对地观测卫星编队协同容错姿轨耦合控制
2024-03-17 04:29李源青
宇航学报 2024年1期
李源青,杨 浩,倪 媛,姜 斌
(南京航空航天大学自动化学院,南京 211106)
0 引言
随着微小卫星和分布式空间系统等航天技术的发展,卫星编队飞行技术现已成为航天领域的研究热点[1]。卫星编队飞行将单颗复杂大卫星的任务分配给多颗近距离绕飞的小卫星,通过星间链路实现互相通信、协同合作,完成空间数据的采集和处理。因具有低成本、性能高等优点,卫星编队飞行技术广泛应用于分布式星载微波雷达[2]、三维立体成像气象卫星[3]、高分辨率合成孔径雷达[4]等对地观测任务中。
对地观测任务要求编队中的卫星精确地保持相对位置和对地姿态,其中包含了编队构型设计、轨道和姿态控制等多个问题。空间圆编队构型得益于卫星到虚拟主星距离固定、飞行时消耗的能量较小等优势,成为卫星编队构型设计的首选[5],主要被应用于电子侦察、对地三维立体成像以及地面覆盖的合成孔径雷达等场景。为了保持卫星编队的空间圆构型,Yeh 等[6]和Hui 等[7]分别采用滑模控制和终端滑模控制设计了卫星轨道控制器;Lee[8]将非线性扰动观测器和渐进跟踪控制相结合,使得卫星在受外部干扰影响的情况下仍能与虚拟主星保持空间圆编队构型。此外,在姿态控制方面,现有的研究大多假设卫星始终运动在期望的轨道上,设计控制器实现姿态跟踪[9-10]。
另一方面,由于长期工作在强辐射、超低温的恶劣环境中,卫星部件往往因为老化或其他不可抗力的因素出现各种故障。而任何部件故障都可能导致系统性能的下降,甚至引发卫星编队的不稳定。作为容错控制的基础和前提,卫星编队的故障诊断与可重构性研究现已取得一定的成果,文献[11-12]针对卫星编队的部件故障,分别设计了基于模糊规则的分层故障诊断框架和基于广义观测器的故障检测与估计方法,提出了可重构性条件。在故障可重构的前提下,有必要设计容错控制策略,使得整个编队的性能达到可接受的水平。目前,已有许多针对卫星部件故障的容错控制研究[13-16]。例如,Dong 等[15]考虑卫星的执行器故障,设计了非线性自适应容错反馈控制器,实现了卫星对目标位置和姿态的跟踪。Nasrolahi 等[16]采用非线性观测器和静态估计器对传感器故障进行诊断,并设计容错控制器实现了卫星姿态的跟踪同步。当存在卫星完全失效故障时,Yang 等[17]为保持原有的编队构型,提供了用补充卫星替换故障卫星的方案。
然而,现有的对地观测卫星编队控制研究存在两大局限性:1)大部分研究将轨道和姿态的控制分开考虑,忽略了卫星编队控制固有的姿态和轨道之间的耦合效应[18-20],这限制了模型与控制的精确性。2)对于对地观测卫星编队中出现完全失效卫星的情形,现有的解决方案通常为储备备用卫星或发射新卫星来替换故障卫星,成本高昂且往往接替时间较长。
通过以上的分析和讨论,本文针对卫星编队对地观测过程中的完全失效故障问题,提出了基于构型调整的协同容错控制框架。首先,面向对地观测任务要求,提出了卫星编队的构型设计条件,以及故障发生后移除故障卫星的分布式构型调整方案;在此基础上,考虑外部干扰以及轨道和姿态控制的耦合特性,设计了分布式鲁棒控制器,使得故障发生前后卫星编队都可以在有限时间内实现对期望构型的跟踪;最后,通过数值仿真和实验对所提方法的有效性进行了验证。
