定位。
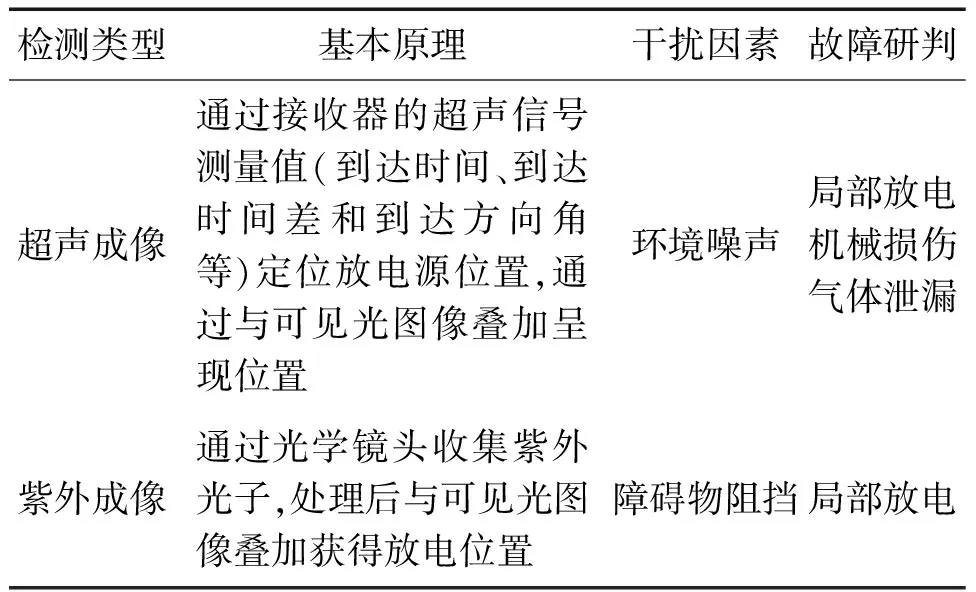
表1 不同检测方法的应用特点
研究表明,联合检测系统可以利用多种检测方法的优势实现互补,克服单一检测方法的不足[10]。此外,随着图像信息融合技术在医学检测、军事卫星和红外遥感等方面的应用,多图像联合检测技术发展更加成熟[17-19]。鉴于紫外成像和超声成像各自的技术特点,本研究将两种方法进行硬件和算法上的融合,一起发挥声、光两种原理的协同优势,实现更高定位精度、更广的检测视场和更强的缺陷检出能力,同时进一步提升设备和线路巡检效率和故障研判能力。
本研究基于静态方向图完成了单螺旋超声阵列结构设计,评估了阵列的声学性能;在单螺旋阵列的硬件基础上,提出了一种具有高聚焦精度的改进多重信号分类算法,增加了阵列在90°附近时的定位精度,实现了局部放电的超声定位可视化;然后在声成像有效视场内引入由紫外镜头模组、微通道板和CCD构成的日盲紫外成像系统,提出了一种非中心视场的图像融合标定方法,实现了局部放电的紫外定位可视化;同时考虑周围环境噪声的影响,提出了一种可变权重的声-光协同可视化信息融合方法,将声学强度点阵、紫外强度点阵和可见光像素视场的空间信息谱融合,实现超声-紫外可视化协同诊断。最后,采用本装置对实际模拟电晕放电和变电站内电晕放电进行了实际检测,并通过相对误差分析验证了声-光可视化诊断的效果。
1 局部放电的超声定位可视化
1.1 单螺旋阵列的设计
本研究受UHF检测领域螺旋天线结构的启发。所设计的单螺旋超声阵列由31个超声传感器组成,满足式(1)。
r=r0eαφ
(1)
其中,r为螺旋线上一点与原点之间的距离,r0为螺旋线上最远点与原点之间距离,即内径;φ是螺旋的旋转角,s为螺旋增长率,由式(2)决定。
(2)
其中,α是螺旋臂上一点切线与同一点径向线之间的角度。
31阵元单螺旋阵列传感器的布置见图1(a),图1(b)为相应的传感器阵列PCB板。由图1(b)可知,相机口位于传感器阵列的PCB上,靠近阵列中心,与单螺旋结构排列的31个MEMS传感器中心对齐。

