
基于Sentinel-1和Sentinel-2的不同物候期农作物识别研究
2024-04-15 07:36常竹李虎陈冬花刘玉锋邹陈陈健韩伟杰
安徽师范大学学报(自然科学版) 2024年1期
常竹 李虎 陈冬花 刘玉锋 邹陈 陈健 韩伟杰
摘要:为减少农作物提取过程中受光学数据成像质量的影响,基于Google Earth Engine平台,采用Sentinel-1和Sentinel-2数据,分别对小麦越冬期、返青期、孕穗期、成熟期四个物候期进行小麦和油菜的识别。使用随机森林方法对构建的光谱特征、植被指数特征、红边指数特征、纹理特征和极化特征共34个特征进行优选,构建特征集;并对比最小距离、决策树、支持向量机、随机森林四种分类器在四个物候期的识别结果,确定最优的分类器;同时还验证了极化特征在四个物候期对识别结果的影响。研究结果表明,在四个物候期中最优的分类器均为随机森林,其中识别精度从高到低的物候期分别为小麦的孕穗期、成熟期、返青期、越冬期,总体精度(OA)分别为92.91%、91.93%、90.24%、87.69%,Kappa系数分别为91.00%、89.92%、87.61%、84.53%。在四个物候期中加入极化特征均能提高识别的精度,其中在小麦的返青期和成熟期更为明显。
关键词:物候期;农作物识别;Sentinel-1;Sentinel-2;Google Earth Engine;随机森林
中图分类号:TP79 文献标志码:A 文章编号: 1001-2443(2024)01-0033-11
农作物类型识别是农作物面积提取、长势监测、产量估计、灾害评估的关键。实时准确地获取作物分布信息对农业生产有积极意义[1-2]。目前,基于卫星数据的不同农作物遥感识别多为利用其在不同物候期特定的光谱变化来实现[3-10]。利用单时相遥感影像识别不同农作物时多选用特定物候期(如油菜花期),在此物候期内因作物光谱差异大、易于区分而有望获得较高精度[11-12]。而在实际监测中,确保每个物候期都能获取同一传感器较高影像质量的卫星影像较为困难。即使是在油菜花期这一特定物候期,获取高质量的影像也具有不确定性。对不同物候期农作物遥感识别开展研究,可以在无法获取长时间序列高质量影像的情况下,选择识别效果相对较好的物候期影像进行作物识别,同时针对农业生产中的不同需求可以及时选取相近时间段影像进行作物识别。
现有研究表明,在作物识别方面,使用光学和雷达数据结合得到的识别效果优于仅用单一的光学或雷达数据[13-14]。但此类研究并未对多个物候期进行分别探究,在不同物候期内联合光学和雷达数据的识别效果尚不明确。因此,开展不同物候期联合光学和雷达数据的农作物识别具有一定现实意义,可为后续相关研究提供借鉴参考。