1 姿轨耦合控制模型
1.1 符号定义
Im表示m维单位矩阵,0m×n表示m行n列的全0矩阵。对于集合S,定义其元素个数为|S|。定义列向量x≜[x1…xn]T∈Rn×1和常数α∈R,sgn(·)为符号函数,diag(·)为对角矩阵,本文定义如下表达:
定义a×为向量a=[a1a2a3]T∈R3×1对应的如下形式反对称矩阵:
1.2 卫星网络
本文考虑由1 颗虚拟主星和N(N≥3)颗卫星组成的对地观测卫星编队。定义卫星集合Q≜{1,2,…,N},并将其划分为P≥1 簇进行管理,以减少网络管理开销,提高网络容量[21],簇的集合记为S≜{1,2,…,P},簇p∈S中的卫星集合记为Qp。
为了在卫星之间传递姿轨信息并将观测信息回传至地面站,定义状态信息图为有向图G1≜{V,E1},其中,V≜S∪{0,P+1}表示节点集合,簇p∈S对应节点p∈V,虚拟主星对应节点0,地面站对应节点P+1。E1⊆V×V为由边组成的集合,(w,v) ∈E1表示存在由节点w到节点v的边,即节点v可以从节点w获取状态信息[22]。定义G1的邻接矩阵为B≜[bvw]∈R(P+2)×(P+2),当(w,v) ∈E1时,bvw=1,否则,bvw=0。
为实现编队控制,并减少通信干扰,提出以下连通性假设。
假设1.对于任意p∈V,若v=p+1 且v∈V,则bvp=1,否则bvp=0。
为简单起见,将p+1和p-1记为p+和。
此外,为了感知故障信息并在编队中传递,定义故障传递图为无向图G2≜{V,E2}。其中,E2≜{(w,v)|(w,v) ∈E1或(v,w) ∈E1或w=v,w,v∈V},定义G2的邻接矩阵为=∈R(P+2)×(P+2),当(w,v) ∈E2时=1,否则=0。
1.3 坐标系
为了描述卫星和地面观测目标之间的位置和姿态关系,介绍如图1所示3个坐标系。
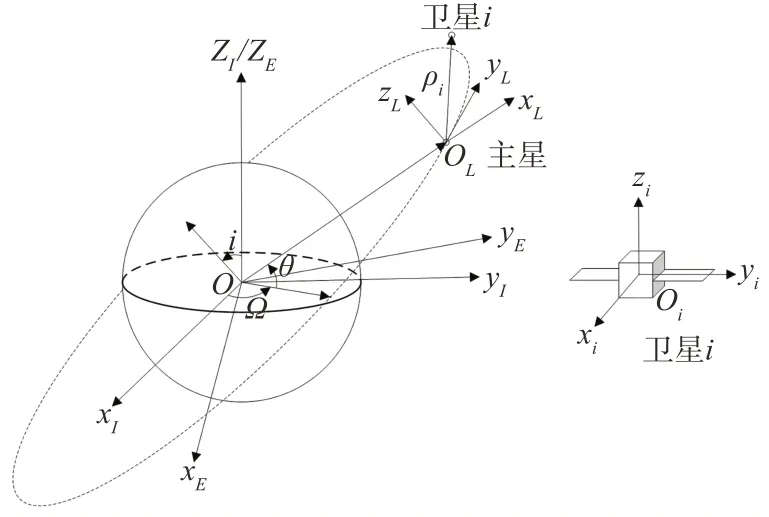
图1 坐标系示意图Fig.1 Diagram of coordinates
1)CI=[OxIOyIOzI]T表示惯性坐标系,原点位于地心,OxI轴指向春分点,OzI轴指向北极并平行于地球自转轴,OyI轴在赤道平面内与另外2轴满足右手定则。
2)CL=[OLxLOLyLOLzL]T为主星轨道坐标系,原点位于主星质心。OLxL轴沿地心矢量向外,OLyL轴沿切向速度方向,3轴满足右手定则。
3)Ci=[OixiOiyiOizi]T表示卫星i(i∈Q)的本体坐标系,原点位于卫星质心,对地观测天线沿Oizi轴安装。
1.4 姿轨耦合模型
在本文中,假设地球是一个半径为Re的球体,虚拟主星运行于椭圆轨道。卫星i∈Q与虚拟主星的相对轨道动力学为[23]:
式中:ρi≜[xiyizi]T∈R3×1为卫星i在主星轨道坐标系CL中的位置向量;mi为卫星i的质量;FiL∈R3×1为控制力;Fdi∈R3×1为太阳光压及三体引力等引起的轨道摄动力;矩阵A1和A2分别为:
式中:μ为地球引力常数;θ为主星真近点角;RT=‖RT‖是惯性坐标系CI中虚拟主星位置向量的范数,满足
由于卫星推力器沿本体安装,FiL可以写为:
式中:Fi≜[FixFiyFiz]T∈R3×1表示在卫星i本体坐标系Ci中的轨道控制力;ALsi为卫星i本体坐标系Ci到主星轨道坐标系CL的旋转矩阵。
卫星i的姿态运动学和动力学分别表示为[24]:
对于i∈Q,由于Qiv和Ji有界,可得‖Di‖≤D*,其中D*为正常数。由式(13)可知,矩阵Bi包含卫星i本体坐标系Ci到主星轨道坐标系CL的旋转矩阵ALsi,ALsi与卫星相对虚拟主星的姿态有关[25],表明轨道和姿态的控制问题存在固有的耦合特性。
1.5 问题描述
本文考虑编队中卫星的波束角为ϖ,观测目标是以主星星下点为中心,弧长为υ的球冠区域,其地心角为。对地观测任务(如合成孔径雷达等)要求编队中各卫星的波束均覆盖观测目标,且相邻卫星间维持相同星间距d。
如图2 所示,平面Π 为主星星下点处的地球切平面,观测目标在平面Π 内的投影是半径为rc=Resinχ的圆Λ,卫星i波束覆盖区域在Π 平面内的投影为椭圆Γi。若对任意卫星i∈Q,椭圆Γi均包含圆Λ,那么卫星编队实现了对目标的观测。
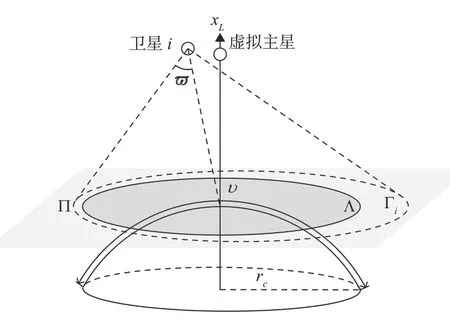
图2 对地观测示意图Fig.2 Schematic diagram of earth observation
实现以上对地观测任务要求,依赖于对期望构型的设计以及姿态和轨道层面精确的控制。定义每颗卫星的期望状态为,本文的目标是在故障发生前后,设计满足观测任务的期望构型,并设计控制输入Ui,使得卫星编队可以在有限时间T内实现对期望构型的跟踪,即:
2 构型设计与重构
2.1 无故障构型
将卫星按照簇从小到大依次编号,卫星i对应的初始编号为ki。为维持相邻卫星间相同星间距d,本文选择空间圆构型,卫星i∈Q在主星轨道坐标系CL中的期望位置为:
为实现对目标的观测,令各卫星波束中心指向主星星下点,即要求卫星i本体坐标系Ci的Oizi轴与卫星i到虚拟主星星下点的向量gi重合。向量gi在卫星i本体坐标系Ci中为:
式中:li为主星轨道坐标系CL中卫星i到主星星下点的向量;r1=[-(RT-Re) 00]T为坐标系CL中虚拟主星到星下点的向量为坐标系CL卫星i的期望位置向量。根据姿态要求有:
式中:C·=cos(·),S·=sin(·);φi,θi和ψi分别为卫星i的滚动角,俯仰角和偏航角。
由式(18)可解出卫星i滚动角φi和俯仰角θi的约束:
由式(20)可知偏航角ψi不唯一,本文假设ψi=0。则卫星i的期望姿态为:
假设卫星i与虚拟主星的轨道高度之差远小于主星的轨道高度,将卫星i到平面Π 的距离近似为虚拟主星的轨道高度h=RTmin-Re,其中,RTmin为主星轨道高度的最小值。定理1给出了空间圆构型半径R的设计条件。
卫星编队可以实现对目标区域的协同观测。
证.卫星i的波束投影如图3所示,其中,卫星i记为点A,主星星下点记为点D,BC为椭圆长轴。F为卫星i在平面Π 上的投影,令ξ=∠DAF=arctan在波束投影椭圆上任取一点E,由正弦定理可得:
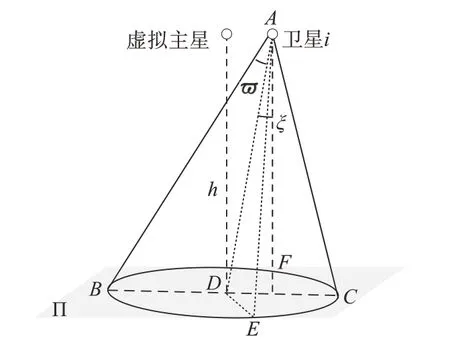
图3 波束投影图Fig.3 Beam projection diagram
易知当sin ∠AED取最大值时最小。当E与C重合时,∠AED取最大值,由(22)得max(ξ) ≤ϖ,为锐角,所以此时sin ∠AED取最大值,可得的最小值为:
注1.由式(15)可得,空间圆构型半径R与星间距d有关。因此,基于定理1的构型设计条件,选取合适的星间距d能够保证所设计的期望构型满足观测任务要求。
2.2 构型调整
考虑有M(M≤N-2)颗卫星在ts时刻完全失效,定义节点p∈V中的故障卫星集合为,其中。定义完全失效簇集合为Sf≜本文仅考虑相邻簇的卫星不全部失效的情形,即对于任意p∈S{P},若p∈Sf,则p+∉Sf。
为了移除故障卫星且保证剩余卫星间状态信息与故障信息仍能传递,需要对卫星网络进行重构,具体地,a)对任意簇p∈S,更新其卫星集合为调整状态信息图G1和故障传递图G2,将其邻接矩阵分别重构为B′和-,满足:
上述算法的主要思想为:对任意p∈S,a)将故障卫星移出簇p;b)若簇p中所有卫星都失效,断开图G1、G2中与节点p相连的边,并在图G1中建立节点p-到p+的有向边,在图G2中建立节点p-与p+间的无向边,恢复卫星网络信息传递。
此外,为了保持紧凑构型以节约通信资源,需要调整移除故障卫星后的编队构型。由式(15)可知,卫星的期望位置向量与卫星编号有关,下文将首先更新剩余卫星的编号,再根据新编号计算剩余卫星的期望位置和姿态。
定义节点1 到节点m所有的故障卫星集合为对于任意p∈SSf,集合Fp的构造方法与簇p内剩余卫星编号更新规则如图5所示。
该算法首先将簇p中任意剩余卫星i编号ki与集合Fp中卫星编号比较,令ki减去Fp中编号小于ki的卫星数量,得到其新编号k′i。其次,更新故障卫星集合并向下一簇传递。
由图5 所示流程图可得,地面站收到故障卫星集合FP,可计算出编队中完全失效的卫星数量为M=|FP|,剩余卫星集合为Q′=QFP。为维持相邻卫星间相同的星间距d,将空间圆构型的半径重构为:
卫星编队在新的空间圆构型下能实现对目标的观测。
证.为维持观测任务,令编队中剩余卫星的观测天线仍指向虚拟主星星下点。由定理1中式(24)易得,编队重构后,在波束投影椭圆内以主星星下点为圆心的内切圆半径为:
若新的空间圆构型满足定理2,则计算转移相位角以调整剩余卫星的期望轨道位置。定义卫星i∈Q′需要转移的相位角为ζi≜ς+ϑi-γi,其中,ς为集合Q′中编号1 卫星的目标转移相位角,ϑi=为卫星i与编号1 卫星的相位差为卫星i的初始构型相位角。为了减小编队卫星转移的相位角,定义如下性能指标:
为了最小化J,将式(30)展开并对ς求导,令=0 可得极点,在极点ς0处,J取得最小值,ς0表达式为:
地面站由式(27)计算重构轨道的空间圆半径r,由式(31)计算使得J最小的相位角ς0,并将它们发送给虚拟主星,由虚拟主星沿重构后的图G1传递至各剩余卫星。
卫星i∈Q′在主星轨道坐标系CL中的期望位置向量调整为:
式(32)仅给出了期望位置向量,而队形发生变化后,为了观测地面目标,期望姿态也要相应调整,卫星i∈Q′的姿轨重构算法流程图如图6所示。
注2.上述3 个算法流程图,仅通过卫星网络运用相邻节点传递的信息实现对自身信息的更新,均为分布式算法。
3 容错控制框架设计
3.1 容错控制框架
为了使得卫星编队在有卫星完全失效后可以跟踪上文设计的期望构型,本文设计了如图7 所示的协同容错控制框架,考虑式(11)描述的卫星编队,编队控制器的设计步骤如下:
1)故障发生前,对任意卫星i∈Q,根据式(15)和(21)设计初始编队构型,并设计控制器使得卫星编队跟踪期望构型;
2)为移除故障卫星,且保证剩余卫星的连通性,采用图4所示流程图对卫星网络进行重构,为维持紧凑构型以节约通信资源,采用图5 流程图对剩余卫星编号更新,采用图6 流程图对期望姿轨进行重构;
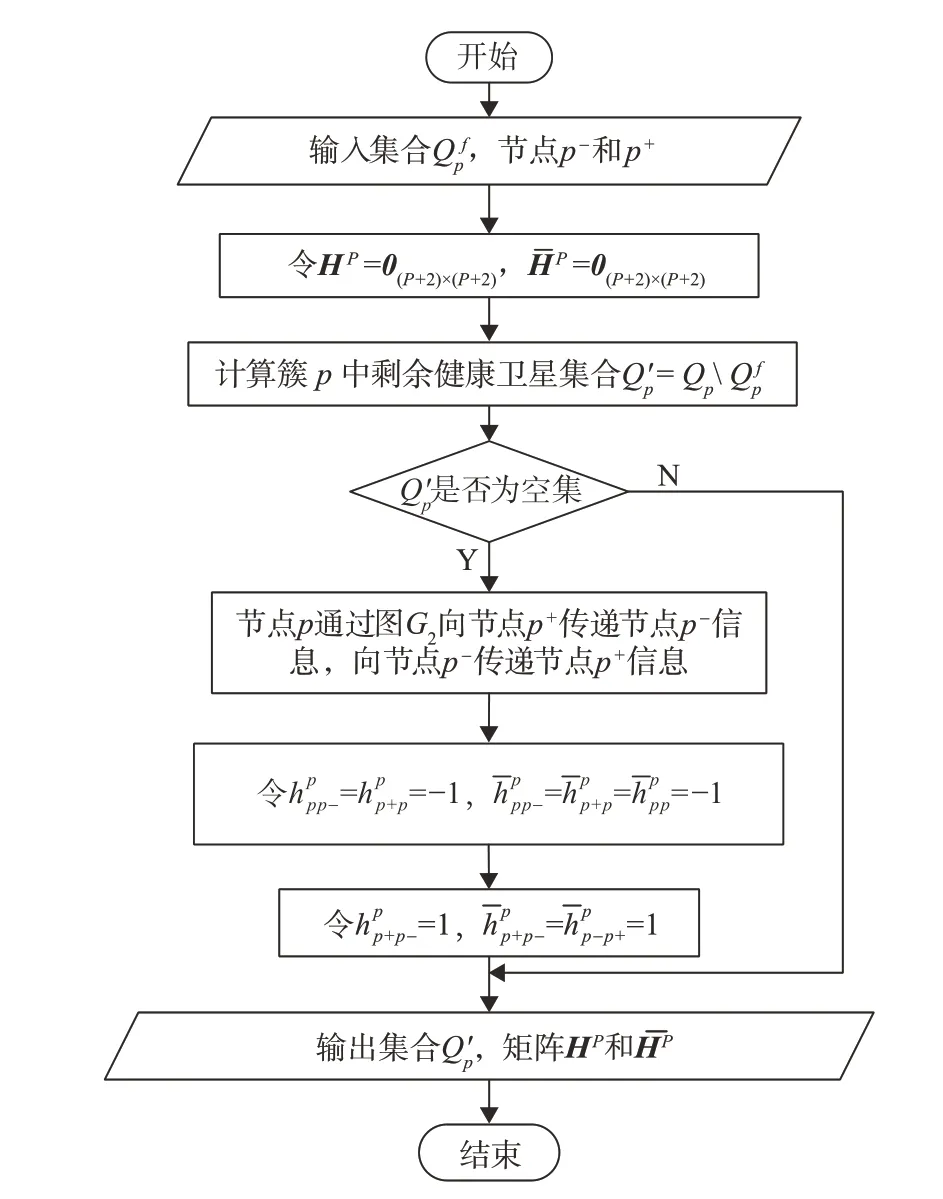
图4 卫星网络重构算法流程图Fig.4 Flowchart of satellite network reconfiguration algorithm
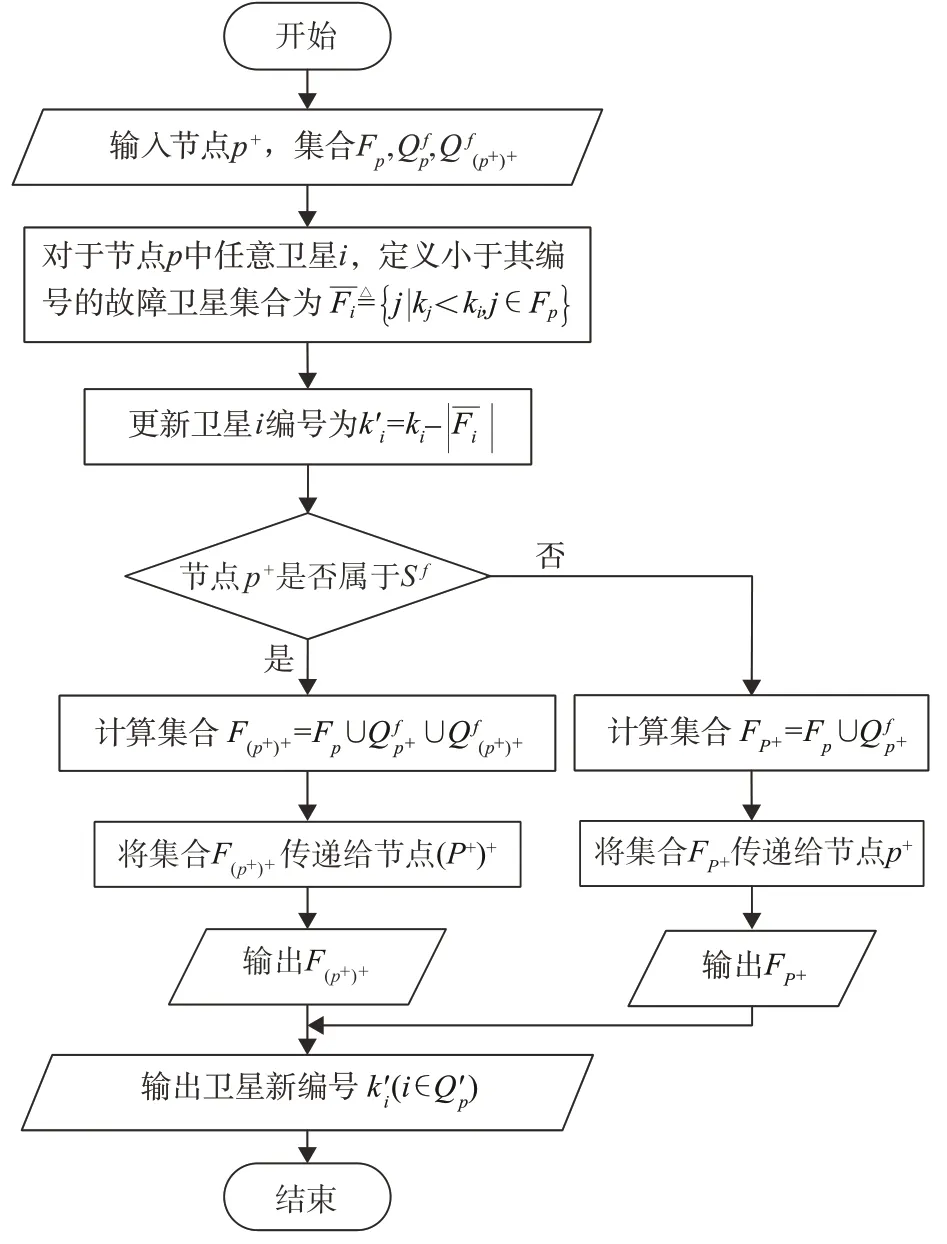
图5 编号更新算法流程图Fig.5 Flowchart of satellite number updating algorithm
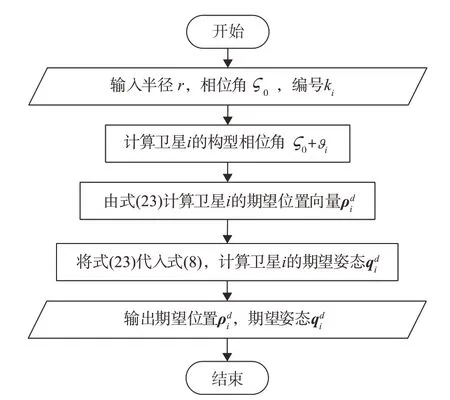
图6 姿轨重构算法流程图Fig.6 Flowchart of attitude and orbit reconfiguration algorithm
3)根据重构后的通信拓扑和期望构型,运用邻居信息对任意卫星i∈Q′设计控制器,使得剩余卫星跟踪新的期望构型,实现对地面目标的观测任务。
注3.本节仅提出了卫星编队协同容错控制的框架,具体的控制器设计将在3.2节中给出。
3.2 滑模控制律设计
本节在图7 所示协同容错控制框架的基础上,提出了基于非奇异终端滑模控制[26]的分布式控制律。定义卫星i∈Q的协同误差为:
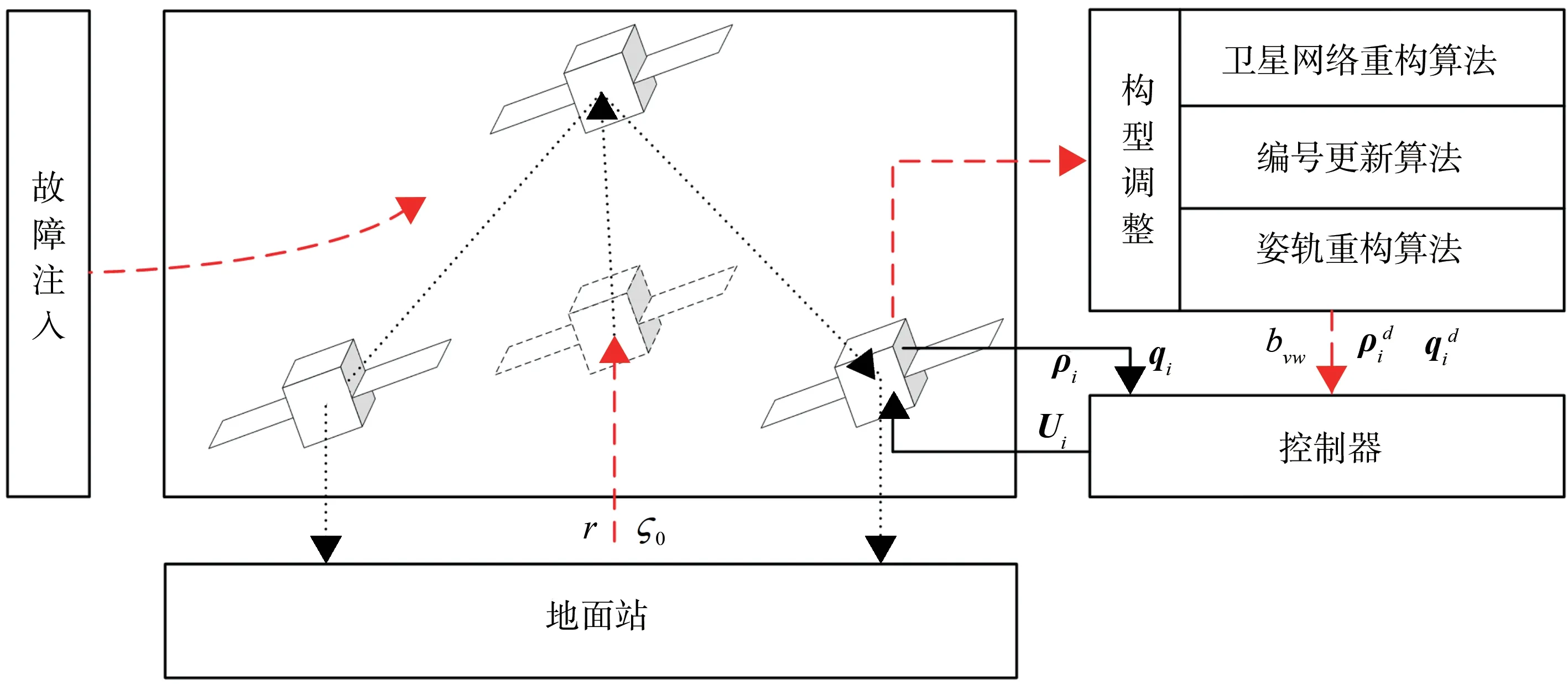
图7 编队容错控制框架Fig.7 Fault-tolerant control architecture
设计卫星i的滑模面为:
式中:si=[si1…si6]T∈R6×1为滑模变量;βi=diag(βi1,…,βi6)∈R6×6为正定对角矩阵;pi和bi为正奇数,且满足滑模变量si的时间导数为:
引理1[27].设a1,a2,…,an>0,0 <c<1,则a1,a2,…,an,c满足以下不等式:
假设2[28].对于任意卫星i∈Q,轨道摄动力Fdi和姿态干扰力矩δi有界,即对于扰动矩阵di,存在常数d*∈R+满足:
定理3.考虑由式(11)描述的卫星i∈Q,基于假设1和假设2,选取非奇异终端滑模面(34),在如下控制器的作用下
卫星的状态可以在有限时间内收敛到包含滑模面si=0的邻域Ωs内,其中:
式(37)中:ki=diag(ki1,…,ki6) ∈R6×6为正定对角阵;αi∈R为控制器参数,且满足0 <αi<1。
