房建施工塔机防碰撞的机器视觉监测预警方法
2024-04-24 10:11王凯
工程机械与维修 2024年1期
王凯

摘要:简要介绍传统的塔机防碰撞监测预警方法及其不足之处,详细阐述了房建施工塔机基于机器视觉技术的监测预警方法的技术特点、基础监测预警指标的设置、布设多层级监测预警节点、建立塔机防碰撞监测预警模型、监测锁定与监测预警等主要内容,阐述了对该监测预警方法进行测试的目的、测试准备、测试过程及其结果。测试结果表明,采用机器视觉技术对塔机防碰撞进行监测预警方法,效果好、针对性强、误差可控,具有一定的实际应用价值。
关键词:房建工程;塔机施工;防碰撞;机器视觉;监测预警
0 引言
在房建等工程施工中,塔机是十分重要且关键的设备,塔机的使用频率很高。但是在塔机使用过程中,会出现一些操作控制方面的问题,例如塔机碰撞引起塔臂断裂以及操控系统失灵等。塔机碰撞会引发塔机损坏、材料损失甚至人员伤亡,在一定程度上阻碍了工程进度、影响了工程质量和企业效益。因此塔机必须配备防碰撞监测预警装置。
1 传统的塔机防碰撞监测预警方法
传统的塔机防碰撞监测预警方法,如北斗定位塔机防碰撞监测预警方法,塔机与建筑物等周边物体交会防碰撞监测预警方法等,虽然可以实现预期的任务及目标,但是缺乏针对性与稳定性,在不同的施工环境下,较难进行预警的搭接与点位的锁定,较容易受到外部环境及特定因素的影响[1]。不仅如此,当前所设计的防碰撞监测预警方法一般是单向的,实际应用测定时的效率较低,可控度不高,影响最终的监测预警结果。
2 基于机器视觉技术的监测预警方法
2.1 技术特点
为克服上述塔机防碰撞监测预警方法的不足,设计了基于机器视觉技术的房建施工塔机防碰撞监测预警方法并进行了验证分析。所谓机器视觉技术,主要指的是利用机器代替人眼来做测量和判断。
将机器视觉技术与塔机防碰撞监测预警方法相融合,扩大了实际预警范围,形成了更加灵活、多变的预警结构,可从多个角度进行实际监测,推动相关技术和行业迈入一个新的台阶[2]。
2.2 基础监测预警指标的设置
通常情况下,在进行房建施工过程中,塔机的监测预警装置可以保障其施工过程中的稳定性与可靠性,但是需要进行基础监测预警指标的设置[3]。这就需要对塔机的实际防撞位置和定向点位进行标定处理,并计算出碰撞的可控制距离,该距离一般设置在0.25~0.3m之间[4]。以此为基础,依据监测预警的实际需求及标准,进行预警指标与参数的设置。阶段性基础监测预警数值的设置如表1所示。
根据表1完成对阶段性基础监测预警数值的设置,然后以此为基础,对当前的监测预警环境和条件进行调整调度。需要注意的是,所设计的监测预警标准并不是固定的,可以依据自身的施工需求作出调整,具有较强的灵活性[5]。
2.3 布设多层级监测预警节点
传统的塔机防碰撞监测预警节点设置方式大多是单向,虽然可以实现预期的预警任务,但是缺乏针对性和稳定性,获取的预警数值也并不精准可靠[6]。为解决这一问题,结合实际预警需求和标准,将所设计的节点预警方式分为多层级,这样可以加强对监测情况的多维控制,进一步满足实际的预警要求。为此,需计算出监测预警节点的布设间距,具体计算如公式(1)所示。
(1)