本文以开源的Google Earth Engine(GEE)作为数据处理的平台,基于Sentinel-1和Sentinel-2数据对小麦的越冬期、返青期、孕穗期、成熟期四个重要物候期的小麦、油菜识别的最优特征组合和方法进行研究,优选出不同物候期内的最优特征组合和最优方法。同时对比加入极化特征在各物候期对识别结果的影响,验证极化特征在各物候期对识别结果的重要性。通过对比研究,定量评价不同特征组合和算法在不同物候期内的识别精度,以确定适合不同物候期小麦、油菜识别的最优特征组合和最优方法。
1 研究区与数据处理
1.1 研究区概况
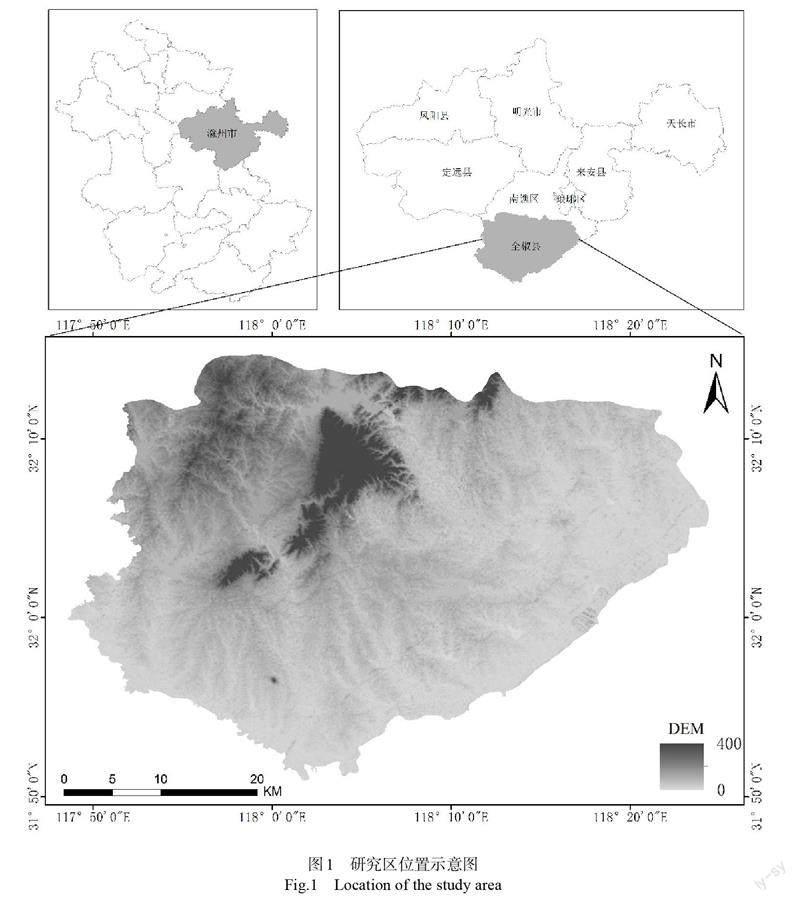
本研究以安徽省全椒县(31°51′~32°15′N,117°49′~118°25′E)为研究区。全椒县位于中国南北分界的江淮分水岭区域,地貌类型有丘陵、波状平原和平原三种,地势呈东南—西北走向,最高点海拔393 m。全椒县是安徽省农业种植大县,春季作物以小麦和油菜为主、秋季作物以水稻和大豆为主,农业种植结构复杂,既有平原区域的集体种植、又有山区的零散分布,受地形和氣候的影响,作物的遥感成像易形成“同物异谱”现象。图1为研究区位置示意图。
1.2 数据源及处理
基于云技术的GEE将各类数据存储在云端,总量超过5Pt,并允许用户通过 Web 客户端调用、可视化检索、处理、在线分析和下载各种数据。与基于本地计算机的传统数据处理方法相比,GEE的出现极大地提高了大数据处理研究的效率,降低了大规模分析的门槛[15-18]。GEE提供两种Sentinel-2的产品数据,分别为L1C和L2A产品,L1C为经过正射校正后产品数据,L2A为经过正射校正和大气校正后的产品数据。本文Sentinel-1选择干涉宽幅(IW)模式成像,包含VV和VH两种极化方式的10m分辨率GRD产品,Sentinel-2选用经过大气校正后的L2A产品。覆盖整个研究区Sentinel-1影像需要一景,Sentinel-2影像需要两景,本文收集了小麦的越冬期、返青期、孕穗期、成熟期四个重要物候期的Sentinel-1和Sentinle-2影像。
针对Sentinel-1的GRD产品数据,利用GEE在线进行地形校正和滤波降噪处理,得到包含VV和VH两种极化方式的10m分辨率影像。针对Sentinel-2首先按照小于20%云含量对数据进行选择(其中越冬期的云含量为小于40%),并按照最小云含量的方式合成每个物候期的影像,通过重采样将影像所有波段的分辨率均采样为10m。表1为影像的具体成像时间和对应的小麦与油菜的物候期。
1.3 野外调查数据
2022年2月24日—2月26日,通过手机GPS定位和现场拍照的方式,对研究区内10个镇分别进行采样,共采集小麦样本点124个、油菜样本点189个。结合实地采集的样本点和2022年3月初 GF-1 PMS经过数据预处理后的2m分辨率研究区影像,使用目视解译将所采集的点绘制成面,并增加建筑用地、林地、水体以及未利用土地的样本,构成样本集。模型训练时均使用10折交叉验证的方式分配训练集和测试集。图2为外业采集的样本点分布。
