4 000 m 深海科考重型ROV 成套系统设计及应用
2024-01-09 07:06涂绍平朱迎谷项立扬张中华郭天翔
控制与信息技术 2023年6期
涂绍平,朱迎谷,项立扬,张中华,郭天翔
(上海中车艾森迪海洋装备有限公司, 上海 201306)
0 引言
重型遥控水下机器人(remotely operated vehicle,ROV)是深海生态科学考察的利器,其能搭载机械手、盐温深测量系统(CTD)、采水瓶、浅剖仪、多波束测深仪及微生物/沉积物取样器等深海探测传感工具在海洋中展开岩石、泥土、水、生物等取样及原位试验,完成深海科考任务,是当今综合科考船必配装备[1-2]。然而,目前国内外的ROV主要集中在油气工程施工应用,缺乏科考作业的适应性设计[3-4]。虽然国内的ROV技术经过科研人员的不断研究,有了较大的进步,实现了深度的突破,但在应用可靠性方面和科考操作实用性方面仍有待提高[5-7]。 上海中车艾森迪海洋装备有限公司基于自主可控供应链,围绕深海科考作业要求,通过自排缆双冗余驱动收放系统设计、符合科学家操作习惯的便捷分布式紧凑型水面供电控制系统设计、作业级4 000 m 轻量化水下机器人本体设计及组合多功能可拆卸的作业底盘系统设计,解决了深海科考作业机器人成套系统的部件受限问题,并成功研制了工程产品。本文介绍了该系统组成、基本功能和工作原理,以及ROV水面布放回收系统、水面供电及控制系统、机器人本体结构、通信系统、供电系统、液压系统及作业系统的设计方案,并对其进行工厂测试、4 000 m级海试和实际科考任务,充分验证了该系统的可靠性及功能完整性。
1 4 000 m重型科考ROV成套系统
1.1 系统组成
深海科考重型ROV 需要满足一定海况下安全布放回收、水下航行及水下作业等要求,如图1 所示,其主要由水面布放回收系统(LARS)、水面供电控制系统(CC)、ROV本体、ROV作业系统、维修间组成。其中LARS 通常由脐带缆绞车、A 架、驱动液压泵站(HPU)和LARS操控台(CS)组成。
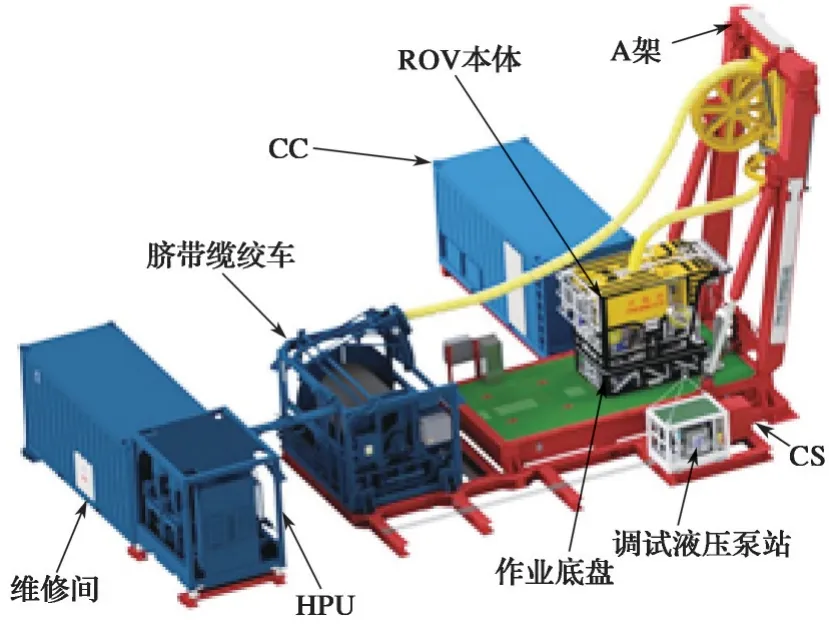
图1 ROV 成套系统组成Fig.1 Composition for complete ROV system
各子系统部件作用如表1所示。

表1 ROV 系统组成及功能描述Tab.1 Components and functions of the ROV system
1.2 技术参数
ROV成套系统主要技术参数如表2所示。该ROV系统的组成及布局设计可以更有效地利用母船空间和避免甲板焊接带来的下层甲板着火风险;通过150 hp@50 Hz适用性设计可提高水下抗流能力和稳定性,真正发挥ROV作业动能;采用具有止荡功能的双电机驱动LARS 系统,收放缆速度达60 m/min,满足4 级作业、5级回收的设计,保障了作业的安全性和高效性。