证.选择李雅普诺夫函数为:
当滑模变量不在域Ωs中时,ηim≥0,可得≤0,因此,滑模变量可以在有限时间内收敛到邻域(38)内,证毕。
注4.由收敛域Ωs的表达式(38)可知,其范围与扰动上界d*有关,增大kim可以减小收敛域Ωs范围。
4 仿真校验
4.1 数值仿真
本节将通过数值仿真来验证本文所提协同容错姿轨耦合控制框架的性能。假设由1颗虚拟主星和3 颗对地观测卫星组成的编队在太空中运行,卫星网络的邻接矩阵为:
其状态信息图如图8所示。
仿真参数如表1 所示,其中ρi0表示卫星i在主星轨道坐标系CL中的初始位置向量,qi0和ωi0分别代表卫星i的初始四元数和初始角速度。虚拟主星轨道的半长轴a=6 902.9 km,偏心率e=0.007 2,轨道倾角i=1.701 1°,升交点赤经Ω=2.530 7°,初始真近点角θ0=0.34°,近地点角距ω=4.712 4°。观测目标是以主星星下点为中心,弧长为υ=10 km的球冠区域,其投影圆Λ半径为rc≈10 km,卫星的波束角为ϖ=0.02 rad。由定理1 设计相邻卫星星间距为对于式(15),空间圆半径R=20 km,令
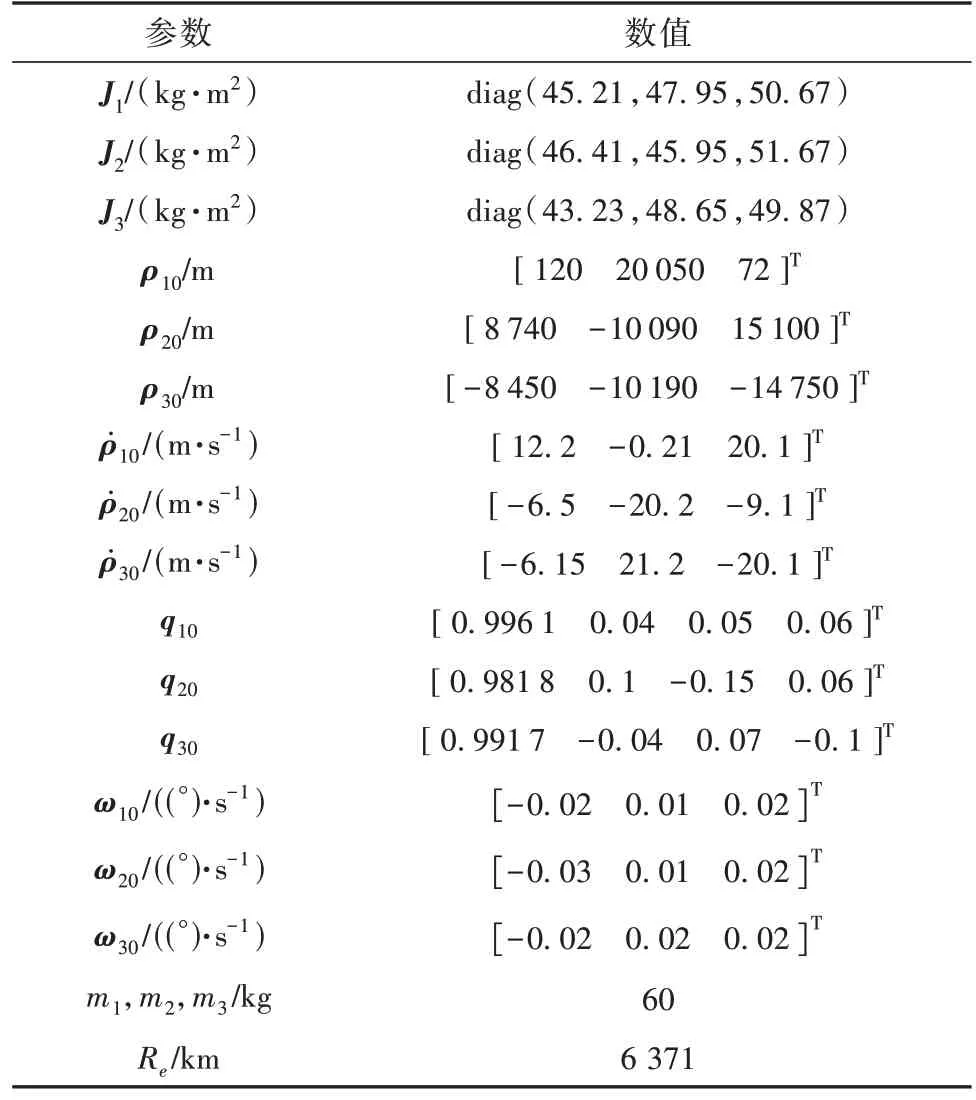
表1 仿真参数Table 1 Simulation parameters
对集合Q中的卫星设计分布式控制器(37),配置控制器参数如下:β1=diag(6,7,6.5,5.5,6,5.5),β2=diag(8,7,8.5,6.5,6,6.5),β3=diag(39.6,40,40.5,6.5,6,8.5),p1=51,b1=31,p2=63,b2=39,p3=51,b3=35,k1=diag(28 260,25 680,28 560,300,350,200),k2=diag(18 260,18 680,18 560,300,350,200),k3=diag(8 360,8 680,8 660,300,350,200),α1=0.85,α2=0.85,α3=0.86。
轨道摄动力设置为:
式中:A0=1.5 × 10-5,ω0为轨道角速度。考虑到卫星执行机构的限制,设定每颗卫星的最大轨道控制力为10 N,最大姿态控制力矩为4.5 Nm。
在仿真图中,Exi,Eyi,Ezi,Eqi1,Eqi2和Eqi3分别代表卫星位置和姿态相对于期望值之间的误差。如图9 所示,编队中的卫星1 在控制器的作用下,轨道误差和姿态误差分别在80 秒和5秒内收敛。如图10 所示,卫星2 的轨道误差和姿态误差分别在100 秒和5 秒内收敛。如图11 所示,卫星3的轨道和姿态收敛时间分别为250秒和10秒。

图9 故障前卫星1与期望状态之间的误差Fig.9 Error between satellite 1 and expected states before failure
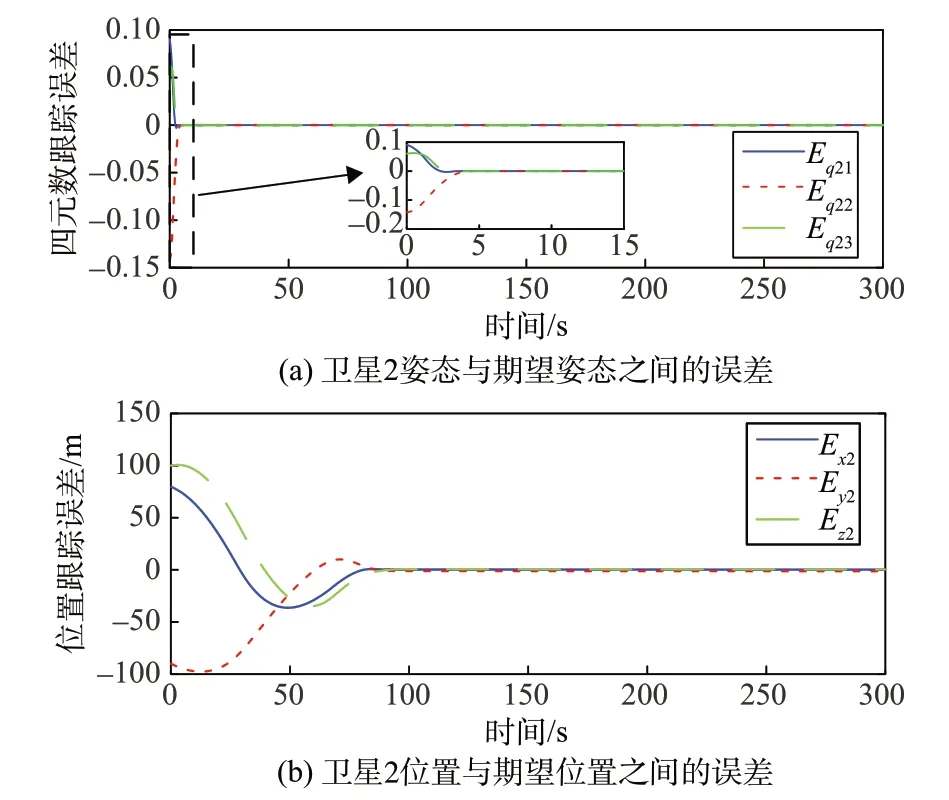
图10 故障前卫星2与期望状态之间的误差Fig.10 Error between satellite 2 and expected states before failure