2 研究方法
2.1 特征提取
特征选择在遥感分类的过程中尤为重要,科学地选取特征可以有效地提高遥感分类的精度[19]。本文选取光谱特征、植被指数、红边指数、极化特征和纹理特征构建特征集。
实验选取Sentinel-2的红、绿、蓝三个可见光波段,三个红边波段,两个近红外波段,两个短波红外波段共10个波段构建光谱特征,通过波段运算构建8个植被指数特征,针对植被非常敏感的红边波段,构建8个红边指数特征,表2为本文构建的植被指数和红边指数。
仅使用光谱特征和指数特征难以解决“同物异谱,异物同谱”现象,有研究者认为联合光学和雷达数据,加入极化特征[13-14]和纹理特征[20]。可以有效改善“同物异谱,异物同谱”现象。使用Sentinel-1的VV极化和VH极化的后向散射系数构建极化特征。选取精度验证较高的灰度共生矩阵GLCM提取影像的纹理信息,并使用方差(Var)、对比度(Contrast)、差异性(Diss)、熵(Ent)、角二阶矩(Asm)、相关性(Corr)等6个纹理计算量对影像进行定量分析。灰度共生矩阵的计算和方向有关,本文使用4个方向统计量叠加的均值消除角度影响。为避免纹理分析中统计分量较多且存在一定的信息交叉,考虑到本文研究对象为小麦和油菜两种植被,因此仅提取常被用于计算植被覆盖度的NDVI的纹理特征。表3为本文构建的34个特征。
2.2 特征优选方法
使用过多的特征参与分类,容易导致信息冗余以及“维数灾难”,从而导致分类性能下降,因此非常有必要对特征变量进行特征选择。本文使用随机森林算法对特征进行选择,随机森林算法不仅可以实现遥感影像的分类,而且在特征降维等方面也发挥着重要的作用[21]。本文使用GINI系数作为评价指标,GINI系数是衡量随机样本在样本集中被错误分类的概率的指标。GINI系数越小,集合中所选择的样本被错误分类的概率就越小,当样本集中的所有样本都属于一个类别时,GINI系数为0。 随机森林算法中的每棵树都是决策树,当树选择使用一个特征进行拆分时,它需要计算GINI系数来衡量拆分前后的样本集的纯度,分割后左右分支的基尼指数越小,使用该特征进行分离的准确度就越高。GINI系数的计算公式为
式中,[GIm]是分枝前节点的 GINI 系数,[K]表示类别个数,[pmk]表示节点[m]中类别[k]所占的比例。特征[Xj]在节点[m]时的重要性为
式中,[GIl]和 [GIr]是分枝后两个新节点的 GINI 系数。特征[Xj]在第[i]棵树的重要性为
式中,[M]为特征[Xj]在决策树中出现的节点集合。假设随机森林中树的数目为[n],则特征[Xj]的特征重要性评分为
2.3 分类方法
