遥控水下机器人用高压直流变换系统及其控制策略
2024-01-09 07:06陈志鹏
控制与信息技术 2023年6期
陈志鹏
(中国华电集团物资有限公司,北京 100032)
0 引言
遥控水下机器人(remotely operated vehicle,ROV)是当今人类探索海洋环境和开发海洋资源的有力工具之一。随着应用领域的不断扩大,ROV 也向着工作深度越深、推进动力越大、作业能力越强的方向发展。ROV(特别是作业级ROV)所需的电源基本由船面供电装置通过长距离脐带缆输送,而高压直流输电方式具备长距离传输电能损失小且ROV 水下电能变换设备体积小等优势,因此在ROV远程供电方面具有很好的应用前景[1-4]。ROV 结构紧凑,内部推进器、电动工具等电气部件需要采用低压直流供电,同时受制于ROV高额维护和维修成本等因素,因此亟须一种体积小、重量轻、效率高、具备冗余功能的水下直流变换装置[5]。
飞跨电容型多电平直流变换器[4]利用飞跨电容器使各开关器件串联,可以降低对各开关器件的电压应力要求,且无须对变压器进行隔离,非常适合水下紧凑的应用环境。作业级ROV要求高压直流变换系统供电功率大、可靠性高,因此适合多个高压直流变换器并联和冗余工作。文献[6]~文献[10]介绍了一种输出电压与飞跨电容器电压解耦的控制方式,可以在实现输出电压闭环控制的基础上,保证各飞跨电容器的均压控制,但未涉及多变换器并联工作的情况。文献[11]和文献[12]提出了并联三电平直流变换器方案,其通过限压恒流控制策略实现系统控制,但对更多电平直流变换器的控制过于复杂。
本文根据作业级ROV 对高压直流变换系统的要求,建立了高可靠性的多变换器并联的系统拓扑,设计了一种基于EtherCAT 通信总线的多电平直流降压变换器控制方法,保证了模块内串联工作器件的均压性和并联工作模块的均流性,并且适用于冗余工作模式;最后给出试验结果,验证了本方法的有效性。
1 高压直流变换系统
基于作业级ROV 对供电装置的供电功率大和可靠性高的要求,水下直流变换器采用多个(本文以4个为例)直流变换模块并联工作的冗余结构(图1)。所有模块通过开关与来自水面的高压直流电缆相连,各模块分别将直流高压转换为直流低压,并通过开关连接至直流母线,为水下机器人内各电气部件提供电源。另外,各直流变换模块通过EtherCAT 总线互相联系,实现模块的并联控制。

图1 水下直流变换系统并联冗余拓扑Fig.1 Parallel topology of underwater DC converter system