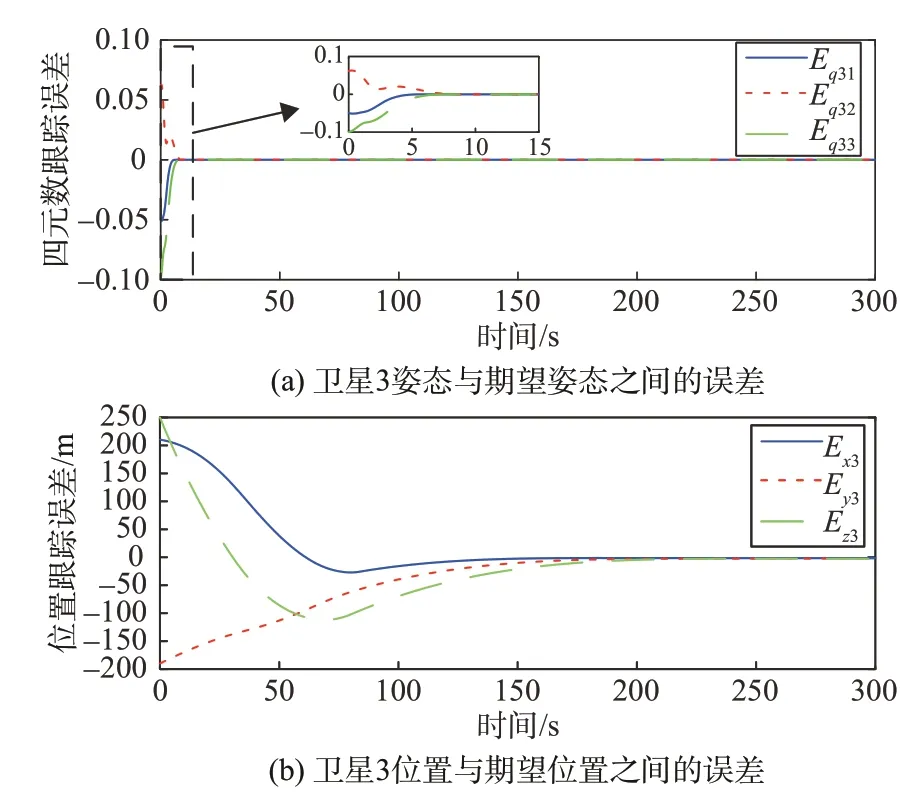
图11 故障前卫星3与期望状态之间的误差Fig.11 Error between satellite 3 and expected states before failure
假设在ts=300 s时,对地观测卫星编队中的卫星1发生了故障,剩余卫星间的卫星网络按图4所示算法重构,状态信息图重构为图12 所示,卫星网络的邻接矩阵为:
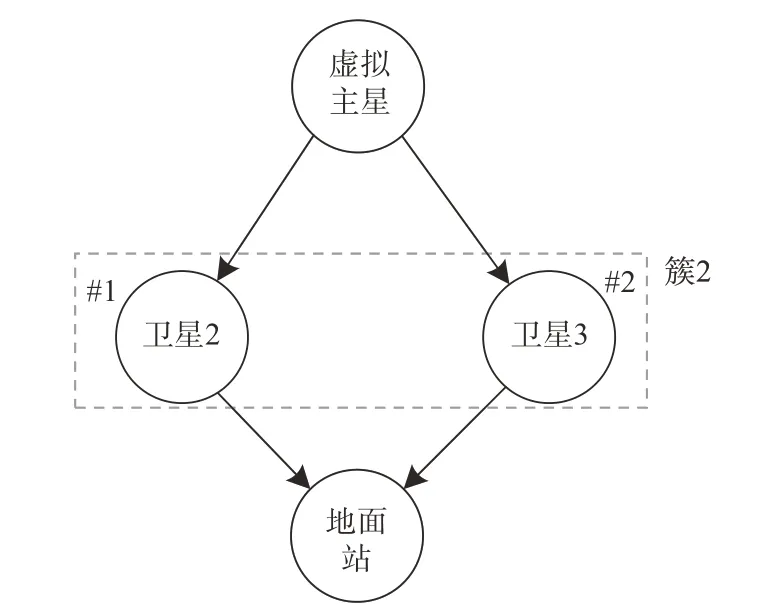
图12 重构后的状态信息图Fig.12 State information graph after reconfiguration
调整编队控制器的参数为β2=diag(15,16,15.5,6.5,6,6.5),β3=diag(35.4,36,40.5,6.5,6,8.5),α2=0.65,α3=0.68。如图13 和图14 所示,将卫星1 移出编队,卫星2 和卫星3 可以在600 秒内完成对新的期望位置的跟踪,因姿态调整幅度较小,姿态误差收敛时间只有3 秒,卫星编队在主星轨道坐标系CL内的整体运行轨迹如图15所示。
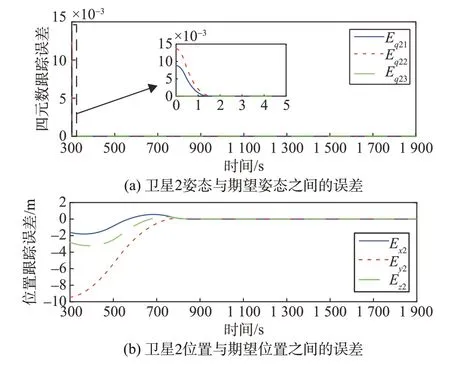
图13 故障后卫星2与期望状态间的误差Fig.13 Error between satellite 2 and expected states after failure
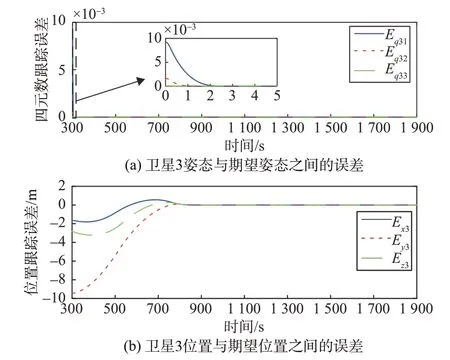
图14 故障后卫星3与期望状态之间的误差Fig.14 Error between satellite 3 and expected states after failure
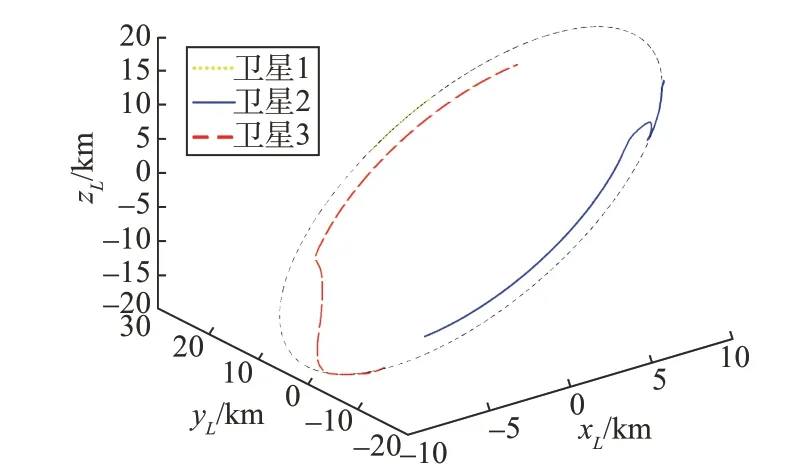
图15 卫星编队的空间圆轨迹Fig.15 Whole trajectory of the satellite formation
4.2 实验验证
本节通过3 自由度气浮台进行实验,验证所提协同容错控制框架。气浮台主要构造如图16所示,陀螺仪用于测量台体的角速度和角加速度,星载计算机负责地面中心和气浮台之间的通信、将实验过程中的数据传输至地面中心,且能将地面控制台的指令进行处理编码,传输给气浮台进行控制。4 个反作用飞轮中,飞轮1、2、3分别沿X、Y、Z轴正装,飞轮4为斜装飞轮。
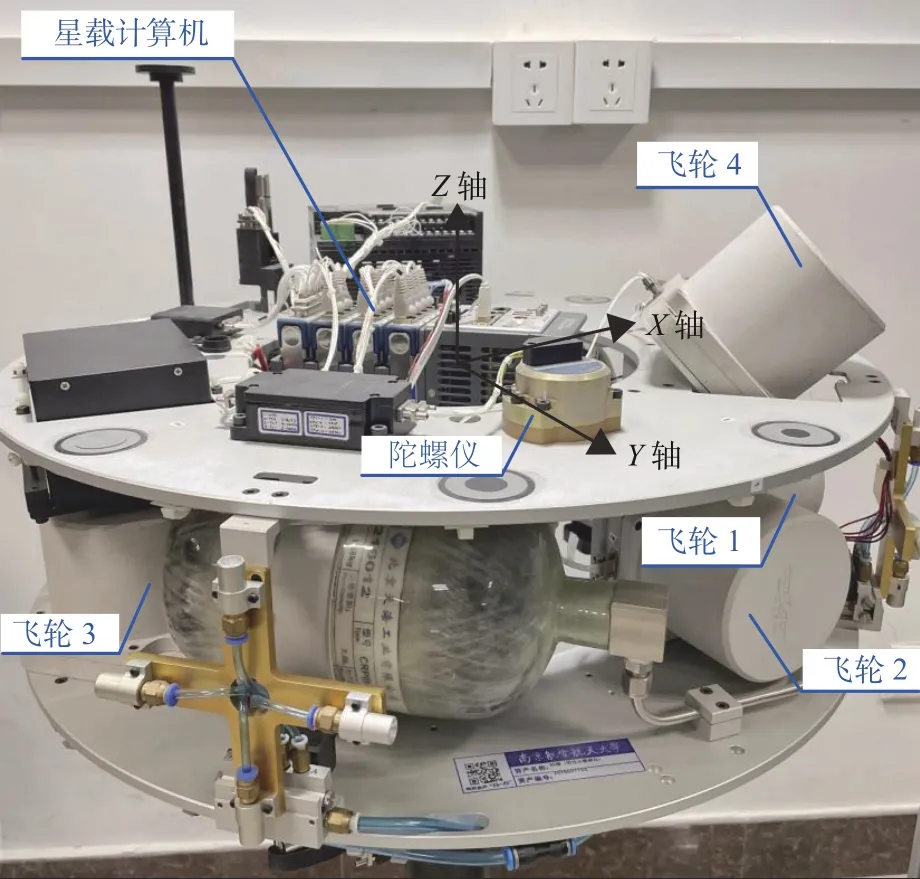
图16 气浮台主要构造Fig.16 The main structure of air-bearing platform
气浮台的简要控制回路如图17所示,在地面中心使用LabVIEW 软件编写卫星目标姿态以及控制器,并通过无线通信将目标姿态和控制指令输入星载计算机,星载计算机将控制指令编码后驱动飞轮对台体进行姿态控制,陀螺仪测量气浮台的姿态信息并将其传送到星载计算机,星载计算机通过对比目标姿态和当前姿态计算所需的控制力矩,驱动飞轮实现气浮台的姿态控制。