在遥感图像分类的研究中,特征的选取和方法的选择对结果都会产生重要影响,不同的机器学习分类器在不同的研究中往往会呈现不同的结果[22]。本文基于GEE提供的最小距离(Minimum Distance, MD)、决策树(Classification Algorithms and Regression Trees, CART)、随机森林(Random Forest, RF)、支持向量机(Support Vector Machine, SVM)四种分类器,分别讨论不同物候期所适合的最优分类器。
最小距离法依据未知类别像元到已知总体均值中心的距离进行分类,距离越小,划分至该类的概率越大[22]。GEE提供3种“距离”计算,分别是欧式距离,余弦距离和马氏距离。本文使用马氏距离进行分类。
CART是由Breiman[23]提出的一种快速构建分类树的算法,决策树是通过构建二叉树实现输入值的归类,通过算法确定二叉树的节点,以能够划分样本数据的最优特征作为节点对样本二分和细化,通过递归实现分类树的构建。
RF不仅可以用于特征选择,而且具有良好的分类精度和稳健性[21]。RF通过集成学习的思想将多棵决策树集成在一起,每棵决策树都是一个分类器,都会产生对应的分类结果,RF将多棵决策树的分类结果通过投票的方式决定最终的分类结果[24]。随机森林方法通常不需要复杂的参数调制过程,树的数量([nt])是关键的参数,当较大时表示使用的决策树数量更多,算法更为复杂[18],通过格网搜索的方法确定设置在四个物候期的最优值,分别为100、120、130、90。
SVM算法的关键参数包括核函数类型、惩罚系数[C]以及相关核参数[gamma]。现有研究表明,径向核函数(RBF)相比于线性核函数、多项式核函数等,对具有突出非线性特征的图像具有更好的性能[18]。因此,本次实验均使用RBF核作为核函数。通过格网搜索的方法确定[C]和[gamma]在不同物候期的最优值(表4)。
2.4 评价指标
混淆矩阵常被用于评价分类结果和实际值之间的混淆程度。本文主要使用目前普遍采用的总体精度(OA)、Kappa系数、生产者精度(PA)、用户精度(UA)以及F1_Score作为评价指标。
3 结果和分析
3.1 特征优选结果
随机森林算法可以计算出每次参与运算特征的重要性,本文使用10折交叉验证的方式计算34个特征在10次实验重要性的均值。为确定最优特征的数量,根据特征重要性的均值从大到小进行排序,依次加入实验,计算每次实验的OA、Kappa的均值以及小麥和油菜F1-Score的均值,图3为四个物候期各特征重要性以及不同特征参与运算所得到的分类结果。
如图3所示,当加入特征达到一定数量时,特征数量的增加对模型精度并不能产生太大的波动。为了在保证实验精度足够高的同时减少特征的冗余,本文在小麦越冬期、返青期、孕穗期、成熟期按照相应特征重要性排序分别选取前15个特征、前11个特征、前11个特征、前12个特征构建对应物候期的最优特征集。表5为四个物候期的最优特征集。
3.2 分类结果及精度评价
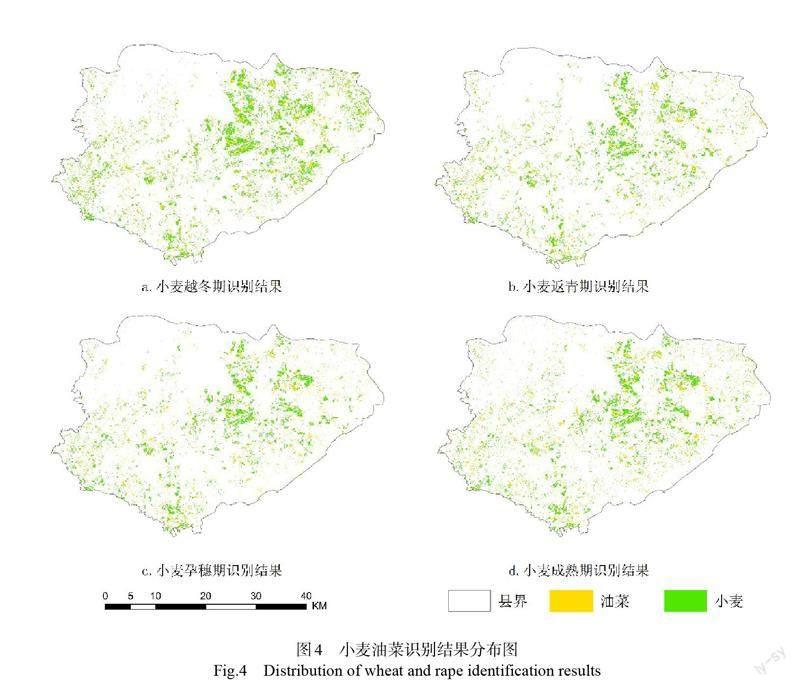
