面向海流反演的多普勒散射计天线转速优化方法*
2024-02-28 11:46孙伟峰范陈清戴永寿
中国海洋大学学报(自然科学版) 2024年3期
孙伟峰, 李 雯, 范陈清, 贾 晨, 戴永寿
(1. 中国石油大学(华东)海洋与空间信息学院, 山东 青岛 266580; 2. 自然资源部第一海洋研究所遥感室, 山东 青岛 266061)
海洋表面流是航海、渔业等海洋工程应用及全球气候变化研究的基础,其观测和预报受到越来越多的关注[1]。多普勒散射计(Doppler Scatterometer,DopScat)是一种测量海面风场和流场的新型真实孔径雷达[2],采用笔形波束旋转扫描体制,有具有不同的入射角和极化方式的内、外两个波束。随着卫星平台的不断运动及天线的快速旋转,DopScat具有宽刈幅、多方位角观测[3]和单部雷达即可实现全球海表面矢量流快速覆盖的优势。注意到,DopScat天线的旋转扫描速度对海流的反演性能具有重要的影响[4]。表1给出了当今主流星载微波散射计的天线转速信息[5-7]。可见,在不同的应用场景下,散射计所采用的天线转速也不相同。当对海流进行观测时,散射计天线转速过快,部分目标海面无法被雷达波束所覆盖,存在观测盲区;天线转速过慢,同一目标海面被雷达波束覆盖次数较少,利用不同观测方位向下的径向流合成矢量流时,由卫星姿态[8]等引起的径向速度误差对海流反演精度影响较大,导致海流反演精度较低。
2015年鲍青柳[9]指出天线转速的选择须满足雷达足印对海洋表面的连续覆盖,避免出现覆盖盲区。2017年王刚等人[10]研究发现,随着天线旋转速度的增大,天线扫描损失也逐渐增大,因此,在系统仿真中必须考虑天线扫描损失的影响。同年,董晓龙团队基于Ku波段多普勒散射计模型,提出了基于极大似然估计的多普勒散射计海流反演方法,在天线转速为18 r·min-1时,利用海洋表面流实时分析(Ocean Surface Current Analyses Real-time,OSCAR)数据进行了海流反演实验,实验结果表明海流反演精度可达0.18 m·s-1[11]。此外,在ISAR成像领域,朱燕丽等[12]根据天线转速对ISAR成像的影响,建立了使方位角分辨率值最小的天线转速优化模型,但该模型在DopScat海流反演中并不适用。