图1 单螺旋阵列的理论结构和PCB实物
本研究通过静态方向图对单螺旋阵列的声学性能进行评估。方向图表示了阵列的输出绝对值与来波方向之间的关系。研究表明,阵列方向图的主瓣越窄,声学性能越好,定位效果越准确[12]。阵列的静态方向图由式(3)~(4)计算可得。
(3)
(4)
式中,Y(θ)表示来波方向θ上所有传感器接收信号的能量和;τl表示每个阵元到参考点的信号时延;m表示阵元数,文中m=31;ωl表示每个阵元的权重;g0表示来波的复振幅;G(θ)表示Y(θ)的相对值。
单螺旋阵列从形状上看近似于若干圆环组成的阵列,因此其方向图与圆环相似,但阵列的静态方向图受阵元的形状、角度影响较大,直接影响其定位精度。为此,笔者将提出的阵列与常见的31阵元圆环阵列、31阵元平均分布的无转角同心圆阵列相比较,得到的静态方向图与方向性切面图见图2[20]。

图2 超声阵列静态方向图
方向性切面图选取了最能代表阵列方向性的静态方向图的切面图。选取典型阵列的切面主瓣零点宽度(BW0)与半功率点宽度(BW0.5)见表2。
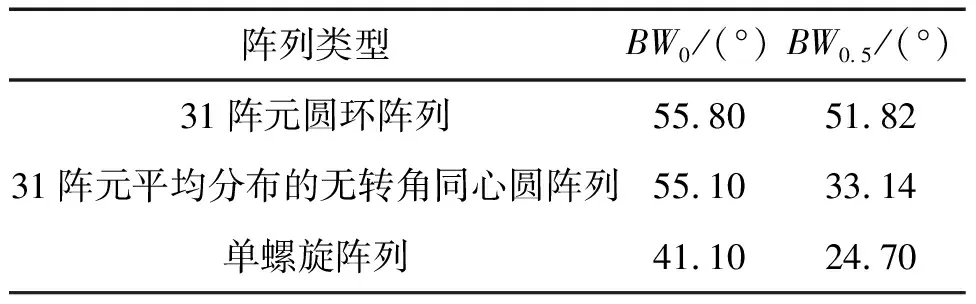
表2 典型阵列的主瓣与旁瓣宽度
由图2和表2可知,随着阵列形状的变化,从圆环阵列到单螺旋阵列,主瓣宽度逐渐变窄,旁瓣逐渐减小,表明阵列的声学性能逐渐提升,证明了提出单螺旋阵列具有良好的声学性能。
1.2 定位算法
窄带信号的数学模型见式(5)。
X(t)=AS(t)+N(t)
(5)
式中,X(t)表示阵列输出的M×1维信号矢量,A表示阵列的M×N维方向矢量阵列,S(t)表示空间信号的N×1维矢量,N(t)表示阵列的一维信号。
阵列的协方差矩阵见式(6)。
R=E(XXH)=AE(SSH)AH+σ2I=ARSAH+σ2I
(6)
其中,RS表示信号的协方差矩阵,ARSARH表示信号本身。由于信号和噪声相互独立,协方差矩阵可以分解为信号和噪声两部分。
矩阵R经特征值分解为噪声子空间US和信号子空间UN两部分,见式(7)。
(7)
传统的多重信号分类(MUSIC)算法[21-22]基于以下假设:
1)信源数小于阵元数。
2)噪声是零均值高斯噪声,阵元的噪声相互独立,噪声和信号也相互独立。
3)信号源为远场信号。

(8)
通过改变方向角和俯仰角来寻找光谱峰值,功率PMUSIC取最大值时的方向角和俯仰角即为声源的方向角与俯仰角。
由于空间位置的差异性,阵列上的不同传感器接收信号误差不同,对定位结果产生的影响也不尽相同。因此,为进一步提高空间谱的定位精度,扩大定位角度范围,对传统MUSIC算法提出改进策略。针对不同的阵列结构,考虑引入不同的加权矩阵来改变传感器接收信号的作用权重。设W是阵列信号作用的加权系数矩阵,对不同传感器的噪声子空间进行重要性加权,当W为单位矩阵时,该空间谱函数即为经典MUSIC算法空间谱函数。
对于提出的单螺旋阵列,实验发现外侧阵元接收到的信号定位误差较小。因此,通过提高外侧传感器接收信号的作用权重来进一步提升阵列的定位精度。初始矩阵为31行31列的单位矩阵,依次将权重赋在主对角线的31个元素上,得到本研究引入的加权矩阵W。改进加权的MUSIC算法见式(9)。
(9)
将采集得到的31路超声信号导入到MATLAB中,分别使用传统MUSIC算法和改进MUSIC算法进行定位测试,其中声源采用D型21 kHz超声换能器。定位过程中测得声源相对传感阵列中心的方位角与俯仰角为(94°,81°),得到两种算法的定位空间谱见图3。