式中:P表示监测预警节点布设间距, 表示转换监测均值,ε表示可控监测差,σ表示预警次数,χ表示预警响应时间,δ表示碰撞距离,ρ表示重复预警范围。
结合当前的测试结果,依据设置的间距,调整节点的具体位置。同时,根据监测位置和預警方向的变化,需将当前的预警标准划分为多个层级,以便更好地将预警的目标进行匹配,形成相对应的预警关系,为后续数据、信息采集,甚至对异常碰撞位置的标定提供参考。
2.4 建立塔机防碰撞监测预警模型
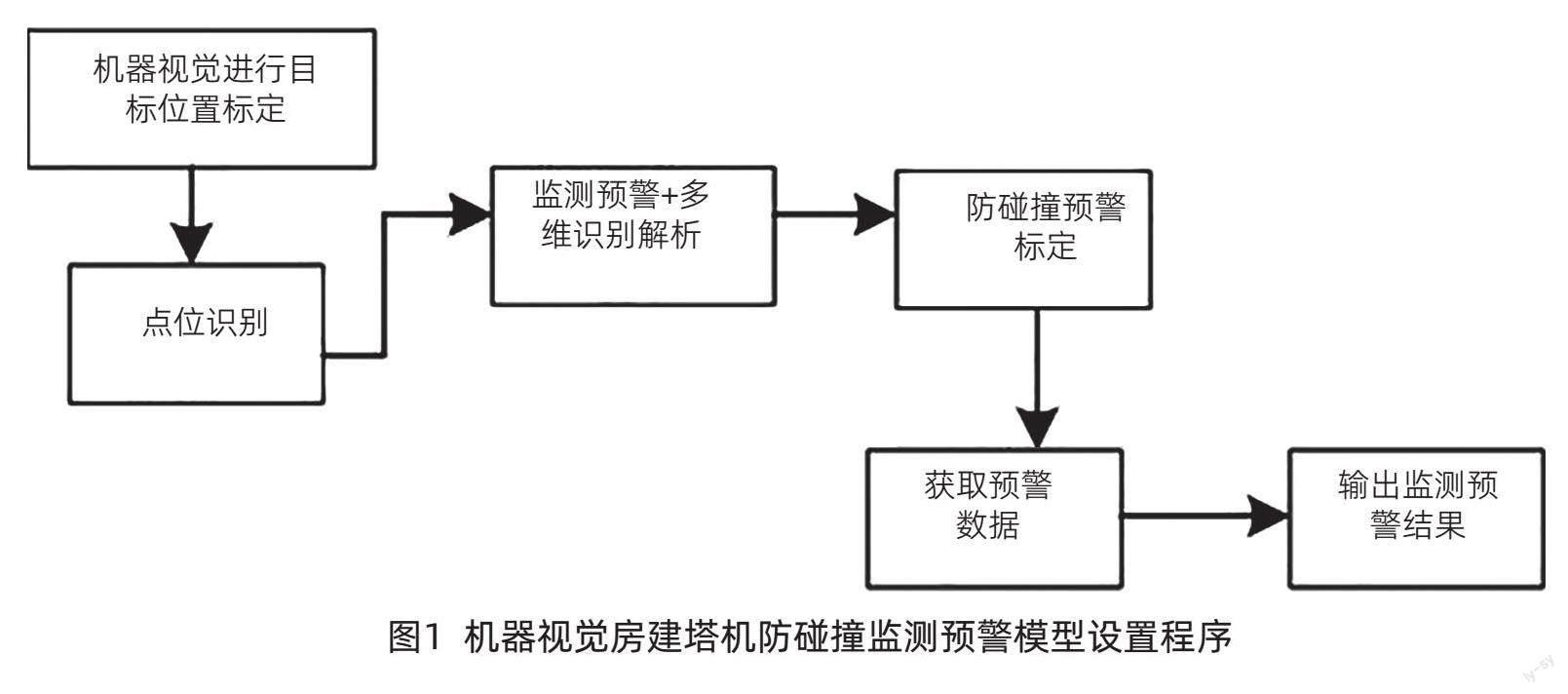
采用机器视觉技术,构建房建施工塔机防碰撞监测预警模型。利用部署的监测预警节点进行数据信息的采集,为此需要在当前的模型中设计一个机器视觉监测矩阵,进行预警限值的计算,并将其设定为预警的限制标准,以构建对应的预警模型结构。机器视觉房建塔机防碰撞监测预警模型设置程序如图1所示。
根据图1展示的设置程序,完成对机器视觉房建塔机防碰撞监测预警模型的设计与验证分析。然后以此为基础,通过机器视觉技术,处理各个阶层的防碰撞监测预警目标,并获取模糊的预警结果,以待后续进行修正处理。
2.5 监测锁定与监测预警
所谓监测锁定,主要指的是针对预警模型处理的结果进行修正的一种方式。当前对于塔机防碰撞的位置以及距离进行标定,作为初始锁定的目标,在实际建设施工的过程中,每一个阶段均需要进行对应的锁定处理,将各个阶段的监测锁定数值进行汇总整合,并利用预警的标准作出比对,以此来消除各个环节的预警误差,强化预警结果的真实性与可靠性,进一步扩大实际的监测预警范围,从多个角度保证预警结果的稳定与可靠,营造更为真实的监测预警环境。
3 监测预警方法测试
3.1 测试目的
此次主要是对基于机器视觉的房建施工塔机防碰撞监测预警方法的实际应用效果进行分析与验证研究。考虑到最终测试结果的真实性与可靠性,采用对比的方式展开分析,并选定Q房建工程作为测试的主要目标对象。根据当前测定需求及标准的变化,对最终得出的测试结果比照研究。然后综合机器视觉技术,进行测试环境的关联与搭建。
3.2 测试准备
设定了北斗定位塔机防碰撞监测预警测试组、塔机与建筑物等周边物体交会防碰撞监测预警测试组,以及机器视觉塔机防碰撞监测预警测试组。
结合机器视觉技术,对选定的Q房建工程作为测试的主要目标,并建立对应的测试环境与内置搭接结构。根据监测预警的需求,可对塔机的应用范围进行划定,并在可控的范围之内进行一定数量监测节点的布设。需要注意的是,监测节点的设定虽然是独立的,但是实际应用的过程中尽量将节点搭接在一起,以便于后续数据、信息的采集与汇总。
在当前的检测系统之中接入一个定向的承接识别程序,并在塔机的操控系统之中增设传感器、声光报警器、记录仪以及外侧传感器等辅助设备。接下来,进行预警监测指标及参数的设置,如表2所示。
根据表2,完成对预警监测指标及参数的设置与分析。以此为基础,通过机器视觉技术设计一个多层级的监测预警结构,并导入制定的预警目标,完成基础测试环境及条件的设置,然后综合机器视觉技术,进行具体的测试与验证。
3.3 测试过程及结果分析