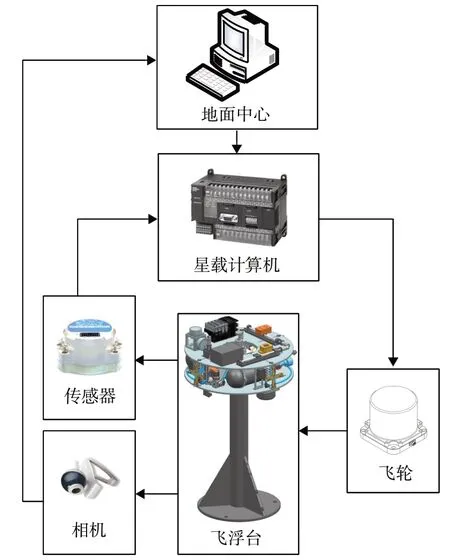
图17 气浮台控制回路Fig.17 Control loop of air-bearing platform
实验方案如下:考虑如图8 所示的卫星编队系统,在地面中心使用LabVIEW 软件搭建卫星1 和卫星3 的姿轨动力学以及卫星2 的轨道动力学,采用气浮台模拟卫星2 的姿态运动,并假设在第7 秒卫星1发生故障。
气浮台实验中卫星2 的参数如下所示,其转动惯量为:
最大姿态角速度为0.8°/s,最大控制力矩为0.015 Nm。气浮台仿真的姿态由欧拉角表征,设定初始仿真参数为:俯仰角θ0=12.312°,滚动角φ0=5.276°,偏航角ψ0=7.318°。本文采用3 个正装飞轮实现气浮台的姿态控制,将式(37)所示的卫星2 控制器中的参数调整为β2=diag(8,7,8.5,18,18,14.3),k2=diag(18 260,18 680,18 560,3,3.5,3),p2=33,b2=31,α2=0.84,其余参数与4.1节中的仿真参数相同。
实验开始时,由3 颗卫星组成的编队组成半径为R=20 km 的空间圆,并对虚拟主星星下点区域进行观测,则编队中卫星对期望构型(15)、(21)进行跟踪。故障发生后将卫星1 移出编队,重构空间圆半径为,卫星2 和卫星3 需要跟踪的期望构型发生改变。
实验中气浮台模拟的卫星2对期望姿态的跟踪误差如图18 所示,由于在第7 秒卫星2 的期望姿态发生了改变,其姿态跟踪误差发生了小幅跳变。由图可知,俯仰角、滚动角和偏航角的误差均可以在20秒内收敛,即卫星2可以跟踪期望姿态,上述实验验证了本文所提容错控制框架的有效性。
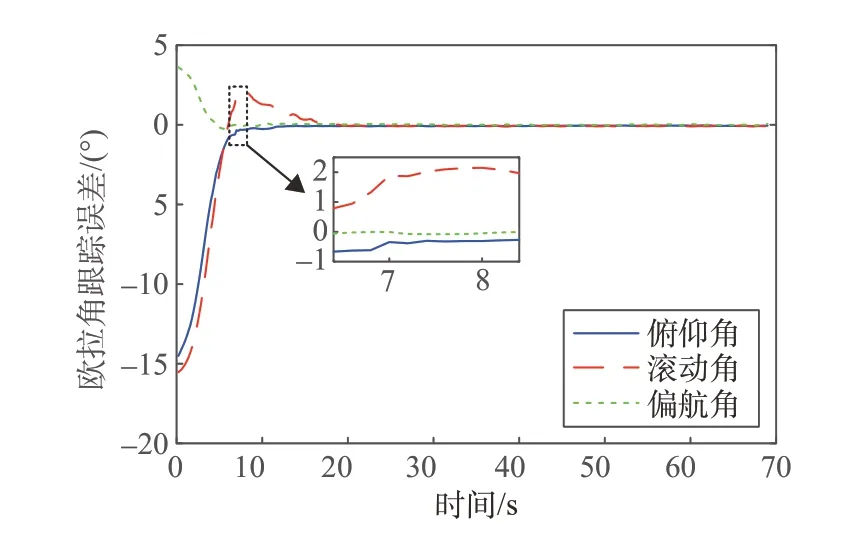
图18 卫星2气浮台仿真姿态误差Fig.18 Attitude error of satellite 2 in air-bearing platform experiment
5 结论
对于发生完全失效故障的对地观测卫星编队,本文考虑轨道和姿态控制的耦合效应,建立了协同容错控制框架,实现了故障发生前后卫星编队对给定目标的观测,并通过仿真和实验对该框架进行了验证。后续工作可以在本文的基础上,围绕模型不确定性的内容深入研究,考虑卫星在轨运行期间的质量和转动惯量的变化对稳定性的影响。
猜你喜欢
军事文摘(2023年5期)2023-03-27
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
空间碎片研究(2018年2期)2018-12-06
科学导报(2018年22期)2018-05-14
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
航空学报(2016年9期)2016-12-06
电子与信息学报(2015年11期)2015-10-14
海军航空大学学报(2015年4期)2015-02-27
航天返回与遥感(2014年4期)2014-07-31