基于改进鲸鱼算法的搬运机器人运动规划
2024-04-23 19:24李静熊瑞平胡英达周程胜巫启源
机械 2024年2期
李静 熊瑞平 胡英达 周程胜 巫启源


摘要:针对搬运机器人搬运效率不足、稳定性效果不好等问题,使用改进鲸鱼优化算法的时间最优运动规划方法进行解决。首先将机器人模型导入MATLAB中,根据相关算法计算出机器人的空间范围,从空间范围中选取实际目标点并转换到关节空间,在关节空间中使用“四次-三次-四次”插值多项式构造机器人的轨迹,然后将各关节的角速度、角加速度作为约束条件,采用改进的鲸鱼优化算法对轨迹进行优化,缩短机器人运行时间。通过仿真实验,改进的鲸鱼算法较PSO算法规划时间缩短约30%,较标准的鲸鱼算法规划时间缩短约17%,有效提升了搬运机器人在搬运方面的效率和稳定性。
关键词:搬运机器人;运动规划;多项式插值;时间最优;鲸鱼算法
中图分类号:TP242.3 文献标志码:A doi:10.3969/j.issn.1006-0316.2024.02.001
文章编号:1006-0316 (2024) 02-0001-07
Trajectory Planning of Handling Robot Based on Improved Whale Algorithm
LI Jing,XIONG Ruiping,HU Yingda,ZHOU Chengsheng,WU Qiyuan
( School of Mechanical Engineering, Sichuan University, Chengdu 610041, China )
Abstract:A time-optimal trajectory planning method based on improved whale optimization algorithm is proposed to solve the problems of low efficiency and insufficient stability of the robot. Firstly, the robot model is imported into MATLAB, and the space range of the robot is calculated according to the relevant algorithm. The actual target points are selected from the space range and converted to the joint space. In the joint space, the “quartic-cubic-quartic” interpolation polynomial is used to construct the robot trajectory, and then the angular velocity and angular acceleration of each joint are taken as the constraint conditions. The improved whale optimization algorithm is used to optimize the trajectory and shorten the running time of the robot. Through simulation experiments, the planning time of the improved whale algorithm is about 30% shorter than that of the PSO algorithm, and about 17% shorter than that of the standard whale algorithm, which can effectively improve the handling efficiency and stability of the robot.
Key words:handling robot;trajectory planning;polynomial interpolation;optimal time;whale algorithm
随着我国工业自动化水平的不断提高,工业机器人将会逐步取代更多原本需要人工作业的行业。其中,搬运机器人凭借着高精准、高效率、大负载,已得到了广泛应用,大大提高了生产效率、经济效益、减轻了工人负担[1]。在近代机械技术的快速发展中,搬运物流线运用于各个领域,因此对于搬运机器人的研究比较重要。