使用优选后的特征集,对比随机森林、支持向量机、决策树、最小距离四种监督分类方法在不同物候期的分类性能。使用十折交叉验证的方式,对比不同方法在最优参数条件下十次交叉验证所得到分类结果的均值。实验结果表明:小麦越冬期分类精度最高的为随机森林,其次为支持向量机和决策树法,最小距离分类所得到的小麦和油菜具有较高的用户精度,但总体精度以及F1_Score、生产者精度都明显低于RF、SVM、CART;小麦返青期随机森林的分类精度最高,其次为支持向量机,决策树和最小距离的分类精度相近,均低于随机森林和支持向量机;小麦孕穗期分类精度最高的为随机森林,其次为支持向量机和决策树,最小距离所得到的精度最低;小麦成熟期分类精度从高到低分别为随机森林、支持向量机、决策树、最小距离。综上所述,在四个物候期内随机森林的分类精度均为最高。表6为四种分类器在四个物候期所识别的精度,图4为在最优特征集和分类器条件下的小麦和油菜的识别结果。
3.3 极化特征对不同物候期分类结果的影响
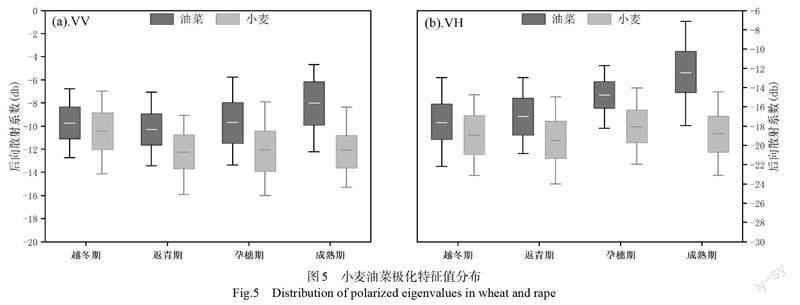
为了评估极化特征在四个物候期对小麦和油菜识别精度的影响,分别提取小麦和油菜在四个物候期Sentinel-1的VV和VH后向散射系数,同时对比四个物候期不加极化特征和加极化特征的实验结果。
图5为四个物候期小麦和油菜VV和VH后向散射系数的箱线图,图中每个矩形框表示后向散射系数15%~85%的取值范围,矩形框中的横线表示对应物候期作物VV、VH后向散射系数的均值,两端横线为对应的最大值和最小值。第一张图(5a)显示的为小麦和油菜四个物候期VV后向散射系数的箱线图,第二张图(5b)显示的为小麦和油菜四个物候期VH后向散射系数的箱线图。在四个物候期油菜VV和VH后向散射系数的均值都大于小麦VV和VH后向散射系数的均值,并且从后向散射系数值的分布区间可以得出,除小麦越冬期有大部分重叠外,剩余三个物候期重叠区域均较小,因此在小麦返青期、小麦孕穗期、小麦成熟期VV和VH极化特征均可作为区分小麦和油菜的特征。
图6为四个物候期不加极化特征和加极化特征随机森林分类器的OA、Kaapa系数、小麦和油菜的F1_Score、小麦和油菜的生产者精度和用户精度的对比图。第一张图(6a)显示,在小麦越冬期加入极化特征,OA、Kaapa系数以及小麦的F1_Score升高了1%,油菜的识别精度略微下降;第二张图(6b)显示,在小麦返青期加入极化特征识别的总体精度以及小麦和油菜的识别精度都升高了1%~2%左右;第三张图(6c)显示,在小麦孕穗期加入极化特征识别的总体精度以及小麦和油菜的识别精度都有所提升,但上升的幅度都较小,在0.5%左右;第四张图(6d)显示,在小麦成熟期加入极化特征识别的总体精度有所提升,但上升的幅度较小,约在0.5%,小麦的识别精度并未发生太大波动,而油菜的识别精度提升了3%左右。因此,在四个物候期加入极化特征均能提高识别的精度,并且在小麦返青期和小麦成熟期更为明显。