表2 ROV 系统主要技术参数Tab. 2 Main technical parameters of the ROV system
2 关键子系统设计
2.1 自排缆双电机驱动LARS系统
LARS 系统框图如图2 所示。HPU 将690 V/50 Hz船电进行内部分配,由2路断路器、软启动器和电机组成液压泵1 和液压泵2 的驱动回路,产生液压流体动能,每路回路设计输出功率110 kW,两路驱动回路可同时工作或只1 路工作,同时工作时达到满载工况。HPU 输出1 路压力回路给绞车液压阀组,输出1 路压

图2 LARS 系统框图Fig.2 Block diagram of LARS
CS 通过HPU 配电获取控制电源,为柜内单元供电,并对绞车和A 架电控箱供电。CS 的PLC 控制单元通过以太网总线实现对HPU、绞车和A架信息的采集和远程监控,根据操作显示单元和人机界面单元命令、脐带缆的张力和收放长度等信息,发出绞车和A 架液压执行机构的驱动指令,并分别通过绞车电控箱的驱动比例阀控制卷筒马达组的正反转,由齿轮传动实现卷筒正反转,从而实现卷筒对脐带缆的存储和收放;通过驱动电磁阀控制排缆器马达正反转,由螺杆传动实现排缆器左右移动;通过驱动比例阀控制左右主臂及其伸展臂的4路油缸,实现A架的伸缩和内外摆动;通过驱动电磁阀控制止荡器纵向阻尼油缸的伸缩,实现止荡器纵向阻尼;通过驱动电磁阀控制闩锁油缸的强制内缩,实现闩锁的开启;通过驱动电磁阀控制止荡器旋转机构马达实现正反姿态调整。另外绞车静态接线箱接入ROV 甲板脐带缆,通过滑环将ROV 动力源和光电信号接入旋转接线箱,由卷筒上缠绕的水下脐带缆接出至ROV。力回路给A 架液压阀组,并各自通过回油回路回到油箱和通过压力敏感回路将压力传递给调压回路,分别回到液压泵1和液压泵2,实现多支路压力和流量的独立调节。而绞车卷筒马达组外壳泄漏油直接回到油箱。
本文所研制的LARS 装置如图3 所示,HPU 位于最左侧,通过集装箱转锁快速与甲板预留锁扣对接;绞车和A 架焊接在底座上;底座通过集装箱转锁快速与甲板预留锁扣对接,并与关键点副板焊接,避免甲板大面积焊接;CS 操作台位于舷边,方便操作人员观测ROV的入水及回收。

图3 LARS 装置Fig.3 LARS equipment
2.2 便捷操作的分布式紧凑型CC系统
CC系统主要实现供电和水下监控两大功能,其根据自身特点分为低压柜、高压柜、控制柜1、控制柜2、操控台和视频墙,紧凑布置在20英寸标准集装箱内。CC供电设计方案如图4 所示,低压柜将船电380 V/50 Hz接入,经过高压柜升压后通过脐带缆接到水下接线箱,再分别为ROV 水下泵站电机、ROV 水下主电子舱和科考电子舱供电。同时,低压柜也为控制柜1、控制柜2、控制集装箱、维修间及调试泵站等设备供电。