对于机器人轨迹规划,目前一般先采用插值算法对机器人运动路径进行插值,再采用合适的群智算法对其进行轨迹优化[2]。孙玥等[3]采用五次多项式插值法对搬运机器人进行轨迹规划,该方法实现了速度和加速度的平滑过渡,末端运行精度得到很大提高,但运算相对复杂。韩顺杰等[4]采用三次多项式函数进行轨迹规划,结构简单,易于实现,但其二阶导数不连续导致机械手运行不稳定。陈晗等[5]提出5-7-5次分段多项式与复合型法相结合的方式,提高了效率,降低了能耗,但运算相对复杂,高阶次更容易引起“龙格”效应的产生。Zhang等[6]采用权重系数法构成目标函数,并采用粒子群算法对五自由度机械臂进行运动规划。以上研究均未考虑智能算法的收敛速率以及陷入局部最优的问题。
本文以库卡重载搬运机器人为研究对象,首先根据铅锭搬运工厂流水线的实际工况提出4-3-4插值多项式函数对机器人的关节空间进行轨迹规划。该插值多项式既解决了3次多项式二阶导数不连续的问题,也解决了5次多项式运算复杂的问题。然后通过改进的鲸鱼算法对三段多项式的时间进行寻优,在確保各关节的位置、速度、加速度连续可控的基础上保证搬运效率最高且稳定性更优。
1 4-3-4分段插值函数的构造
由于笛卡尔空间轨迹规划缺乏关节的旋转方向和角度信息,而关节空间运动规划是指给定关节角的约束条件(起点、终点或中间节点的位置、速度、加速度等),生成各关节变量变化曲线的过程,因此在关节空间进行运动规划。常用的轨迹插值计算方法有三次多项式插值、五次多项式插值和高阶多项式插值[7]。三次多项式不能保证加速度的连续;单条五次多项式轨迹适应能力较差,容易因为一两个点造成整个曲线的变形;高阶的七次规划曲线,求解较复杂,且会出现龙格现象,其求解出的值准确度更低。为了保证搬运机器人在实际工作中轨迹的连续平稳且高效运行,选取4-3-4插值多项式进行轨迹规划。
4-3-4多项式插值位移、速度、加速度函数分别为:
分段插值多项式条件为起始点、两个中间点和终点的位移、速度、加速度,且起始点与终点的速度和加速度均为零。由上述条件可以求出分段多项式的14个系数,系数的推导公式具体如式(4)~(6)所示。
四个插值点的位置条件使用:
(4)
四个插值点的速度条件使用:
(5)
四个插值点的加速度条件使用:
(6)
2 改进鲸鱼优化算法的轨迹优化
2.1 运动学约束与适应度函数
选取的4-3-4插值多项式由三段构成,各段时间分别为t1、t2、t3。插值多項式系数求解依赖于各段的时间和笛卡尔空间的插值点。笛卡尔空间的插值点确定之后,关键是选取合适的时间进行机械臂时间最优轨迹规划。每个关节的优化目标函数和约束条件为:
(7)
式中:为优化目标函数;、分别为角速度和角加速度;、分别为角速度和角加速度限制
2.2 改进的鲸鱼优化算法
2.2.1 标准的鲸鱼优化算法
鲸鱼算法是参考座头鲸在水下搜寻猎物的方式,其进化过程分为局部搜索和全局搜索。局部搜索的更新机制是泡网攻击和包围捕食,全局搜索则采用随机更新的方式[8]。
2.2.2 改进的鲸鱼优化算法
标准鲸鱼优化算法由于本身参数设定大多为线性且探索能力不足,存在以下缺陷:①求解准确度较低;②收敛速度较慢;③会陷入局部最优。针对这些缺陷进行如下改进。
(1)准反射学习机制
该学习机制是基于反向学习和准反向学习提出的。将该机制用于鲸鱼算法种群的初始化,能提高种群的质量和多样性[9]。
其中:LB为下限;UB为上限;r为0~1之间的随机数。
最后对两种初始化种群计算出的适应度值按照从小到大排序,从升序中挑选前N个适应度最好的初始化种群作为初始化鲸鱼种群。
(2)非线性收敛因子
由于鲸鱼优化算法的探索能力和收敛因子的关系密切,因此对线性收敛因子进行一定的改进以提高算法的探索能力,最终提出:
(4)引入非线性权重
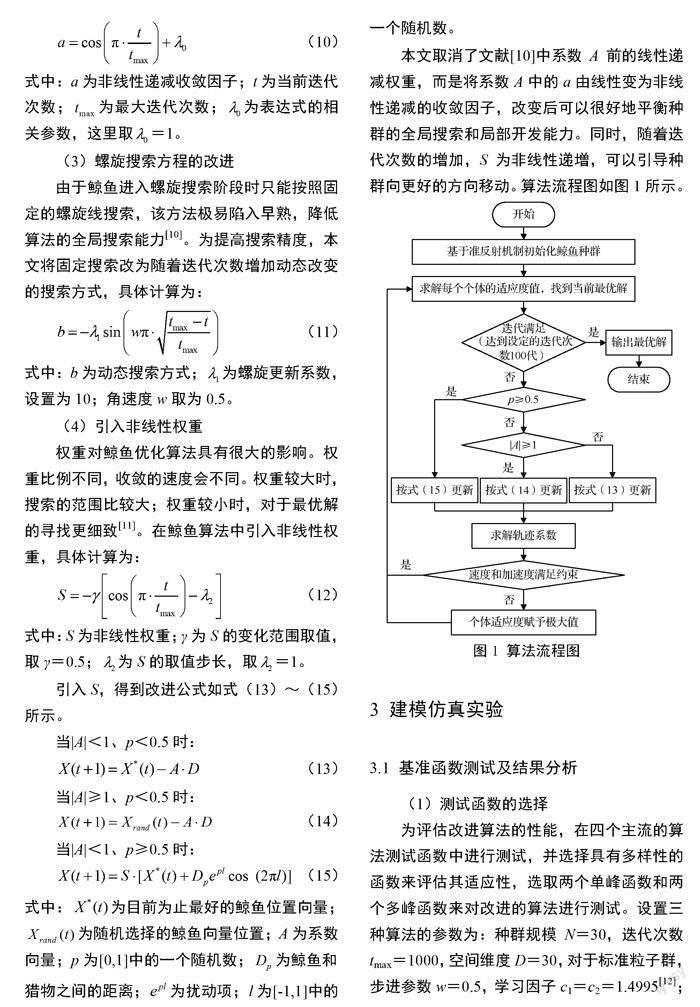
本文取消了文献[10]中系数A前的线性递减权重,而是将系数A中的a由线性变为非线性递减的收敛因子,改变后可以很好地平衡种群的全局搜索和局部开发能力。同时,随着迭代次数的增加,S为非线性递增,可以引导种群向更好的方向移动。算法流程图如图1所示。
3 建模仿真实验
3.1 基准函数测试及结果分析
(1)测试函数的选择
为评估改进算法的性能,在四个主流的算法测试函数中进行测试,并选择具有多样性的函数来评估其适应性,选取两个单峰函数和两个多峰函数来对改进的算法进行测试。设置三种算法的参数为:种群规模N=30,迭代次数tmax=1000,空间维度D=30,对于标准粒子群,步进参数w=0.5,学习因子c1=c2=1.4995[12];测试函数如式(16)所示,四个测试函数的维度和理论值分别30和0。
(2)结果分析