通过研究DopScat天线转速的选择及优化工作(见表1)发现,利用现有方法优化得到的天线转速进行海流反演,反演精度仍未满足海洋工程应用及全球气候变化研究对海流流速、流向分别为0.1 m·s-1、20°的测量精度要求。因此,本文提出了一种面向海流反演的多条件约束天线转速优化方法。以研究区域内被天线波束覆盖3次或者4次的目标海面数量为目标函数,以顺轨与交轨方向的波束足印连续性、空间分辨率要求作为约束条件,结合天线转速与天线扫描损耗的关系,建立非线性约束下的多普勒散射计天线转速优化模型,利用优化得到的天线转速计算得到每个目标海面的观测方位向组合。利用OSCAR海流数据,采用基于观测方位向优选的矢量流合成方法[10]估计海面流场。
1 多普勒散射计海流观测原理
为了实现宽刈幅、多方位角观测和快速无间隙全球覆盖,DopScat采用内、外两个笔形波束旋转扫描进行海流观测[14]。设卫星平台轨道高度为H,DopScat沿着轨道运行的同时,其天线以ra的旋转速率进行旋转扫描,其观测几何如图1所示。其中,vsat表示卫星平台的飞行速度,θ表示DopScat观测海流的入射角,R表示天线足印中心到星下点的距离,φ表示在观测时间t时,由于卫星运动及天线旋转,雷达天线波束指向在地面的投影与雷达运动方向的夹角,即观测方位向。DopScat具体参数指标[9-10,15]如表2所示。

图1 多普勒散射计海流观测示意图

表2 系统仿真参数
如图1所示,DopScat向海面发射电磁波信号,与海面发生相互作用产生Bragg散射,散射的一部分电磁波将作为回波被DopScat接收。将接收到的电磁波信号与发射的电磁波信号进行混频,通过滤波等前端处理后得到中频信号,对中频信号进行回波功率谱估计,通过谱峰检测提取由海流引起的多普勒频移[16]。
由多普勒频移及多普勒效应可知,海流径向流速Vr与多普勒频移fd之间的关系[17]可以表示为:
(1)
其中,λ表示电磁波波长。
令研究区域内总目标海面数量为N,每一个目标海面可以为Pi(i=1,2…,N),多普勒散射计S对目标海面P1进行观测时的几何结构如图2所示。其中,V表示目标点处的海表矢量流速,Vr表示雷达与目标间的相对径向速度,Vr′表示目标点处海表矢量流速V在观测方位向φ上的分量,η表示海流流向φcur与观测方位向φ之间的夹角。由空间投影关系可知,V、Vr与Vr′之间满足如下关系式[13]:

图2 多普勒散射计海流观测几何示意图
(2)
在不同的天线转速下,DopScat发射电磁波波束足印对同一目标海面的覆盖次数不同,观测方位向也不同。由公式(1)可以计算得到海流在不同观测方位向下的径向流速;利用两个及以上不同观测方位向下的径向流速,由公式(2),通过矢量流合成的方法计算得到矢量流场。
2 多条件约束的DopScat天线转速优化