图3 实验优化前后的定位空间谱
由图3中的仿真结果可知,经系数矩阵加权作用后,改进的MUSIC定位算法突出了90°附近方向角的空间谱峰值,扩大了原有的定位角度范围,明显增加了定位精度。
1.3 空间谱的融合与可视化
为了直观地观察到局部放电的位置,文中通过图像融合技术实现了超声定位结果的可视化。首先,采用针-板放电模型模拟变电站内的电晕放电,标定得到放电模型相对传感阵列中心的方位角与俯仰角为(65°,18°)。利用单螺旋阵列与改进MUSIC算法进行超声定位,得到了放电源附近的声强分布点阵,见图4(a);同时结合可见光相机视场(FOV)(见图4(b))获取了现场的可见光图像。然后,假设图4(a)为前景,图4(b)为背景,前景和背景的RGB矩阵分别由A(x)和B(x)表示,进一步由式(10)计算融合图像的矩阵C(x)。

图4 图像融合过程
Cr(x)=Ar(x)·α+Br(x)·(1-α)
Cg(x)=Ag(x)
Cb(x)=Ab(x)
(10)
式中,α为不透明系数,取值介于0到1之间。
计算融合图像的RGB矩阵后,得到局部放电定位的超声可视化结果,见图4(c)。从超声成像的结果中直观地观察到局部放电的发生位置,具有良好的定位精度,验证了提出算法的有效性。
2 紫外成像融合与可视化
2.1 紫外成像系统的设计
分光式日盲紫外-可见双光谱相机的结构见图5,其主要由分光系统、紫外镜头、微通道板紫外CCD、可见光CCD和图像处理模块等部分组成[23]。电晕放电的紫外光和背景光穿过紫外镜头和日盲紫外滤光片照射到紫外成像微通道板上,激发出的光电子经光电倍增后轰击到后端屏幕,产生可见光图像;再经过光锥耦合,照射到CCD像面上成像,构成双光谱相机的紫外光路;另一部分光经过反光镜1和反光镜2的两次反射,进入可见光镜头。日盲双光谱相机经上述过程的协同工作,实现紫外信号的实时采集与显示。

图5 分光式紫外相机系统结构示意图
2.2 紫外-可见光图像融合的标定
由于紫外镜头和可见光镜头的焦距和尺寸不同,导致获取的图像视场并不重合,见图6(a)。本研究提出了一种新方法解决非中心视场的图像融合标定问题,利用紫外和可见光学系统存在的数学关系进行坐标点转换,表达式见(11)~(12)。选取原点(0,0)为紫外和光学系统的中心像素点,经式(11)~(12)变换,视场中的(mi,ni)标定后得到:
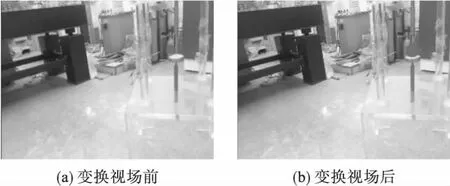
图6 紫外图像视场标定结果
(11)
(12)
经视场标定后,获取的新紫外图像将与可见光视场重叠,见图6(b)。
2.3 紫外-可见光图像融合算法
假设可见光图像为背景图像,紫外图像为前景图像,紫外成像系统首先将采集到的视频信号转化为数字信号码流输入图像处理部分;再对数字信号进行仿射变换,与可见光视频信号共同处理后得到带显示的视频信号;最后在OpenCV环境下显示视频信号,具体的成像算法流程图见图7。为保证顺利融合,首先利用前述方法将两视场范围大小调整一致;在融合过程中,对图中像素点逐一计算,如果紫外图像的像素点灰度值为0,那么融合图像灰度值为可见光图像灰度值;如果灰度值不为0,则融合图像灰度值调整为(255,0,0),即显示为红色。
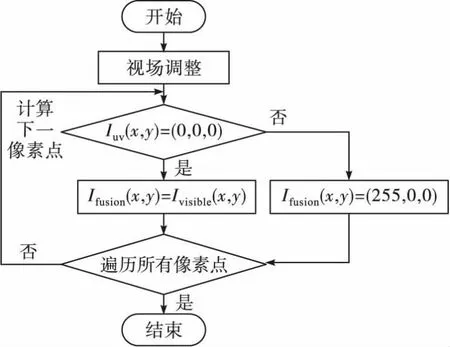
图7 紫外成像算法流程图
紫外图像融合结果见图8,前景图像中灰色表示紫外相机监测到光子密集出现的区域,背景图像是由可见光相机拍摄的实景。由定位结果图明显看出,经过紫外相机的处理,现场工作人员可以精确地定位故障点。

