消费型无人机在带状区域控制点布设精度研究
2024-01-30 02:16陈天福
江西测绘 2023年4期
陈天福
(江西核工业测绘院集团有限公司 江西 南昌 330199)
1 引言
近几年来,无人机摄影测量技术快速发展,成为获取高分辨率影像的主要方法,该方法具有成本低、效率高、获取影像纹理信息丰富等特点,在城市实景三维建设、农村宅基地确权、地理国情调查、工程建设等邻域得到广泛的应用[1−4]。
在水路线状测绘工程邻域,常用测量方法主要包括RTK 技术、传统无人机摄影测量技术等。文献[5]采用传统的RTK 技术进行水流线路碎部点采集工作,需要利用建立移动站与基准站间信号通信,测量成果受通信质量影响较大且作业效率低、工作量大,影响工程进度。为了提高作业效率,采用传统的摄影测量方式进行数据采集工作。文献[6]提出倾斜摄影测量在河流综合治理中的应用方法,该方法能够获取河道周边实景三维模型,能够清楚展现河道周围地形地貌信息。文献[7]和文献[8]提出无人机PPK 技术支持下的河道测量方法,该方法利用高精度的POS 数据进行辅助空中三角测量,为高精度测绘产品的生产提高保障。为了获取带状区域高精度测绘产品,通常需要采用在测区布设外业相控点的方法确保测绘成果的产品精度,但对于带状区域控制点布设方案的相关研究成果较少。
鉴于此,本文提出消费型无人机在带状区域控制点布设精度研究。首先,利用消费型无人机飞马D200 获取带状区域的多视影像数据,并外业采集控制点数据用于空三处理与成果精度验证;然后,设计不同像控点布设方案,通过外业点验证不同像控点布设方案下空三成果、DOM 和DEM 成果精度;最后,给出适应带状区域像控点布设方案,为相关工程建设提供一种思路。
2 消费型无人机摄影测量关键技术
消费型无人机摄影测量的基本原理是利用消费型无人机搭载多镜头相机进行数据采集,以获取高分辨率多视影像数据,将不同视角的多视影像数据叠合在一起对地形成多度重叠区域,利用影像外方位元素恢复影像曝光时刻相机的空间几何关系,结合地面控制点,实现测绘区域三维场景的建模。最后,利用外业控制点验证工程成果精度。消费型无人机在带状区域像控点布设方案的数据处理流程如图1所示。

图1 数据处理流程
3 工程实例
为了验证不同控制点布设方案对摄影获取多视影像数据生成成果精度影响,文中选用工程线路长约11km,宽度为中心线两侧各500m,总面积为11km2。整个测区地势平坦,高差变化较小。但测区长度较长,采用传统的摄影测量布点方式,不但要增加像控点数量,而且实施起来比较困难。为了提高工程效率,本文利用飞马V100无人机进行带状区域像控点布设方案试验。
3.1 影像数据的获取
为了获取多视影像数据,选用飞马V100 垂起固定翼摄影测量平台搭载SONY RX1R II 相机进行多视影像数据采集工作。为了获取地面分辨率优于0.07m 分辨率的高分辨率遥感影像设计飞行为相对航高540m,航向重叠度80%、旁向重叠度60%,配套的基站进行2 个架次航摄。飞马V100 无人机及航摄参数如表1所示。

表1 数据源参数
3.2 像控点布设方案
像控点布设的基本原则为:硬质路面采用L 形布设,大小为长*宽(70cm*30cm),非硬质路面采用十字形,大小为:长*宽(130cm*30cm)。像控点位置周围环境空旷,地表起伏小。为验证像控点密度对多视影像数据的成果精度影响,设计三套布设方案,采用GPS RTK 共采集37 个控制点,控制点位置如图2所示。

图2 控制点布设方案
(1)布设方案I:在带状区域周边布设像控点,平均1.0km−1.5km 布设一对像控点,航摄区域拐点处加设像控点。图2 中,采用A1 至A22 共22 个点进行空三刺点,X1至X15共15个点进行检查。
(2)布设方案II:图2中,带状航摄区域在A7、A8点处存在拐点,考虑区域形状,选取A1、A2、A7、A8、A11、A12、A15、A17、A21 和A22 共10 个点进行空三刺点,这10个点的排布为平均2.5km−3.0km 一对,其余点进行检查。
(3)布设方案III:不考虑带状区域形状,选取A1、A2、A11、A14、A21 和A22 共6 个点进行空三刺点,平均5.0km−6.0km一对,其余点进行检查。
3.3 航测数据处理
利用基站数据及飞行平台获取POS 数据进行PPK 解算,生成多视影像数据曝光时刻对应的姿态数据,用于多视影像匹配以及GPS 辅助光束法区域网平差。首先,PCI软件的Geomatica Banff 模块结合SRTM数据进行多视影像匹配,获取连接点坐标。然后,利用“Photoscan”软件的At 模块进行空三影像处理,消除不同立体模型间的接边误差,并将整个测区纠正到工程坐标系下。最后,利用Smart3D 软件的多视影像密集匹配方法生成DSM数据与DOM 数据。通过试验,本工程采用平均2.5km−3.0km 布设一对像控点,大大地减少了像控点的布设数量,提高了工作效率。部分成果如图3所示:

图3 成果数据
3.4 精度分析
为了验证不同像控点布设方案对生成成果精度的影响,文中对比分析不同布设方案下空三成果、DOM和DEM的成果精度。
3.4.1 空三成果精度
空三区域网平差后的检查点的精度是通过使用GPS RTK 实测的点与对于立体像对同名像点坐标经过前方交会计算获取的坐标值对比分析得到,中误差坐标统计结果根据式(1)求出:
其中:m为检查点的中误差;Δi为检查点实测值与解算值的差;n为检查点的个数。不同布设方案的检查点精度如表2所示。

表2 不同布设方案的检查点精度
由表2 可知:不同布设方案的空三检查点平面最大较差及中误差方案Ⅰ最小,但随着方案Ⅱ、方案Ⅲ像控点的减少,平面中误差变化不大。不同布设方案下空三检查点的高程精度随着像控点数量的减少其最大较差依次增大,但高程中误差方案Ⅰ与方案Ⅱ精度相当,都明显高于方案Ⅲ。三种不同的布设方案空三检查点的精度都满足1∶1000比例尺要求。
3.4.2 DOM精度对比
DOM 的精度是通过野外实测检查点与DOM 上提取的检查点的坐标差值,按式(2)确定:
式中:Ms为平面中误差,ΔPi为i点的平面中误差,n为检查点个数。为了验证不同布设方案的DOM 精度,在试验区内均匀分布地采集了100 个检查点,其精度如表3所示。
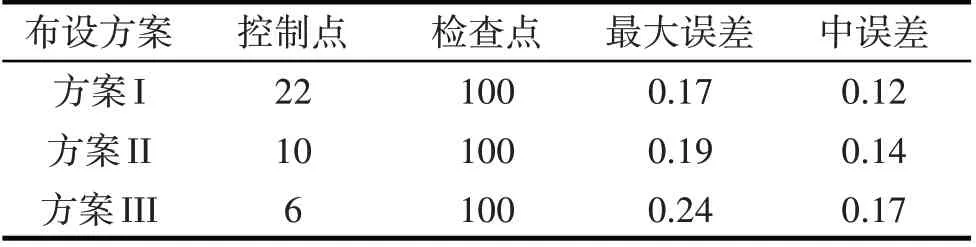
表3 不同布设方案的DOM精度
由表3可知:不同布设方案的DOM精度相当,虽然方案Ⅰ的精度最高,但随着方案Ⅱ、方案Ⅲ像控点数量的减少精度影响不大,这是由于在空三自由网时通过模型间足够多的连接点确保区域误差分布一致,利用少量控制点能够将平原地形局部误差控制在规范指标要求内。
3.4.3 DEM精度对比
DEM 的精度是通过野外实测检查点的高程,然后利用ArcGIS 软件提取对应检查点在DEM 上的高程值,实测高程值与提取高程值的差值,按式(3)确定:
式中:MH为高程中误差,Δhi为点的实测值与DEM 对应该点高程值的差值,n为检查点个数。为了验证不同布设方案的DEM 精度,在试验区内均匀分布地采集了220个检查点,其精度如表4所示:

表4 不同布设方案的DEM精度
由表4可知:方案Ⅰ与方案Ⅱ的DEM 精度相当,明显高于方案Ⅲ的精度。在方案Ⅰ(平均1.0 km −1.5 km 布设一对像控点)的基础上适当增大像控点布设距离,使其平均2.5 km −3.0 km(方案Ⅱ)布设一对,对DEM 的精度影响较小。但像控点的布设距离也不宜过大,方案Ⅲ是平均5.0 km −6.0 km 布设一对像控点,DEM 精度已经明显降低。方案Ⅰ、方案Ⅱ、方案Ⅲ满足规范中规定的1:1000 二级DEM 精度指标,但方案Ⅲ已接近限差。
通过上述DOM、DEM 的精度对比分析可知,在带状平原地区,方案Ⅱ可有效地满足其1∶1000 各项精度指标,且DEM精度较优。
4 结束语
本项目采用飞马V100 垂起无人机,探讨不同布设方案情况下生成DOM、DSM 的成果精度。试验结论如下:选用2.5 km −3.0 km 布设一对像控点,在拐角处加密像控点的布设,其成果满足精度要求,且节省外业工作量及内业空三加密工作,可供其他工程借鉴。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
小学科学(学生版)(2019年4期)2019-05-11
国际呼吸杂志(2019年4期)2019-03-12
知识经济·中国直销(2017年11期)2017-11-28
北京航空航天大学学报(2017年4期)2017-11-23
商情(2017年9期)2017-04-29
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
现代计算机(2015年31期)2015-09-28