图4 CC 高低压配电框图Fig.4 Block diagram of CC HV&LV PDU
CC控制方案如图5所示,主操作计算机和副操作计算机分别运行水下机器人SCADA 监控软件;PLC作为主控制器通过OPC接口分别与主操作SCADA监控软件和副操作SCADA 监控软件通信,并实现数据在主、副SCADA监控软件上的备份。PLC与维护计算机通信,可以实现数据访问诊断和程序备份及更新。PLC通过Ethernet/IP总线与水下设备采集串口协议转换器、操控IO和供电IO通信,实现对水下传感器和设备的监测与控制,以及对操作指令的采集和供电系统的监控。水下采集设备和传感器有主电子舱和科考电子舱 IO 单元、TCU 阀箱、HCU 阀箱、灯控箱、惯导、4K相机和云台。各计算机视频信号以及水下视频采集信号输入视频处理计算机,由其进行视频的拼接、分割、任意切换、漫游及开窗等,并由超高清视频刻录机和视频刻录机分别对超高清视频和标清视频存储和回放,由字符叠加器对选定视频信号进行字符叠加处理。声呐通过RS232 采集,由光纤通信转换后在水面由声呐计算机直接处理并显示。T4机械手通过光纤通信在水面接入机械手操作盒,由其直接操控。其中POD 指主要用于ROV水下供电通信管理的电子舱,TCU指控制推进器的液压阀箱,HCU指控制工具的液压阀箱。
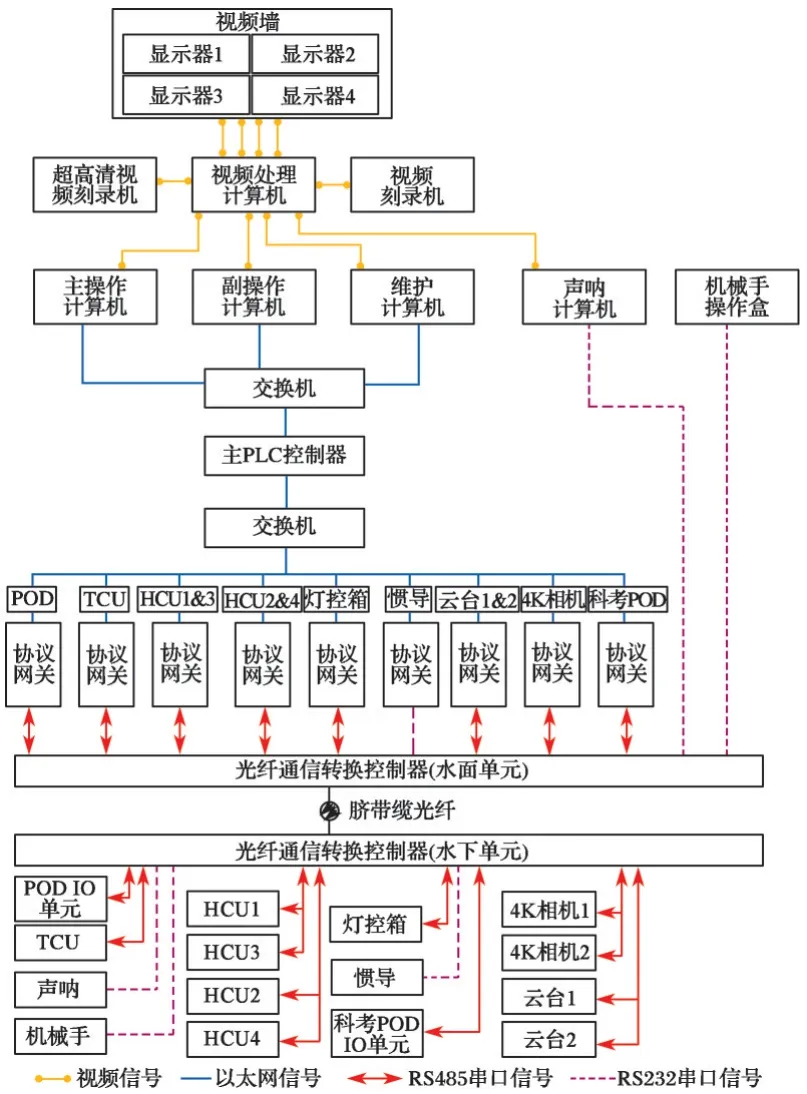
图5 CC 控制系统框图Fig.5 Block diagram of CC control system
科考型CC 系统需要满足主操作手、副操作手及科学家的操作要求,图6 为紧凑型三工位深海科考水下机器人操作台布局,其设置独立可切换4K显示屏及4K摄像云台操作功能,最大限度地满足了科学家的科考要求[8]。

图6 科考型CC 布局Fig.6 Scientific CC layout
2.3 4 000 m轻量化工作级ROV本体
2.3.1 ROV液压系统
根据ROV 本体液压功能所设计的双泵独立电机功率共享的液压系统如图7所示,其由1台深海电机双轴连接,一端连接主推液压泵1,一端连接工具液压泵2和冷却泵3。主推液压泵1将主油箱液压油通过压力回路泵送至TCU阀箱,通过软件控制TCU调压阀控制主回路压力,并采用矢量分配控制TCU 驱动4 台水平推进器和3 台垂向推进器,实现前后、上下、左右、纵倾、横摇和旋转六自由度运动。同时主推液压泵1为主从控制机械手提供液压。工具液压泵2 将工具油箱液压油通过压力回路泵送至各HCU阀箱,其中软件控制HCU1 调压阀控制工具回路压力,并通过控制各HCU内置电磁阀来控制外接工具。冷却泵3 将深海电机壳一端液压油经过散热管泵送至深海电机另一端,实现机壳内的液压油循环,达到电机冷却的效果。另外分别为TCU、HCU、灯控箱及接线箱的箱体提供1组液压补偿器,为推进器轴承外壳提供1组液压补偿器,为深海电机外壳提供1组补偿器,实现ROV随水深变化对各设备外壳内外压力的平衡。2.3.2 ROV电气系统