图8 紫外成像融合效果图
3 超声-紫外可视化协同诊断
3.1 超声-紫外可视化协同信息融合算法研究
由日盲紫外成像的原理可知,当局部放电源与紫外镜头间的传播路径存在遮挡时,紫外镜头采集的光子数将明显减少,直接影响定位结果;同时,有研究表明在环境噪声较大的情况下,超声定位算法的精度将明显下降[24-25]。基于超声和紫外检测技术的局限性,本研究提出一种可变权重的声-光可视化协同信息融合算法。通过可变权重将超声成像和紫外成像的定位结果有机融合,既有效利用了声学信号较强的固体媒介穿透能力,又高效结合了光学信号不受噪声干扰的能力,进一步提升了现场的缺陷检出能力。
3.1.1 权重计算

(13)
(14)

(15)
JF值意味着特征的可分离性,JF值越大则数据的可分离性越强。
计算不同信噪比情况下的JF(k)值,则不同信噪比下的权重为
(16)

最终,需要得到的超声-可见光联合检测信息由式(17)计算可得
(17)
3.1.2 基于变权的超声-紫外可视化协同检测信息融合方法
在实验和数据分析的基础上,提出了基于变权的超声-紫外可视化协同信息融合方法,整体流程见图9。主要步骤为
2.选择合适的课堂教学模式。高中英语教师在课堂教学中要重视学生的主体地位,根据学生特点设计各个教学环节,以学生活动为主,加强情景创设,多联系生活实际,活化教材和课堂。使用网络增加课堂教学容量,使学生积极参与并展示他们的语言才华和计算机使用才华,同时也加强了课堂的吸引性。在必修1 Unit3 Travel journal的教学过程中,学生利用网络查阅了他们想去旅游的地方和已经旅游过的地方并且把国庆节期间拍的照片带到课堂,“英语课要总这样上就好了。”课后学生兴奋的抒发着他们对多元话英语阅读课程的兴趣。
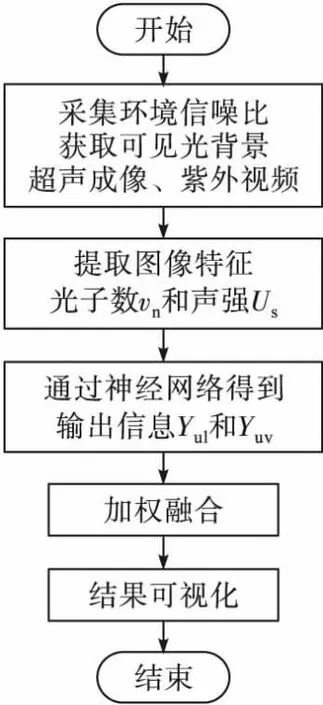
图9 可变权重信息融合算法流程图