四个测试函数的结果如表1所示。可以看出,改进鲸鱼优化算法的寻优能力远好于标准鲸鱼优化算法和标准粒子群算法。标准粒子群算法在四个测试函数中均会不同程度地陷入局部最优,标准鲸鱼算法在F1和F2两个单峰测试函数中会不同程度地陷入局部最优,而使用改进鲸鱼优化算法的四个测试函数均取得理论最优值。改进鲸鱼算法在收敛速度和求解精度方面很大程度上也优于其他两个算法。由此验证了本文改进算法的有效性。
3.2 搬运机器人的仿真实验
选取库卡KR90 R2700 pro型号作为研究对象,其连杆参数默认设置为该型号的连杆参数。搬运机器人的工作工况如图2所示。
搬运机器人的搬运对象是铅锭,机器人将铅锭从工作台搬运到物流线的输送机上进行运送。将选取的库卡机器人连杆参数导入MATLAB中,得到搬运机器人的仿真模型如图3所示。
然后进一步得到机器人的工作空间范围,根据工况从工作空间中选取笛卡尔坐标系下的四个目标点,如表2所示。
通过求逆解获得关节空间中各关节对应的插值点,如表3所示。
使用MATLAB绘制出三种算法的适应度曲线对比图,如图4所示。可以看出,改进的鲸鱼算法在收敛精度和收敛速度上都优于标准鲸鱼算法和标准粒子群算法。
采用改进的鲸鱼算法对三段插值多项式进行优化,得到各关节最优插值时间,如表4所示。为确保机器人各关节以同样的时间到达目标点位置,选取各关节最优插值时间的最大值,为:t1=0.3731 s、t2=0.59411 s、t3=0.2489 s。
通过控制插值时间的最大值,精确绘制出各关节的角位移、角速度和角加速度曲线,实现更加准确和稳定的运动,如图5~7所示。可以看出,改进后的鲸鱼算法在缩短搬运时间的基础上得到的角位移、角速度和角加速度曲线较为平滑,同时角速度、角加速度曲线也满足约束条件,提高了搬运机器人的搬运效率和稳定性。
4 结语
对铅锭搬运机器人进行关节空间轨迹规划,建立插值分段多项式函数,从优化初始种群、平衡全局与局部探索能力以及更好地引导种群三方面改进鲸鱼算法。
为实现时间最优化,采用改进的鲸鱼算法对模型进行优化处理。由仿真结果可知,改进的鲸鱼算法有很好的准确度和较高的收敛速度,最终在保证机器人运行稳定的基础上让机器人有更高的效率,为后面进一步深入研究提供了参考。
参考文献:
[1]吕鲲,陈宗元,张业明. 装砖码垛机器人时间-冲击最优轨迹规划[J]. 机械工程师,2019(9):1-4,8.
[2]NAGY ?KOS,VAJK ISTV?N. Nonconvex Time-Optimal Trajectory Planning for Robot Manipulators[J]. Journal of Dynamic Systems, Measurement, and Control,2019,141(11):1362-1368.
[3]孫玥,魏欣. 基于五次多项式的码垛机器人轨迹规划[J]. 包装工程,2017,38(21):159-163.
[4]韩顺杰,单新超,于爱君,等. 基于改进粒子群算法的工业机器人轨迹规划[J]. 制造技术与机床,2021(4):9-14.
[5]陈晗,李林升. 基于复合形法的时间最优机械臂轨迹规划[J].
机械传动,2019,43(3):72-75,94.
[6]ZHANG Haojian,WANG Yunkuan,ZHENG Jun,et al. Path Planning of Industrial Robot Based on Improved RRT Algorithm in Complex Environments[J]. IEEE Access,2018(6):53296-53306.
[7]刘杰,卞新宇,王晓勇,等. 改进鲸鱼优化算法的机器人时间最优轨迹规划[J]. 机械设计与制造,2023(2):270-275.
[8]武泽权,牟永敏. 一种改进的鲸鱼优化算法[J]. 计算机应用研究,2020,37(12):3618-3621.
[9]FAN Qian,CHEN Zhenjian,XIA Zhanghua. A novel quasi-reflected Harris hawks optimization algorithm for global optimization problems[J]. Soft Computing,2020,24(19):14825-14843.
[10]吴泽忠,宋菲. 基于改进螺旋更新位置模型的鲸鱼优化算法[J]. 系统工程理论与实践,2019,39(11):2928-2944.
[11]赵传武,黄宝柱,阎跃观,等. 一种非线性权重的自适应鲸鱼优化算法[J]. 计算机技术与发展,2020,30(10):7-13.
[12]袁锦涛,刘军,邹树梁. 基于粒子群算法的工业机器人多目标最优轨迹规划[J]. 工业仪表与自动化装置,2021(5):73-79.