图7 ROV 本体液压系统框图Fig.7 Block diagram of ROV hydraulic system
ROV 电气系统主要由脐带缆接线箱、主POD、科考POD 和深海电机、灯控箱、TCU 控制板、HCU1~HCU4控制板及搭载设备等组成,实现电力分配、连接和控制。如图8 所示。脐带缆接线箱接入脐带缆后,将三相高压分配至深海电机实现电机驱动,两相高压分配至水下控制变压器以提供水下交流110 V单相低压电源,分别为主POD和科考POD供电。其中主POD内通过可恢复保险丝、开关电源及继电器实现HCU1~HCU4 控制板、TCU 控制板、灯控箱、摄像云台系统、导航系统、声呐系统、机械手、应急系统及扩展系统1等的供电;HCU控制板实现对ROV本体上补偿器液位传感器、电机绕组温度传感器和水分检测传感器的供电和信息采集;灯控箱实现对照明灯组供电和调光控制,单个灯控箱最多可以独立控制14 路照明灯;科考POD实现对CTD、旋转取样器、微生物取样器、气密取样器及扩展系统2等供电。
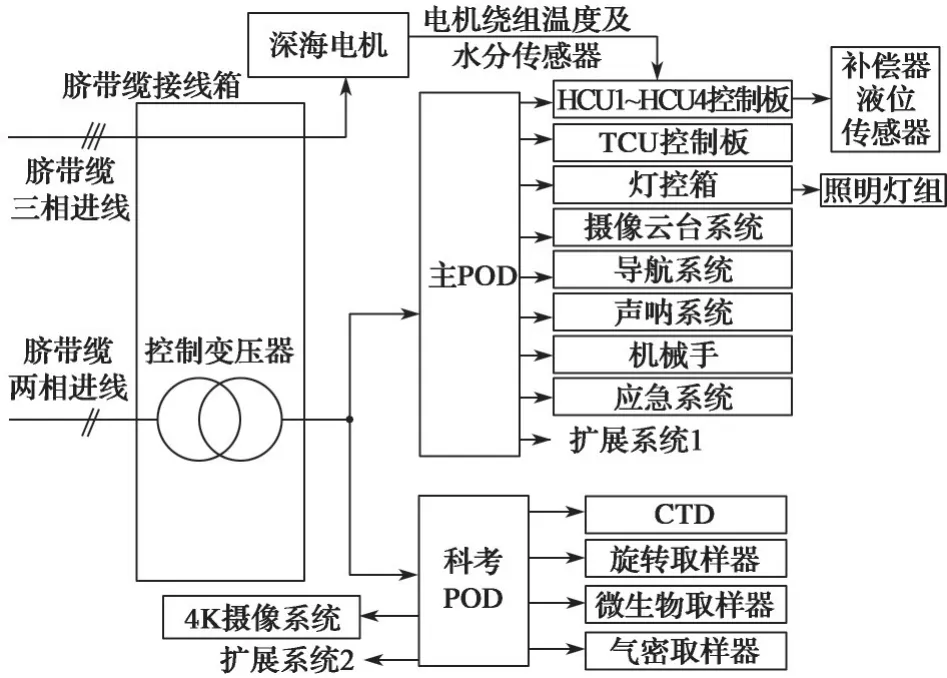
图8 ROV 本体电气系统框图Fig.8 Block diagram of ROV electrical system
摄像云台系统通常由2 个上下布置的云台、多个定焦、变焦、彩色、黑白、低照度及高清相机组成,每个云台可以左右分别配1个标清定焦或黑白低照度相机以及1个变焦高清或4K相机,实现水平旋转和垂直转动,并且各相机配置1路可调光照明灯,进行拍摄效果调整。
导航系统通常由光纤惯导、多普勒测量仪DVL和深度计的组合,也可再另配置高度计、深度计及水下罗盘等作为备用导航设置,实现自动定深、定高和定向控制。
声呐系统通常由避障声呐实现飞行避障,可以根据作业需要配置多波速、侧扫仪及浅剖仪等实现水底地貌、地形的探测扫描。
应急系统通常有定位USBL声信标、水面无线电、GNSS 电信标和频闪光信标,可实现水下ROV 的定位和搜救,搜寻信号一般可保持7天。
2.3.3 ROV水下质量分析及布局
ROV 本体由浮力材料、结构系统(包括框架吊点及保护套等)、液压系统、电气系统、搭载设备组成。本文研究通过分别统计分析各组成部分的空气中质量、水中质量、重心及布局坐标,来获取ROV 本体的空气中质量、水中质量、重心和浮心,从而分析ROV的稳定性;并根据ROV 本体质量、载荷能力、搭载能力、功能要求及运动性能等约束条件来对各组成部件的布局和质量提出要求,再对整体布局和结构进行优化。表3是根据科考ROV 搭载要求展开的重力分析,ROV 本体空气中质量达到4 563 kg,海水中质量为-3 kg,采用277 kg铅块配平,铅块数量28块,即在除去机械手、惯导及标配系统后还具备水下250 kg以上的搭载能力。