随着卫星平台的运动和笔形波束的旋转扫描,在内波束刈幅范围的同一目标海面最多可以被散射计内、外波束的前、后视观测四次,内波束刈幅和外波束刈幅之间的目标海面最多可以被散射计外波束前、后视观测两次[18]。为了使DopScat发射的电磁波波束在海洋表面的足印覆盖到大多数的目标海面,避免出现覆盖盲区,必须要考虑雷达足印在海洋表面顺轨方向与扫描方向的连续覆盖[9,19]。由DopScat天线发射内、外波束在海洋表面的足印连续性约束条件可以确定内、外波束天线转速范围分别为18~1 147 r·min-1,15.1~953.2 r·min-1。为了同时满足天线内、外波束足印扫描的连续性,天线转速约束范围应为18~953.2 r·min-1。
在满足天线足印快速无间隙全球覆盖的同时,也要满足海流反演对空间分辨率的要求。海洋工程应用及全球气候变化研究要求海流观测空间分辨率高于50 km[6]。空间分辨率包括距离向分辨率和方位向分辨率,距离向分辨率主要受脉冲信号宽度影响,在脉冲信号宽度为4 MHz时,雷达的距离向分辨率为50 km。方位向分辨率与时间-带宽积(Time Bandwidth Product, TBP)有关,而TBP由天线转速决定。方位向分辨率可以表示为:
(3)
由公式(3)可知,为满足海流观测50 km×50 km的空间分辨率要求,天线转速应低于173 r·min-1。因此,结合天线足印覆盖连续性约束与空间分辨率要求,天线转速约束范围为18~173 r·min-1。
另外,由于DopScat的天线口径更大,雷达的距离向足印宽度较小,为了满足星下点轨迹的全覆盖,天线转速比风场测量笔形波束扫描雷达散射计更快,天线扫描损耗也更严重[9],而该损耗会降低信噪比,从而影响海流的反演精度。因此,在系统仿真时必须考虑天线扫描损耗。由文献[20]给出的天线扫描损耗与天线转速的关系图可知,随着天线转速的增大,天线扫描损耗逐渐变大,那么信噪比就越低,导致海流反演精度低。因此,在满足天线波束足印连续性的约束条件下,应尽可能选择较小的天线转速。
DopScat天线转速不同时,雷达对同一目标海面的观测次数也不同,采用矢量流合成的方法进行海流反演时至少需要两个观测方位向的径向流,而采用不同的径向流合成矢量流时,由卫星姿态误差等引起的径向速度误差对海流反演的影响不同。本节通过分析天线转速对海流反演精度的影响规律,提出了一种新的天线转速优化方法,在天线转速最优时,利用最优观测方位向下的径向流合成矢量流,提高海流反演精度。
2.1 天线转速对海流反演精度的影响规律分析