图10 神经网络模型训练示意图
1)在协同诊断之前,需进行神经网络模型[28-29]训练为正式诊断做准备,模型训练过程见10图,样本集通过实验缺陷模型获取。首先对缺陷模型施加10 kV左右的电压,保证局放信号的产生;采集过程中紫外图像以25帧/秒的帧率录制视频,录制时间为60 s,拍摄距离限定在20 m~30 m范围内,仪器增益为100%;超声图像的拍摄距离同样限制在20 m~30 m的范围内,拍摄时以正对物体所在的位置为法向,选取相机、物体的连线与法向形成的角度进行拍摄,每间隔20°拍摄一组,范围在(-40°,40°)内;接收频率范围设置为20 kHz~60 kHz,对采集的超声信号手动添加高斯白噪声。其步骤为
a)获取每种检测图像的100个样本。
b)通过式(13)、(14)和(15)计算JF值。

d)建立两个BP神经网络,BP神经网络的输入分别是紫外图像光子数vn和超声声强Us,同时也需提供对应采集环境的信噪比SNR;输出为局放融合信息Yul和Yuv。隐藏层为1,每层有10个神经细胞,训练精度为1×10-5。
2)拍摄待检测对象的可见光图像、超声成像结果和紫外视频;同时检测环境的信噪比。
3)处理图像并提取图像特征点,包括可见光图像、紫外图像光子数vn和超声定位的声强Us。
4)根据提取的可见光图像、紫外图像光子数vn、声强矩阵Us和信噪比一起输入训练好的BP神经网络中,得到局部放电信息输出Yul与Yuv。
5)通过式(17)完成信息融合并计算最终的局放信息结果Yfu。
3.2 超声-紫外可视化协同诊断的现场应用
综合上述系统结构设计与诊断算法,本研究完成了相应的超声-紫外可视化协同检测装置的开发,见图11。应用开发的协同检测装置进行变电站现场实测,并从检测效果、检测误差方面与超声检测、紫外成像检测效果作对比,检验提出算法的有效性。
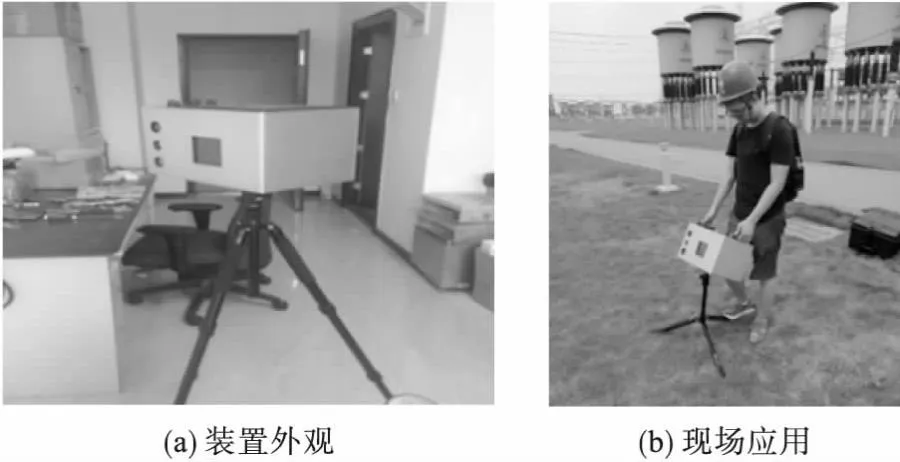
图11 超声-紫外可视化协同检测装置
3.2.1 超声检测现场应用结果
对设计的单螺旋阵列与提出的改进MUSIC算法进行现场应用效果的试验验证。检测结果发现变电站内的悬式绝缘子连接处和变压器套管连接处存在电晕放电现象,超声定位图像见图12。