直流变换模块既能组合在一起提供总功率转换,也可以单独运行提供单个功率转换。正常运行时,N个直流变换模块并联向负载供电,每个直流变换模块平均负担负载电流。当其中某一个或k(k≤N)个直流变换模块出现故障时,通过断开相应的输入和输出开关,自行退出供电,而剩下的(N-k)个直流变换模块继续向负载提供电流,水下机器人根据冗余模块数量正常工作或降额工作。即使在最极端的情况即(N-1)个直流变换模块出现故障时,水下机器人仍能通过1 个模块的供电实现回收。
2 高压直流变换器拓扑
水下直流降压变换装置各模块采用输入、输出共地的多电平直流斩波(Buck)串联拓扑(图2)。这样,不仅可以降低对器件的应力要求,减小滤波器件容量,极大地提高功率密度和模块效率,同时还满足了水下机器人电气系统水下绝缘监测和接地保护对输入、输出共地的要求。
直流降压变换器主要包括p个串联的Buck 基本单元[13]、滤波器、Crowbar 过压保护单元、输入和输出测量单元以及控制器。
Buck单元是变换器的基本单元,其由飞跨电容器Ck(k= 1, 2, …,p-1)、开关管Qt(t= 1, 2, …,p)以及二极管Dt等构成。开关管Qt和二极管Dt交错互补导通。p个开关管导通的相位依次相差2π/p,当全部开关管的占空比d相同时,飞跨电容Ck的电压为k×Vin/p。当开关管Qt或二极管Dt关断时,其所受的电压应力是相邻飞跨电容器电压VCk的差,即VDt=VQt=VCk-VC(k-1)=Vin/p。
滤波器由滤波电感器和电容器组成,用于滤除多电平Buck电路输出电压的高次谐波。
Crowbar 保护电路包括稳压二极管、电阻器和晶闸管等器件。一旦直流变换模块输出电压超过限定值,稳压二极管就导通;当输出电压进一步上升超过稳压二极管的稳压值和晶闸管的开启电压时,可控硅开启,将输出电压拉低,以保护后端部件,使其不致因过压而损坏。
控制器及输入、输出测量部分,根据输入、输出的电压和电流等参数对直流变换模块进行控制和保护等。
3 基于EtherCAT 通信总线的多电平控制方法
实际应用中,各开关管的开关特性无法完全一致,累积误差致使各飞跨电容器电压偏离正常范围,过高的电压会导致变换器系统保护动作甚至直接导致系统损坏;同时多个直流降压变换模块并联工作,会出现各模块电流不均衡的情况。为此,本文提出了一种兼具均压和环流控制的多电平直流降压变换器控制方法(图3)。
3.1 基于EtherCAT通信总线的均流控制
本系统采用EtherCAT 总线用于各直流变换模块间的通信。EtherCAT 是德国Beckhoff 公司开发的一种基于标准以太网的高速实时总线,具有网络拓扑灵活、数据传输高效、同步延时时间短等优点,大大提高了各通信设备数据传输速度和可靠性[14]。在通信网络中,每个并联的直流变换模块都有唯一的地址,每个正常工作的模块实时向其他模块发送自身的输出电流等信息,同时也接收并处理其他模块发送的信息。各模块分别计算所有模块的输出电流平均值Iavg,该值和本模块输出电流IO作差得到均流误差信号。误差信号经均流调节器得到电压调节信号VΔ,以对输出电压误差值进行修正,最终实现各直流变换模块输出电流的均衡。