对于内波束刈幅范围内的同一目标海面,最多可实现内、外波束四个不同观测方位向的观测。天线转速不同,雷达足印对同一目标海面的覆盖次数也不同。如图3所示,该图为在不同的天线转速下,雷达足印对同一目标海面覆盖2、3和4次时,利用两个不同观测方位向下的径向流进行矢量流合成的示意图。假设在目标海面P1处,矢量流的流速大小为V、流向为φcur,流速V在四个观测方位向上的投影分量分别为VR1、VR2、VR3、VR4,不同观测方位向组合下的矢量流合成流速分别为V1、V2、V3、V4、V5、V6,流向分别为φ1、φ2、φ3、φ4、φ5、φ6,箭头的长度和方向分别表示合成矢量流速的大小和流向。由于每个观测方位向对应的径向速度误差差异不大,为了简单起见,本文假设了不同的观测方位向具有恒定的径向速度误差ΔVR。
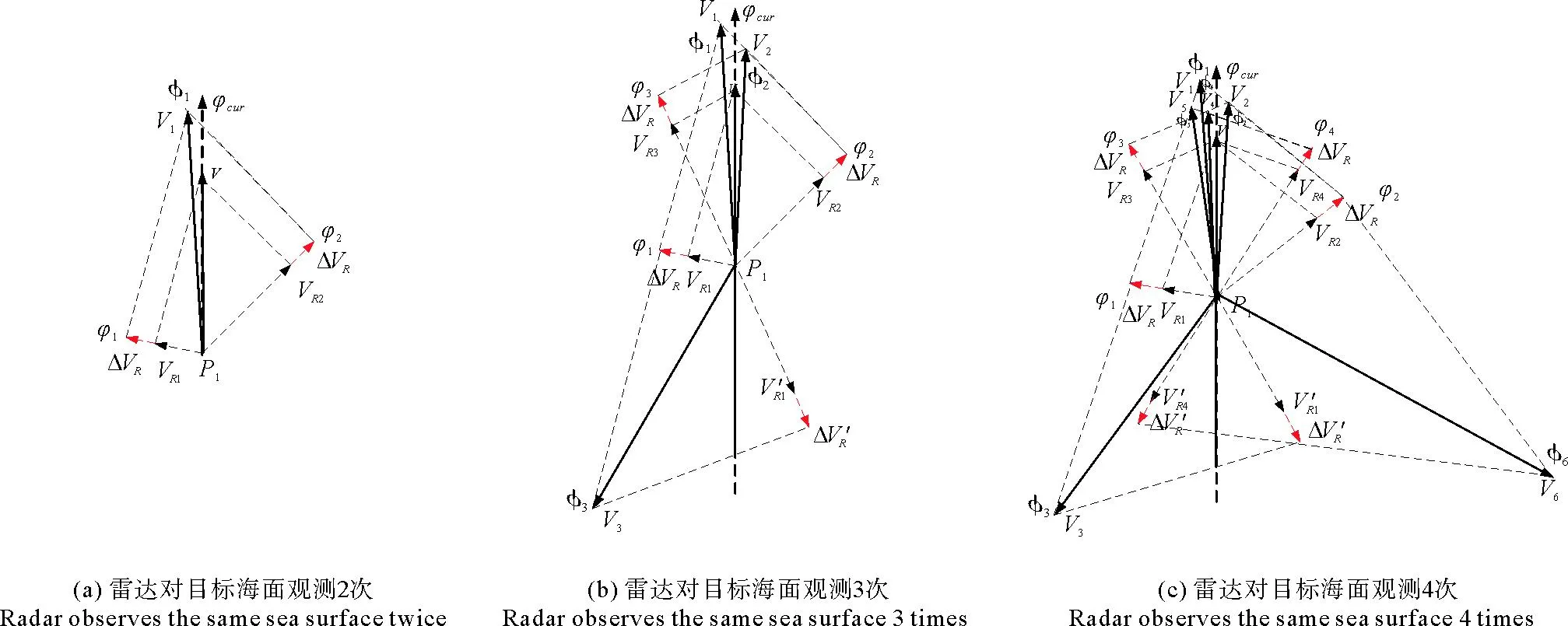
图3 观测次数不同时矢量流流速合成示意图
从图3(a)中可以看出,在一定的天线转速下,雷达足印对目标海面仅覆盖2次,观测方位向为别为φ1、φ2,利用两观测方位向下的径向速度合成矢量流流速、流向分别为V1、φ1;图3(b)是在一定天线转速下,雷达足印对目标海面覆盖到3次时进行矢量流合成结果,观测方位向分别为φ1、φ2、φ3,将3个方位向下的径向速度分别组合进行矢量合成,得到不同观测方位向组合下的矢量流速分别为V1、V2和V3,流向分别为φ1、φ2、φ3,可以发现在观测方位向为φ2、φ3时,得到的海流矢量流速V2、流向φ2更接近真实海流流速、流向,并且比图3(a)仅用两个观测方位向得到的海流矢量流反演精度高;图3(c)是在一定的天线转速下,雷达足印对目标海面覆盖到4次时矢量流合成结果,观测方位向分别为φ1、φ2、φ3、φ4,将4个方位向下的径向速度分别组合进行矢量合成,得到不同观测方位向组合下的矢量流速分别为V1、V2、V3、V4、V5、V6,流向分别为φ1、φ2、φ3、φ4、φ5、φ6,可以发现在观测方位向为φ3、φ4时,得到的海流矢量流速V4、流向φ4更接近真实海流流速、流向,相比于仅被观测2次和3次时的矢量合成流速、流向,海流反演精度得以提高。
因此,可以通过优化天线转速,使得同一目标海面可以被雷达足印覆盖的次数达到3次或者4次,选择最优的观测方位向组合来减小径向速度误差对海流反演的影响,提高海流的反演精度。
2.2 DopScat天线转速优化
根据天线转速对海流反演精度的影响规律分析,以增加雷达足印对目标海面的覆盖次数,选择最优的观测方位向组合来减小径向速度误差对海流反演影响为目标,本节提出了一种天线转速优化方法。如图1所示,随着平台的运动及天线的旋转,多普勒散射计以12 kHz的脉冲重复频率[9]向海面发射脉冲,雷达足印对海面进行连续覆盖。以内波束足印为例,在t0~t3时间段内,正侧视时,雷达足印对海面的覆盖如图4所示,其中,实线椭圆与虚线椭圆分别表示雷达外波束与内波束足印。