图12 单螺旋阵列定位成像变电站现场检测结果
从图中明显观察到设计的单螺旋阵列与提出的定位算法直观的将设备与线路的连接处存在电晕放电显示在可见光图像上。在现场应用中,有效解决了设备排列紧密造成的难以准确辨识电晕放电位置的问题,提升了检测效率。
3.2.2 紫外检测现场应用结果
通过现场巡检验证日盲紫外成像系统的可行性,结果发现开关套管连接处存在放电现象,现场效果见图13。
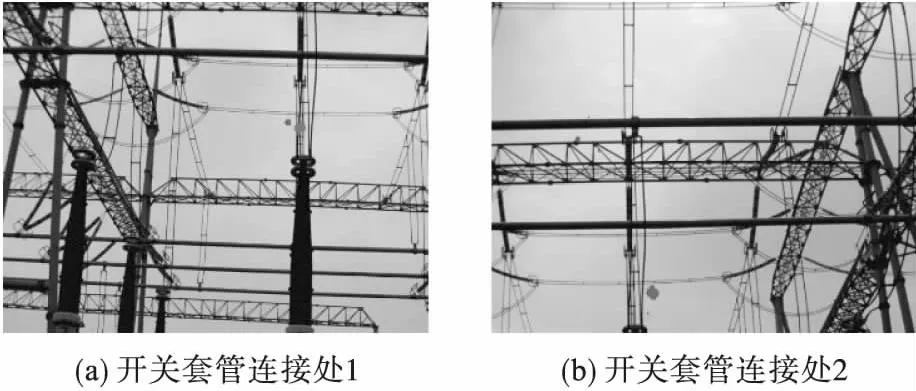
图13 日盲紫外成像变电站现场检测结果
从可见光图像中明显观察到开关连接处的电晕放电现象,基本实现了较准确定位,但由于测量距离原因,现场应用过程中接收的光子数较少,导致成像位置稍有偏移。
3.2.3 超声-紫外可视化协同检测结果
根据提出的可变权重超声-紫外可视化协同信息融合方法,实现了超声图像、紫外和可见光图像的信息融合,有效提升了定位精度,实现了超声、紫外检测技术的优势互补,其结果见图14。
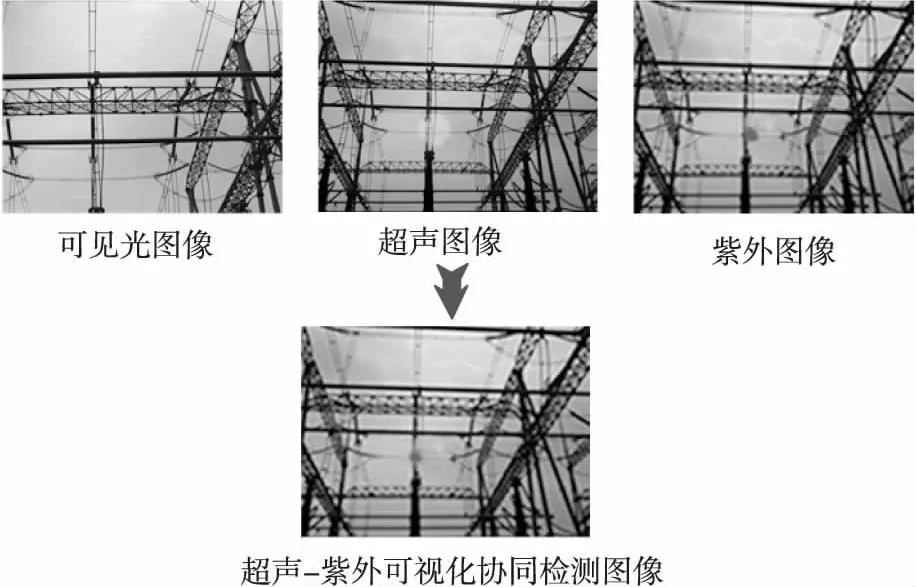
图14 超声-紫外可视化协同检测成像结果图
在变电站巡检过程中发现了一个电晕放电定位的典型案例,此处母线、绝缘子和支架在视场范围内排列紧密,现场典型故障的检测结果见图15。在应用紫外成像检测过程中,发现某视场存在较为分散的紫外光子分布,且由于母线的遮挡和视线中两绝缘子的交汇,导致难以判断具体的故障位置;更换超声成像的方式检测同样位置,由于精度问题导致存在较大的红色阴影,同样难以精确判断故障位置。此故障位置较高,且存在于变电站内难以深入的部分,给检修人员排查带来困难。采用超声-紫外可视化协同信息融合方法明显缩小了定位范围,精确定位了电晕放电位置,大大降低了检修难度。
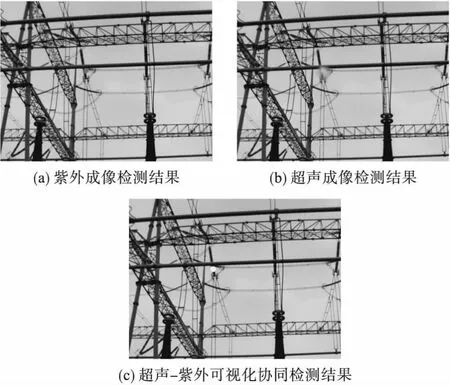
图15 现场典型故障的检测结果
3.2.4 定位误差分析
本节从定位图像中定位点和实际放电点得图像像素位置(px)出发,对超声成像检测、紫外成像和超声-紫外可视化协同检测的定位精度对比分析,定位误差见表3。
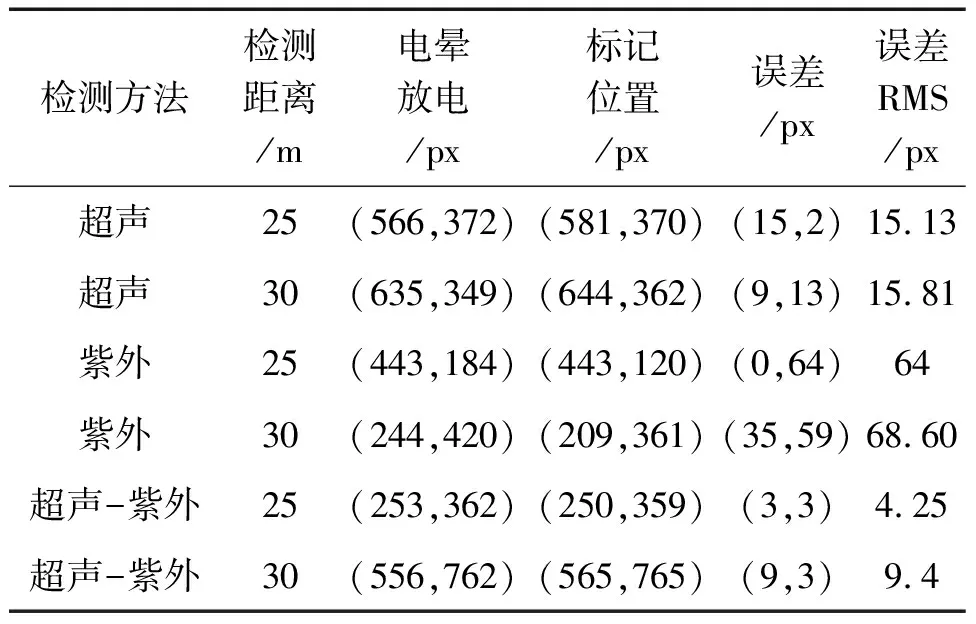