3.4 最优分类物候期
图7为四个物候期在最优特征集以及最优分类器条件下的识别精度。四个物候期中小麦孕穗期的OA和Kappa最高,分别为92.91%、91.00%,其次为小麦成熟期,分别为91.93%、89.92%,小麦返青期分别为90.24%、87.61%,小麦越冬期最低,为87.69%、84.53%。四个物候期中小麦识别精度从高到底分别为小麦孕穗期、小麥成熟期、小麦返青期、小麦越冬期,其对应的F1_Score分别为90.86%、85.99%、81.62%、71.84%。四个物候期中油菜识别精度从高到底分别为小麦成熟期、小麦孕穗期、小麦返青期、小麦越冬期,其对应的F1_Score分别为96.81%、95.05%、84.93%、82.73%。综上所述,在小麦孕穗期和小麦成熟期识别精度较高,其次为小麦返青期,在小麦越冬期识别的精度最低。
本文对最优分类物候期、最优特征组合和最优分类方法所识别的结果进行分析。图8为两块典型区域的识别结果,场景一为地块比较零散,种植结构比较复杂的种植区,场景二为种植较为集中的种植区。在两种场景下,将识别结果与实际种植分布进行比较,识别的结果在两种场景中均没有出现明显的错分和漏分,在地块边界信息的保留方面,识别的结果和实际种植分布仍然有一些差距。
4 结论
本文基于Sentinel-1和Sentinel-2遥感数据对小麦越冬期、返青期、孕穗期、成熟期四个物候期分别构建光谱特征、植被指数特征、红边指数特征、纹理特征以及极化特征等5种基本特征,并通过随机森林算法对每个物候期的特征进行特征优选,构建各物候期的最优特征集;同时对比GEE平台提供的不同分类器,确定不同物候期识别的最优分类器;并探究了Sentinel-1雷达数据在各物候期对识别结果的影响。研究结果表明:
(1)对构建的34个特征进行特征优选,最终确定了在小麦越冬期、返青期、孕穗期、成熟期的最优特征集,如表5所示。
(2)对GEE平台提供的最小距离、决策树、支持向量机、随机森林4种分类器的分类结果进行比较。结果表明,在四个物候期中随机森林的分类精度均为最高。
(3)通过对比加入极化特征和不加入极化特征的识别结果得出,在四个物候期中加入极化特征均能提高识别的精度,其中在小麦的返青期和成熟期更为明显。
(4)通过对比四个物候期在最优特征集和最优分类器条件下的识别结果得出,小麦的孕穗期识别精度>小麦的成熟期识别精度>小麦返青期识别精度>小麦越冬期识别精度,其OA分别为92.91%、91.93%、90.24%、87.69%,Kappa系数分别为91.00%、89.92%、87.61%、84.53%。
(5)在小麦的孕穗期和成熟期的识别精度较高,但在越冬期的识别精度较差,后续将对如何提高越冬期的识别精度开展进一步的分析和探讨。
参考文献
[1] 唐华俊,吴文斌,杨鹏,等.农作物空间格局遥感监测研究进展[J].中国农业科学,2010,43(14):2879-2888.