图4 正侧视足印覆盖示意图
天线转速不同时,雷达足印对目标海面的覆盖次数也不同。由图1与图4可知,内波束的足印运动轨迹与天线转速之间的关系可以表示为:
(4)
外波束的足印运动轨迹与天线转速之间的关系可以表示为:
(6)
其中:xin、xout分别表示内、外波束交轨方向的足印轨迹;yin、yout分别表示内、外波束顺轨方向的足印轨迹;Rin、Rout分别表示内、外波束的刈幅半径;t1′表示雷达足印从进入研究区域到覆盖到目标海面所用的时间。

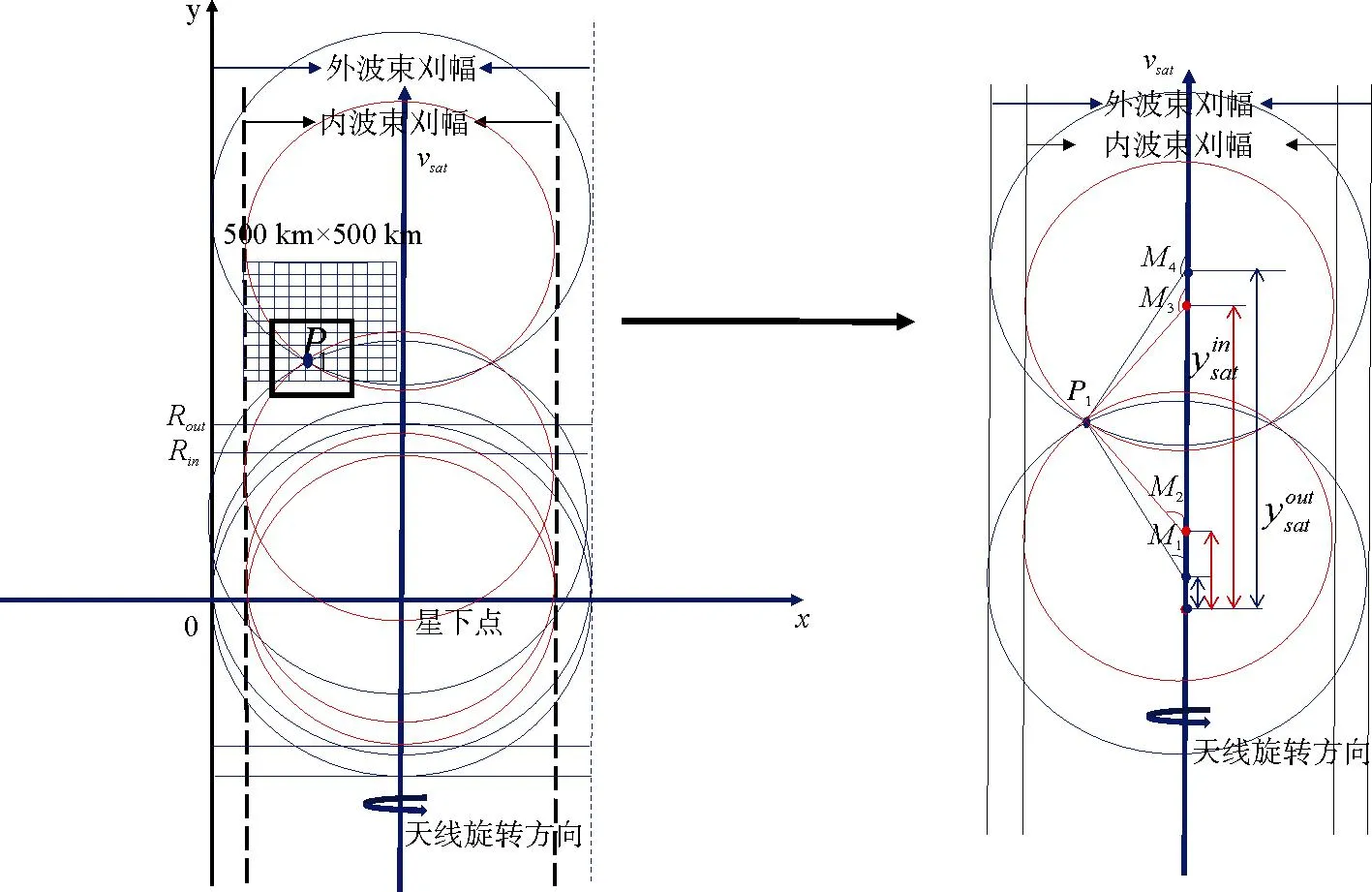
图5 目标海面P1的观测几何示意图
(6)
(7)
其中,t′、t″分别表示雷达 、外波束足印从进入研究区域到覆盖到目标海面所用的时间。
联立公式(4)—(7),DopScat天线内、外波束足印覆盖到目标海面时的观测方位向可以分别表示为:
(8)
(9)
其中,(xobj,yobj)表示雷达足印覆盖到观测目标海面P时对应的目标海面的几何位置。不同的天线转速下,内、外波束足印覆盖到目标海面时的观测方位向φin、φout的取值均可能有0、1或2个,即对于同一目标海面,内、外波束足印覆盖到目标海面时总的观测方位向个数可能为0、1、2、3或4个。
结合公式(8)与(9),天线转速ra不同时,同一目标海面P1被雷达内、外波束足印覆盖的总次数可以表示为:
nP1(ra)=num(φin)+num(φout)。
(10)
其中,num(·)表示取多值变量取值的个数。
由第1节给出的研究区域内目标海面的总数为N,目标海面集合可以表示为P={P1,P2,…PN}。由公式(10)可知,在不同的天线转速下,被雷达足印覆盖3次或者4次的目标海面集合可以表示为:
P′={Pi,i=1,2,…N|nPi(ra)>2}。
(11)
因此,在不同的天线转速ra下,研究区域内满足被雷达足印覆盖3次或者4次的目标海面数量可以表示为:
M(ra)=card(P′)。
(12)
其中,card(·)表示集合的势。
当M取最大值时,研究区域内被雷达足印覆盖到3次或者4次的目标海面数量最多,此时对应的天线转速为最优天线转速。
(13)

结合天线扫描损耗的要求,利用公式(13)采用非线性约束求最值的方法进行天线转速优化,得到最优天线转速。在该天线转速下,利用公式(8)、(9)可以计算得到每一个目标海面被雷达足印覆盖3次或者4次时的观测方位向。由于采用基于投影关系的矢量流合成方法进行海流反演时需要两个观测方位向下的径向流,为了提高海流的反演精度,需要对观测方位向进行优选。结合公式(2),两个不同观测方位向与海流反演流速、流向之间的关系可以表示为:
(14)
其中,下标n、m表示同一天线转速下的两个不同观测方位向。在观测方位向组合为φm与φn时,海流流速与流向反演结果最优,此时,φm与φn即为最优观测方位向组合。利用最优观测方位向组合下的径向流合成矢量流,得到最终的海流流速和流向。
在本文确定的最优天线转速下进行海流反演,避免了出现雷达足印覆盖盲区导致海流无法反演的问题,同时也减小了径向速度误差对海流反演的影响,提高了海流反演精度。
3 实验分析与验证
天线转速不同时,雷达足印对目标海面的覆盖次数不同,增加对同一目标海面的覆盖次数,对观测方位向进行优选,可以减小矢量流合成时径向速度误差对海流反演的影响,提高海流反演精度。由于海流对气候变化等科学研究具有重要的影响,本文选取了赤道流域、北太平洋流域及墨西哥湾流域[21]三个比较有代表性的海流区域作为研究区域,采用上述三个研究区域2020年12月30日的OSCAR数据,在DopScat系统仿真参数的基础上进行了矢量流反演实验。
本节以墨西哥湾21.67°N—28.33°N,85.36°W—94.66°W范围内的3 600个采样点数据为例,如图6所示,将研究区域按照50 km×50 km的空间分辨率划分为100个小的目标海面,每个目标海面的流速值与流向值分别为该目标海面范围内所有采样点的流速与流向数据的平均值,流速范围为0.02~0.18 m·s-1,流向范围为114.4(°)~339.7(°),如图7所示。其中,每个目标海面按照从1到100的顺序进行编号。

(图中“→”表示海流的流向,颜色深浅表示流速的大小。“→”represents the current direction, the color indicates the current velocity.)

图7 OSCAR海流流速与流向真实值
3.1 雷达足印覆盖2次以上的目标海面数量验证
为了提高海流反演精度,使研究区域内大多数的目标海面被DopScat足印覆盖到3次或者4次,需要在满足雷达足印连续性的条件下,根据天线扫描损耗的要求,不断调整DopScat的天线转速。由第2节确定的天线转速范围及天线转速与天线扫描损耗关系,根据表1给出的当前主流星载微波散射计设定的天线转速,选取在DopScat天线转速为18~40 r·min-1时对墨西哥湾研究区域内的目标海面进行观测,由公式(12)可以得到在不同天线转速下,研究区域内雷达观测到同一目标海面的次数为3次或者4次的目标海面数量,如图8所示。

图8 观测次数达到3次或4次的目标海面数量