表3 定位误差分析
表中RMS表示定位点与实际放电点在图像上的距离,即误差距离(px)。表中显示,超声定位在检测过程中的误差距离为15 px左右,紫外成像为65 px左右,超声-紫外协同检测的误差距离下降至10 px以下,三者相对误差由式(18)计算[30]
(18)
其中,Ex为定位相对误差;xz为定位图像x轴总像素点;vz为定位图像y轴总像素点。
经计算,紫外成像定位相对误差为8.2%,超声定位成像的相对误差为3.5%,优化后的超声-紫外可视化协同诊断算法的相对误差成功降至1%。
4 结论
本研究提出了一种超声-紫外协同的户外绝缘状态可视化诊断技术。主要结论如下:
1)基于静态方向图设计了单螺旋超声阵列,有效窄化了BW0与BW0.5,提升了定位阵列的声学性能;结合改进MUSIC算法与透明融合算法,成功地实现了高聚焦精度的超声定位与结果的可视化展示。
2)基于折射光路紫外成像方法,给出了成像模块设计的具体思路,提出了一种紫外-可见光视场标定方法,实现了放电的紫外定位可视化。
3)考虑环境噪声的不同,提出了一种基于变权的超声-紫外联合检测信息融合的方法,给出了具体步骤,将可见光、超声和紫外检测信息有机融合,将定位相对误差下降到1%,提升了复杂环境下的检测精度。
基于以上研究内容,本研究最终实现了电力设备的超声-紫外可视化协同诊断,弥补了单一检测方法的不足,具有更强的检测能力与更高的检测精度。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
世界科学技术-中医药现代化(2022年3期)2022-08-22
云南化工(2021年8期)2021-12-21
中国光学(2021年6期)2021-11-25
海洋信息技术与应用(2020年1期)2020-06-11
传媒评论(2019年4期)2019-07-13
中国医疗设备(2019年1期)2019-01-15
红领巾·探索(2018年10期)2018-11-14
娃娃乐园·综合智能(2016年15期)2016-12-01
数学大王·低年级(2015年6期)2015-07-09