并联系统中各模块通过EtherCAT 通信总线传递输出电流、运行状态等信息。当某模块发生故障则会自动退出运行,同时向EtherCAT 通信总线发送故障状态。其他模块则会调整平均电流计算,继续维持运行。基于EtherCAT 通信总线均流控制方法不仅具有均流精度高的优点,而且适应冗余工作模式。
具体计算流程如下:
1) 控制器实时采集输出直流电压值VO、输出直流电流值IO。
2) 每个直流变换模块向EtherCAT 通信总线发送自身的输出电流值;同时每个直流变换模块从EtherCAT通信总线接收其他模块的输出电流值,并与自身输出电流值相加,得到直流变换系统总电流值Isum,继而根据正常工作模块数,计算得到每个模块输出平均电流值Iavg。
3) 每个模块平均电流值Iavg和本模块输出电流IO相减,得到均流误差信号;并经均流调节器,得到电压调节信号VΔ。
4) 输出直流电压参考值VO_ref与反馈值VO相减得到的误差信号,并加上均流调节器输出信号VΔ,再经电压调节器后输出直流电流参考值IO_ref。
5) 输出直流电流参考值IO_ref与反馈值IO相减得到的误差信号,经过电流调节器,得到均流控制输出信号d,该控制信号用于3.2节中的均压控制。
3.2 基于电容电压解耦的多电平均压控制
将飞跨电容器电压的采集值VCm与参考值m×Vin/p(m=1, 2, …,p-1)分别进行比较并经电容电压调节器后,得到控制输出信号um(m=1, 2 ,…,p-1);再经解耦计算得到各开关管的占空比dt(t=1, 2, …,p),将其输出给直流降压变换器,来控制多电平直流变换器的正常工作。
具体计算流程如下:
1) 控制器实时采集输入直流电压值Vin、各飞跨电容器的电压值VCm(m=1, 2, …,p-1)。
2)飞跨电容电压的采集值VCm与参考值m×Vin/p(m= 1, 2, …,p-1)分别比较后经电容电压调节器得到误差信号,即控制输出信号um(m=1, 2, …,p-1)。
3) 误差信号向量u=[u1u2…up-1]T同解耦矩阵A1-1相乘后,即可得到1 至(p-1)个飞跨电容器均压控制微调值Δdm(m=1, 2, …,p-1)。
5) 将3.1 节均流控制输出值d分别与p个开关管的微调值Δdm(m=1, 2, …,p)相加,得到各开关管的占空比dt(t=1, 2, …,p),并将其输出给直流降压变换器,来控制多电平直流变换器的正常工作。
4 试验验证