表3 ROV 质量分析Tab. 3 ROV weight analysis
作业级科考ROV布局,如图9所示[9],其中摄像云台、导航系统、声呐系统、应急系统等的布局根据功能要求进行,推进器的布局根据流体设计进行,其他液压系统和电气系统部件的布局根据重心和可维护性进行。如在ROV顶部布置相机和照明灯用于观察脐带缆状态;在ROV前方顶部布置1组强光灯以照亮正前方摄像视野;在顶部布局频闪信标、无线信标及USBL信标便于搜寻;在底部布置集成DVL惯导和高度计用于对地速度和高度的测量。

图9 作业级科考ROV 布局Fig.9 Layout of scientific work-class ROV
2.4 组合多功能科考作业工具系统
深海科考型ROV 作业工具是高效展开深海样品采集和试验的有力保障。根据深海科考作业要求可以设计不同的作业工具。本ROV 系统采用科考作业底盘,用于常规作业工具和扩展作业工具搭载。如图10所示,作业底盘采用AL6082-T6铝合金型材框架,镂空轻量化设计,左右各配置七功能主从控制液压机械手,集成12 位旋转取样器、生物取样箱、表层沉积物取样器、宏生物取样器,搭载沉积物取样器、气密流体取样器和微生物取样器等。另外科考作业还需配置采水瓶取样器和CTD系统。ROV操作员可以根据科考作业要求,控制机械手和采样试验工具,在深海完成既定的科考任务。

图10 作业底盘Fig.10 Tool SKID
3 工程研制及应用验证
基于以上设计方案,上海中车艾森迪海洋装备有限公司展开了深海科考型ROV成套系统的研制,分别完成A 架、绞车、HPU、CC 及ROV 本体及作业底盘工程化产品,打造了“开拓者”号后浪01 型工作级ROV,如图11所示。该系统的开发应用了上百家供应商的产品,分别展开了单体部件级测试、子系统级测试和整机测试,主要测试项点如表4所示,测试内容为成套系统功能验证和载荷测试,以满足海试条件[10]。其中灯控箱和阀箱PCB 等的耐压为65 MPa,即可满足6 000 m水深应用;绞车和A 架的动载和 静载取DNVGL、Lloyds 和IMCA 相关规范中的最大值[11-13]。如表5 所示,该系统在码头完成了成套系统的安装和调试;在南海某区域展开了深海系统性能和功能验证,并成功下潜至海底深度3 789 m,完成了各项海试内容,满足4 000 m级深海科考要求。