研究区域内被雷达足印覆盖3次或者4次的目标海面数量M(ra)占总的目标海面数量N的比例可以表示为:
(15)
结果表明,在天线转速为18 r·min-1[9]时,由公式(15)可得在墨西哥湾研究区域内,雷达足印覆盖同一目标海面次数达到3次或者4次的目标海面数量占总研究区域内目标海面数量的80%,低于天线转速为20 r·min-1时,雷达足印覆盖3次或者4次的目标海面数量占总目标海面数量的比例82%,因此,在天线转速为20 r·min-1时,研究区域内雷达足印对同一目标海面覆盖3次或者4次的目标海面数量最多;另外,可以发现,随着天线转速的加快,对同一目标海面观测到3次或者4次的目标海面数量总体呈现不断减少的趋势。随后,在赤道流域及北太平洋流域也做了相同的实验,结论与墨西哥湾流域所做实验结论相同。
3.2 海流反演精度验证
为了验证DopScat足印对同一目标海面覆盖次数越多,海流反演精度越高,本文在天线转速为18~20 r·min-1时,对墨西哥湾研究区域内的目标海面进行观测为例进行海流反演实验。分别对在天线转速为20 r·min-1时,被DopScat足印覆盖到3次或者4次,在天线转速为18 、19 r·min-1时,被DopScat足印覆盖到2次的目标海面及在天线转速为20 r·min-1时,被DopScat足印覆盖到4次,在天线转速为18、19 r·min-1时,被DopScat足印覆盖到3次的目标海面进行海流反演实验。
实验结果如图9所示,从图9(a)、(c)中可以看出,相比于被雷达足印覆盖3次时的目标海面海流流速、流向反演误差,被覆盖4次时,海流流速、流向反演误差明显减小;图9(b)、(d)表明,被雷达足印覆盖3次或者4次时的海流流速、流向反演误差低于被覆盖2次时的海流流速、流向反演误差。为了验证方法的适用性与有效性,分别选取天线转速为27、28、39和40 r·min-1开展了相同的实验,得到了与上述实验相同的结论。

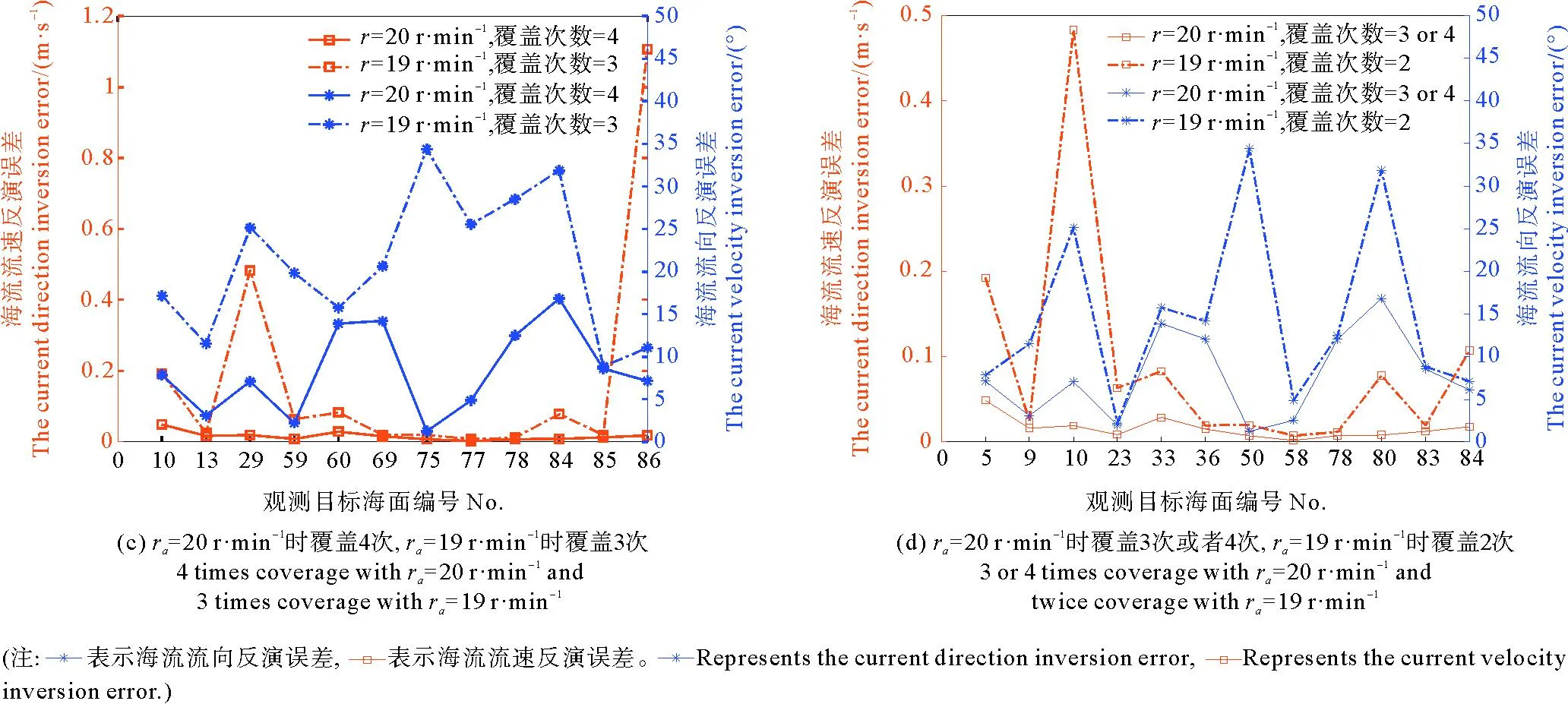
图9 不同目标海面矢量流反演误差图
另外,为了验证上述结论能够适用于全球海流,在上述天线转速下,分别在赤道流域及北太平洋流域也做了相同的海流反演实验,结论与墨西哥湾流域所做实验结论相同。因此,DopScat足印对同一目标海面覆盖次数越多,海流反演精度越高。
结合墨西哥湾流域、赤道流域及北太平洋流域的实验结果与分析,DopScat最优天线转速为20 r·min-1,与公式(13)计算得到最优天线转速20.001 r·min-1非常接近,因此,本文确定最优天线转速为20 r·min-1,此时,天线扫描损耗大约为-1.5 dB。