[2] 季富华,刘佳,王利民.农作物类型遥感识别算法及国产高分卫星应用示例[J].中国农业资源与区划,2021,42(7):254-268.
[3] 许文波,张国平,范锦龙,等.利用MODIS遥感数据监测冬小麦种植面积[J].农业工程学报,2007(12):144-149+325.
[4] 游炯,裴志远,王飞,等.基于改进多元纹理信息模型和GF-1影像的县域冬小麦面积提取[J].农业工程学报,2016,32(13):131-139.
[5] 张晶,占玉林,李如仁.高分一号归一化植被指数时间序列用于冬小麦识别[J].遥感信息,2017,32(1):50-56.
[6] 王利民,刘佳,姚保民,等.基于GF-1影像NDVI年度间相关分析的冬小麦面积变化监测[J].农业工程学报,2018,34(8):184-191.
[7] 王林江,吴炳方,张淼,等.关键生育期冬小麦和油菜遥感分类方法[J].地球信息科学学報,2019,21(7):1121-1131.
[8] 姜楠,张雪红,汶建龙,等.基于高分六号宽幅影像的油菜种植分布区域提取方法[J].地球信息科学学报,2021,23(12):2275-2291.
[9] 张紫荆,华丽,郑萱,等.基于GEE平台与Sentinel-NDVI时序数据江汉平原种植模式提取[J].农业工程学报,2022,38(1):196-202.
[10] SEYDI S T, AMANI M, GHORBANIAN A. A dual attention convolutional neural network for crop classification using time-series sentinel-2 imagery[J]. Remote Sens,2022, 14, 498-522.
[11] 杨泽宇,张洪艳,明金,等.深度学习在高分辨率遥感影像冬油菜提取中的应用[J].测绘通报,2020(9):110-113.
[12] 赵晋陵,詹媛媛,王娟,等.基于SE-UNet的冬小麦种植区域提取方法[J].农业机械学报,2022,53(9):189-196.
[13] 周涛,潘剑君,韩涛,等.基于多时相合成孔径雷达与光学影像的冬小麦种植面积提取[J].农业工程学报,2017,33(10):215-221.
[14] 马战林,刘昌华,薛华柱,等.GEE环境下融合主被动遥感数据的冬小麦识别技术[J].农业机械学报,2021,52(9):195-205.
[15] DENG Y, JIANG W, TANG Z, et al. Long-term changes of open-surface water bodies in the Yangtze River Basin based on the Google Earth Engine cloud platform[J]. Remote Sens, 2019, 11, 2213-2235.
[16] LI Y, NIU Z, XU Z, et al. Construction of high spatial-temporal water body dataset in China based on Sentinel-1 Archives and GEE[J]. Remote Sens, 2020, 12, 2413-2428.
[17] TANG H, LU S, ALI B, et al. Large-scale surface water mapping based on Landsat and Sentinel-1 Images[J]. Water, 2022, 14, 1454-1470.
[18] LI X, ZHANG D, JIANG C, et al. Comparison of lake area extraction algorithms in Qinghai Tibet Plateau leveraging Google Earth Engine and Landsat-9 Data[J]. Remote Sens, 2022, 14, 4612-4637.
[19] LUO H, LI M, DAI S, et al. Combinations of feature selection and machine learning algorithms for object-oriented betel palms and mango plantations classification based on Gaofen-2 Imagery[J]. Remote Sens, 2022, 14, 1757-1780.
[20] 熊皓丽,周小成,汪小钦,等.基于GEE云平台的福建省10 m分辨率茶园专题空间分布制图[J].地球信息科学学报,2021,23(7):1325-1337.
[21] 姚金玺,王浪,李建忠,等.青海诺木洪地区多源遥感及多特征组合地物分类[J].农业工程学报,2022,38(3):247-256.