表4 ROV 系统测试主要验证项点Tab. 4 Main test items of ROV

表5 ROV 系统主要码头及海试项点Tab. 5 Main items of sea trial for ROV

图11 “开拓者”号后浪01 型ROV 本体Fig. 11 The Pioneer HOULANG01 ROV
在海试后,紧接着在海马冷泉执行深海生态系统科学考察任务,在9天内完成8个潜次,累计水下作业时间超43 h,展开了生物、表层泥土、深沉泥土及水取样,水环境温盐深和甲烷测量,以及海底培养和迁移试验,取得了大量的生物和沉积物样品、定点海水、高清影像及调查数据等,如图12~图15所示,充分证明了该深海科考型ROV的可用性。
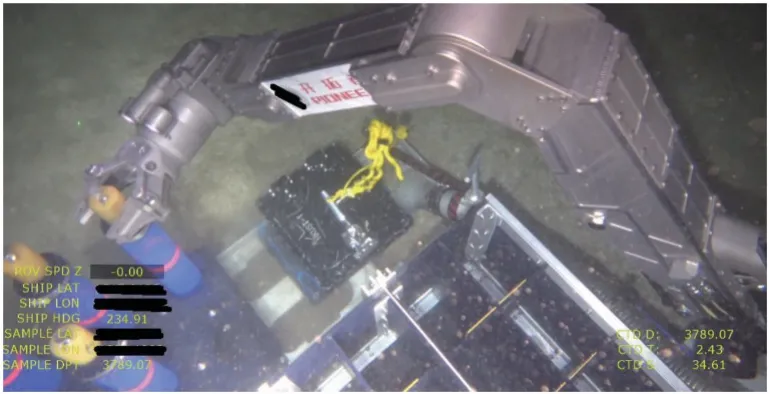
图12 “开拓者”号坐底3 789 m Fig. 12 The Pioneer on 3 789 m seabed
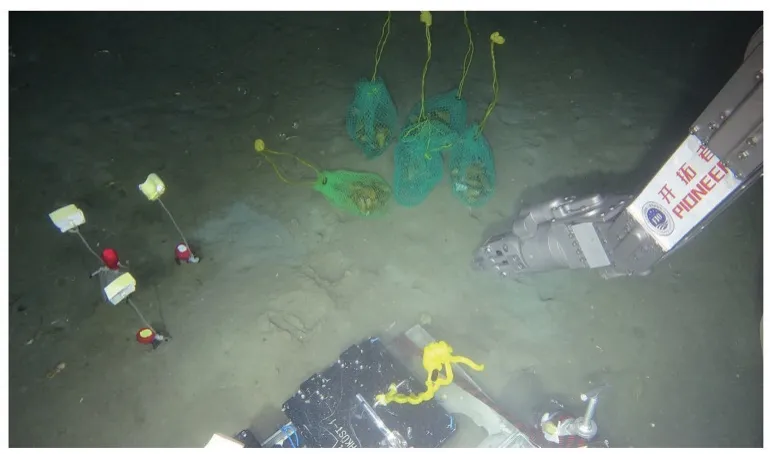
图13 “开拓者”号海底贻贝培养Fig. 13 Culture mussel on seabed by the Pioneer

图14 ROV 表层沉积物和宏生物取样Fig. 14 ROV surficial sediment and macroorganism sampling

图15 ROV 海底生物诱捕及培养Fig. 15 Submarine biological trapping and culture with ROV
4 结束语
本文总体展示深海科考重型ROV 成套系统中的收放系统、控制系统、ROV 本体及作业系统在科考方面的关键研制内容和方案。在该研制过程中,通过自主可控供应链开发,避免关键技术受制于人,完成了系统工程化开发,并通过出厂测试、海试及科考作业检验了系统功能和性能,验证了该4 000 m 深海科考重型ROV 系统和关键零部件的可靠性;同时,拉通了国内深海装备产业链,实现了关键部件的自主可控及工程化应用。本深海重型ROV成套系统是立足工程化应用开发的,不仅可以应用在深海科考方面,还可以广泛应用在油气、打捞及电力敷设等方面,其阀控单元、灯控箱及框架本体等关键技术可被更深(至6 000 m)、更大功率及挖沟敷缆采矿等作业机器人应用,将为我国高效、安全、可靠地探索海洋、开发海洋提供有力的装备支撑。为了后续提升ROV 系统效能、减小水下噪声和提高其对水下生物环境的友好性,可以进一步对高效、重型电驱型ROV系统展开研究。
猜你喜欢
军事文摘(2023年18期)2023-11-03
现代制造技术与装备(2021年9期)2021-04-03
军事文摘(2020年22期)2021-01-04
少儿美术(快乐历史地理)(2020年7期)2020-11-26
通信电源技术(2018年5期)2018-08-23
同煤科技(2015年4期)2015-08-21
中国修船(2014年5期)2014-12-18
中国西部(2014年3期)2014-08-04
组合机床与自动化加工技术(2014年12期)2014-03-01
河南科技(2014年24期)2014-02-27