为了验证本文所提高压直流变换系统及其控制方法的有效性,本文开发了50 kW 水下机器人用的高压直流变换系统样机。系统由两台25 kW 多电平高压直流变换器并联组成。高压输入电压为DC 4 000 V,输出电压为DC 680 V。
负载采用两并联支路功率电阻器,每支路电阻值分别为38 Ω,可以通过支路开关投切各组负载来测试负载突变时本系统的控制响应。启动测试时,投入一个支路电阻器,电阻值为38 Ω;运行过程中,投入另一支路电阻器,并联总电阻为19 Ω。
图4 为高压直流变换系统带负载启动过程波形。可以看出,整个启动过程平滑,变换器内各飞跨电容器电压均衡,电压偏差不超过10%;2个变换器的输出电流基本平衡,不平衡度小于5%。
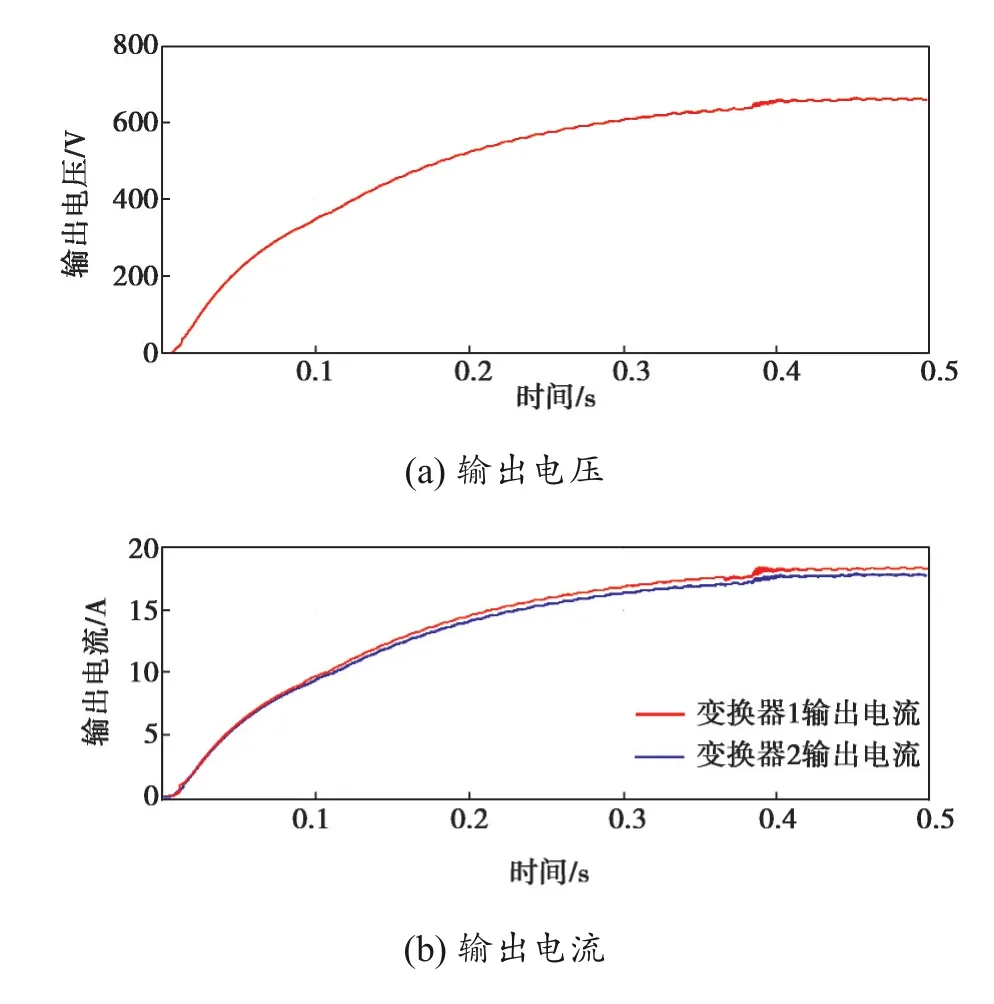
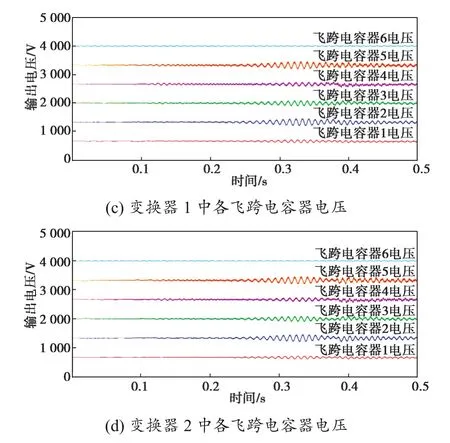
图4 2 台直流变换器并联启动过程波形Fig.4 Waveforms of two DC converters when starting
图5为高压直流变换系统运行过程中负载电阻突然投入工况下的波形。可以看出,负载投入后,输出电压短暂下降后再快速恢复,输出电压动态响应良好;变换器内各飞跨电容器电压基本维持动态均衡,电压偏差不超过10%;2个变换器的输出电流基本一致,不平衡度小于5%,具有良好的功率均衡。
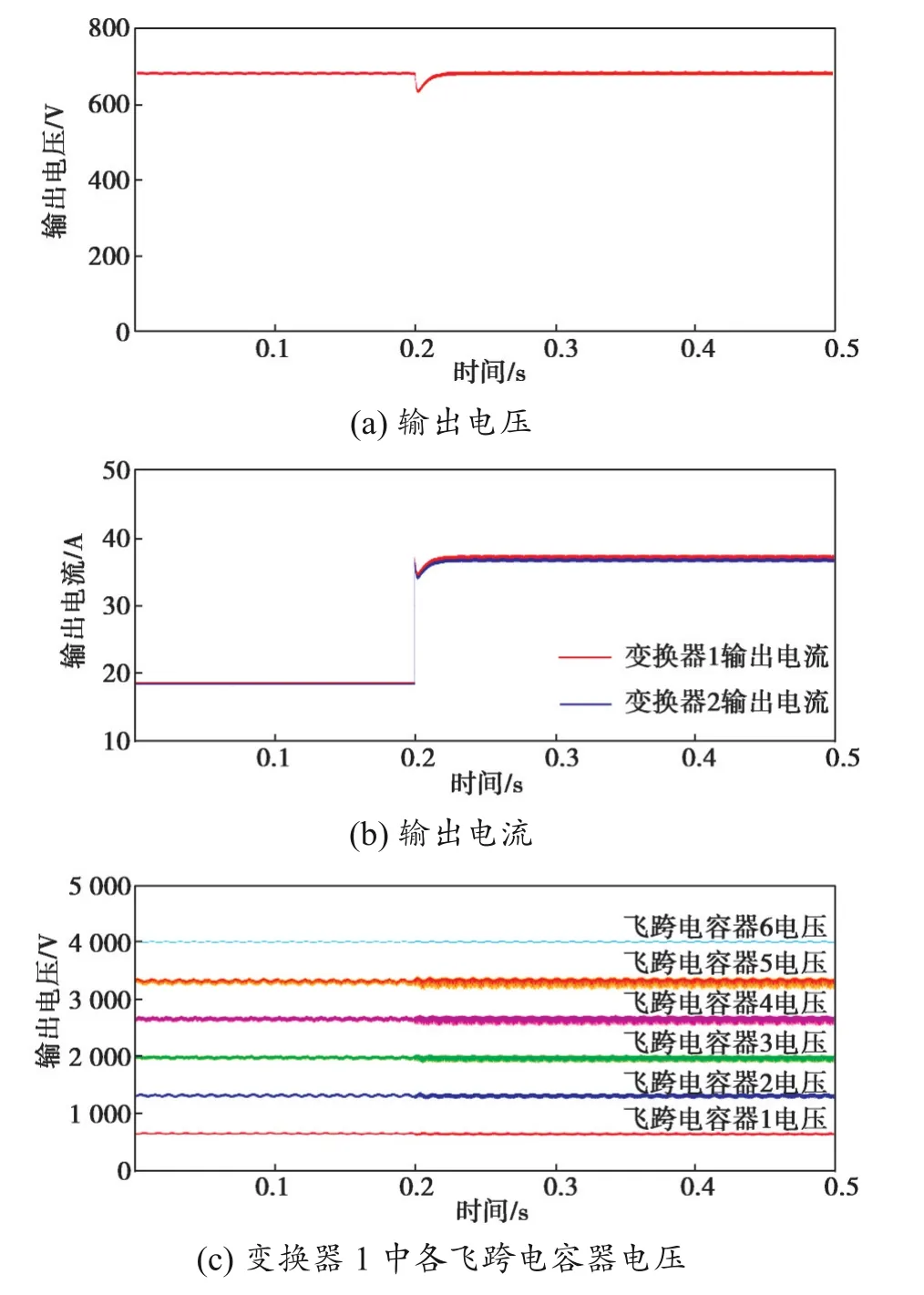
图5 2 台直流变换器并联运行过程波形Fig.5 Waveforms of two DC converters when running
5 结束语
本文针对作业级水下机器人供电功率大和可靠性高的要求,设计了一种基于多电平飞跨电容拓扑的多变换器并联冗余的系统;提出了一种基于EtherCAT通信总线的控制方法,同时保证了模块内串联器件的均压性及并联模块的均流性,并且适用于冗余工作模式。采用该方法有效提高了水下直流变换系统的功率扩展和冗余运行能力,可以为水下机器人提供稳定可靠的供电能源。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
物理之友(2020年12期)2020-07-16
电子制作(2019年22期)2020-01-14
山东冶金(2019年5期)2019-11-16
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年6期)2016-04-20
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年22期)2016-04-12
通信电源技术(2016年5期)2016-03-22
电子工业专用设备(2015年4期)2015-05-26