为了验证天线转速为20 r·min-1时,DopScat海流反演精度提高,考虑到天线转速越大,天线扫描损耗越大,对海流反演精度影响越大,选取天线转速为18~21 r·min-1时分别对墨西哥湾、赤道流及北太平洋三个研究区域进行海流反演实验,实验结果如图10所示。


图10 不同区域不同转速下,流速、流向反演标准差
结果表明,在天线转速为20 r·min-1时,三个研究区域内的海流流速、流向反演标准差明显低于天线转速为18、19和21 r·min-1时的海流流速、流向反演标准差,满足海洋工程应用及全球气候变化研究对海流观测的需求,并且,在不同的研究区域内,相比于原有DopScat在天线转速为18 r·min-1时海流反演得到流速反演标准差0.18 m·s-1[9],利用本文方法得到的海流流速反演标准差均有所减小。
4 结语
DopScat天线转速对海流反演性能具有重要的影响。天线转速过快或者过慢均会影响雷达发射电磁波波束足印对目标海面的覆盖次数,覆盖次数为0或者较少时导致海流无法进行反演或者反演精度较低。对此,本文以提高DopScat海流反演精度为目标,提出了一种面向海流反演的多条件约束天线转速优化方法。该方法确定了DopScat的最优天线转速为20 r·min-1,在该天线转速下,全球超过80%的目标海面被雷达足印覆盖3次或者4次,解决了覆盖盲区的问题,减小了径向速度误差对海流反演的影响,提高了海流反演精度。海流反演实验结果表明,墨西哥湾等不同研究区域的海流流速、流向反演标准差均减小,满足海洋工程应用及全球气候变化研究对海流反演精度的需求。需要指出的是,天线转速的优化与卫星姿态和卫星运行轨道所处的位置也有关。在不同的观测任务下,根据任务所需的系统参数调节天线转速优化模型中的参数,可以实现不同场景下的天线转速优化。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
作文新天地(小学版)(2022年8期)2022-05-30
幼儿园(2021年12期)2021-11-06
红蜻蜓·低年级(2021年2期)2021-07-20
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03
小学科学(2020年6期)2020-06-22
测控技术(2018年2期)2018-12-09
小学生导刊(2017年18期)2017-05-17
上海大中型电机(2017年4期)2017-02-06
中国修辞(2016年0期)2016-03-20