[22] 李斌,李崇贵,李煜.基于Sentinel-2数据的塞罕坝机械林场落叶松人工林提取[J].林业资源管理,2021(2):117-123.
[23] BREIMAN L, FRIEDMAN J H, OLSHEN R A, et all. Classification and Regression Trees[M]. California: Wadsworth International Group, 1984:1-358.
[24] BREIMAN L. Random forests[J]. Machine Learning, 2001, 45(1): 5-32.
Crop Identification Study Based on Sentinel-1 and Sentinel-2 for Different Phenological Periods
CHANG Zhu1,2, LI Hu1,2, CHEN Dong-hua1,3, LIU Yu-feng3, ZOU Chen1, CHEN Jian1, HAN Wei-jie1
(1. School of Geography and Tourism, Anhui Normal University, Wuhu 241000, China; 2. Anhui Province Engineering Technolog Research Center of Resources Environment and GIS, Wuhu 241000, China;3. School of Computer and Information Engineering, Chuzhou University, Chuzhou 239000, China)
Abstract: In order to reduce the influence of optical data imaging quality in the process of crop extraction, Sentinel-1 and Sentinel-2 data were used based on Google Earth Engine platform to identify wheat and rape respectively in four phenological periods: overwintering period, regreening period, booting period and maturity period. A feature set is constructed by using a random forest method to preferentially select the optimal features from a set of 34 features consisting of spectral features, vegetation index features, red edge index features, texture features and polarisation features. It also compared the recognition results of four classifiers, namely, minimum distance, decision tree, support vector machine and random forest, in the four phenological periods to determine the optimal classifier; and also verified the influence of polarization features on the recognition results in the four phenological periods. The results showed that the optimal classifier was random forest in all four phenological periods; the phenological periods with the highest to lowest recognition accuracy were wheat booting, maturity, regreening and overwintering, with OA of 92.91%, 91.93%, 90.24% and 87.69%, and Kappa coefficients of 91.00%, 89.92%, 87.61% and 84.53%;The inclusion of polarisation features in each of the four phenological periods improved the accuracy of identification, more so in the two phenological periods of wheat, greening and maturity .
Key words: phenological periods; crop identification; Sentinel-1;Sentinel-2; Google Earth Engine; random forest
(責任编辑:巩 劼)
收稿日期:2022-11-22
基金项目:高分辨率对地观测系统科技重大专项(76-Y50G14-0038-22/23);安徽省科技重大专项(202003a06020002);安徽省重点研究与开发计划项目(2021003,2022107020028);安徽省特支计划项目(2019);安徽省高校协同创新项目(GXXT-2021-048);安徽省自然科学基金项目(2208085QD107);安徽省高等学校自然科学研究重点项目(KJ2021A1063);滁州市科技计划项目(2021ZD013).
作者简介:常竹(1998—),男,安徽安庆市人,硕士研究生,主要从事机器学习和深度学习在农业遥感方面的研究;通信作者:李虎(1962—),男,山东德州市人,教授,博士生导师,主要从事国产卫星应用和资源环境遥感方面的研究,E-mail: lihu2881@aliyun.com.
引用格式:常竹,李虎,陈冬花,等. 基于Sentinel-1和Sentinel-2的不同物候期农作物识别研究[J].安徽师范大学学报(自然科学版),2024,33-43(1):33-43.
猜你喜欢
热带作物学报(2022年6期)2022-07-08
现代财经-天津财经大学学报(2022年5期)2022-06-01
房地产导刊(2020年9期)2020-10-28
中国果树(2020年2期)2020-07-25
电子测试(2017年15期)2017-12-18
西南农业学报(2017年5期)2017-06-23
河北林业科技(2016年5期)2016-11-08
西南农业学报(2016年5期)2016-05-17
浙江柑橘(2016年4期)2016-03-11
电源技术(2015年1期)2015-08-22