在上述搭建的测试环境之中,结合机器视觉技术,对选定的Q房建工程进行测试与验证。因为该工程的覆盖面积较大,所以塔机的应用范围会更广一些。將塔机的应用测定区域划分为4个,并利用各个区域设置的节点进行基础数据、信息的采集,预设监测预警的对应周期,以待后续使用。利用设定的传感器及声光报警器等装置,首先进行防碰撞报警距离的测试,得出以下数据结果如表3所示。
根据表3,完成对塔机防碰撞报警距离的设置,依据上述情况,利用机器视觉技术,设置可控的视觉监测预警范围,并分析计算出最终的单元监测预警耗时,具体如公式(2)所示:
(2)
式中:D表示单元监测预警耗时,m表示可控监测范围,n表示视觉识别区域,u表示识别预警次数,χ表示机器视觉标定距离。结合当前的测定,完成对测试结果的分析,如图2所示。
根据图2完成对测试结果的分析。对塔机与建筑物等周边物体交会进行防碰撞监测预警测试对比,此次所设计的机器视觉塔机防碰撞监测预警测试组,最终得出的单元监测预警耗时被控制在0.2s以下,这说明在机器视觉技术的辅助下,所设计的监测预警方法效果更佳、针对性更强、误差可控,具有实际的应用价值。
4 结束语
综合上述分析可知,将设计的基于机器视觉的房建施工塔机防碰撞监测预警模式,与传统的塔机防碰撞监测预警模式对比。前者在机器视觉技术的辅助与支持下,所设计的监测预警结构更为多元化、稳定化,自身针对性得到了极大地提升。
基于机器视觉的房建施工塔机防碰撞监测预警模式,可在不同的工程施工背景下,对塔机的可应用位置进行多维标定。利用过程中获取准确的数据和位置信息,有利于优化预警结构,提升预警精度,给予塔机操作人员提供更为精准可靠的预警信号,从多方面保证塔机群的安全作业。
参考文献
[1] 胡艳,冯晶晶,姚杰.V2X技术在城市交叉口防碰撞预警中
的应用[J].西华大学学报(自然科学版),2022,41(3):85-92.
[2] 王文,杨昆,何云,等.煤-气交叉开采区天然气井防碰撞
预警技术研究[J].矿业科学学报,2022,7(4):490-497.
[3] 彭飞,王艳梅,凤鹏飞.冰雪天气下基于GIS的车辆防碰撞
预警模型[J].武汉轻工大学学报,2022,41(2):97-101.
[4] 李永山,刘发永,梁勇,等.基于马尔可夫过程的水电工程
门塔机群防碰撞预警分析技术[J].四川水利,2021,42(5):
33-36.
[5] 顾昊伦,王军年,邱鹏铖,等.基于RFID车-车通信的防
碰撞预警系统设计[J].现代交通技术,2021,18(3):68-73.
[6] 周骆,刘镇.基于深度学习的多源数据融合下的汽渡防碰撞
预警方法[J].舰船电子工程,2021,41(4):150-155.
猜你喜欢
中华建设科技(2016年10期)2016-12-14
人间(2016年30期)2016-12-03
中小企业管理与科技·上旬刊(2016年11期)2016-11-28
中小企业管理与科技·上旬刊(2016年11期)2016-11-28
人间(2016年24期)2016-11-23
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
企业导报(2016年10期)2016-06-04
电脑知识与技术(2016年8期)2016-05-19