
隶属度确定对模糊控制系统稳定性影响的研究
2009-08-16 08:45李斌
长江科学院院报 2009年8期
李 斌
(华北水利水电学院电力学院,郑州 450011)
隶属度确定对模糊控制系统稳定性影响的研究
李 斌
(华北水利水电学院电力学院,郑州 450011)
结合模糊控制和PID算法的优点,提出并设计了模糊PID控制器,利用MATLAB软件对采用此模糊PID控制器的水轮机调节系统进行仿真研究。仿真研究结果表明,合适的隶属度对模糊PID控制系统无论是在系统响应速度,还是稳定性上都有明显的提高。
水轮机调节系统;隶属度确定;模糊控制
由于水轮机调节系统存在很大程度的非线性、大滞后和参数时变性。采用传统的PID控制存在很大的困难。模糊控制的优点就是能够得到较好的动态响应特性,并且无需知道被控对象的数学模型,适应性强,上升时间快,鲁棒性好。但模糊控制受模糊规则有限等级的限制,容易引起误差。本文结合模糊控制和PID算法的优点,提出并设计了模糊PID控制器,通过对PID参数的模糊整定进一步完善了PID控制的性能。同时还结合实例深入探讨了隶属度的选取对模糊控制系统稳定性的影响。
1 模糊PID控制原理简介
模糊PID控制是把变参规则的条件、操作用模糊集来表示,并把这些模糊控制规则以及有关信息作为知识存入知识库中,然后计算机根据系统的实际运行情况,运用模糊推理,自动实现PID参数的在线调整。模糊PID控制器有多种工作形式,但其工作原理基本一致。
我们所设计的模糊自适应PID控制器以误差e和误差的变化率ec=d e/d t作为输入,以不同的e和ec为依据对PID参数进行自整定,达到最佳的控制效果[1]。
2 控制器的结构
模糊PID控制器的基本结构如图1所示,这是一个基本的模糊PID参数自整定控制器。模糊PID参数自整定就是找出Kp,Ki,Kd3个参数与e和ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理来对3个参数进行在线修正,以使控制系统有良好的动、静态性能。

图1 模糊自适应整定PID控制器结构图Fig.1 Structure diagram of fuzzy adaptive PID controller
通常,PID控制器的控制算式[2,3]可按下述方法求得,参数调整的基本原则如下:
(1)当|e|较大时,取Ki=0,分离积分项。这样既可以消除瞬时变大的误差e,又避免出现较大的超调,产生积分饱和。
(2)当|e|和|ec|中等大小时,为使系统具有较小的超调,Kp取小一些,Ki取值适当,Kd要大小适中,以保证系统响应速度。这时所用的控制器实际上就是模糊自适应整定PID控制器。
(3)当|e|较小接近设定值时,为使系统具有良好的稳态性,分离模糊控制项。这时所用的控制器实际上就是经典PID控制器。
3 控制器的设计
在模糊控制系统中,模糊控制器的设计是系统设计的核心,因为它的好坏将直接影响到所输出的控制量,从而影响系统的控制精度。设计一个模糊PID控制器主要需完成以下3个任务,即精确量的模糊化、模糊推理和反模糊化。
3.1 精确量的模糊化
模糊控制器设计的核心是总结工程设计人员的技术知识和实际操作的经验,建立合适的模糊规则表,也即得到分别整定Kp,Ki,Kd3个参数的模糊整定表,进而根据如下方法进行Kp,Ki,Kd的自适应校正。
根据要求,用于PID参数调整的模糊控制器采用二输入三输出形式。该控制器以e和ec作为输入,以Kp,Ki,Kd作为输出。
由于e和ec可正可负,它们可以分别定义模糊集:“负大(NB)”、“负中(NM)”、“负小(NS)”、“零(Z)”、“正小(PS)”、“正中(PM)”、“正大(PB)”。
3.2 模糊推理
模糊推理包括建立规则库和进行推理决策两部分。确定模糊规则的中心原则是必须保证控制器的输出能够使系统输出响应的动、静态特性达到最佳。
调节前期,适当加大Kp,提高响应速度;适当减少Ki,提高响应速度;加大微分作用Kd,抑制超调;中期Kp适中,兼顾稳定性与控制精度;Ki适中,避免影响稳定性;由于控制特性对Kd比较敏感,Kd适当减小;后期Kp减小以减少静差,抑制超调;Ki适当加大以减少静差,提高精度;Kd应减小以减弱被控过程的制动作用。根据上述原则可列出相应的Kp,Ki,Kd模糊规则表。
3.3 反模糊化
反模糊化是把语言表达的模糊量回到精确的数值。即是根据输出模糊子集的隶属度计算输出的确定值。首先获得某个时刻的e和ec值。根据它们的隶属度函数[4,5]曲线得到隶属度。再根据模糊控制规则表进行相应的推理计算,得出Kp,Ki,Kd各语言值的对应隶属度。最后采用重心法进行精确化的计算,就可得出Kp,Ki,Kd修正值,代入下式进行调整:

式中:Kp’,Ki’,Kd’为原先整定好的PID参数,而ΔKp,ΔKi,ΔKd为模糊控制器3个输出,在参数整定过程中,要充分考虑在不同时刻3个参数的作用以及相互之间的相互关系。一般情况下,要经过充分的试验和仿真研究,以便获得准确的模糊控制规则。
4 仿真与计算
根据上面建立的模型,基于某一实际电站水轮机调节系统[6],选择其中的一组数据,在额定水头下,根据相关参数,得到水轮机调节系统的传递函数,运用计算机和MATLAB软件,进行控制系统仿真,仿真框图如图2所示。
由模糊PID控制器结构图可知,PID参数校正部分实质是一个模糊控制器。水轮发电机组调节的目的是机组频率按照预定的某一期望值动作,所以选择模糊PID控制器的输入量为期望值与实际输出的偏差e和偏差变化率ec,输出量为Kp,Ki和Kd的二输入三输出的模糊控制器。本设计采用Mamdani型模糊逻辑系统,该方法源于Zadeh关于模糊算法在复杂系统和决策中应用的思想,具有理论直观、适合人类认知信息的输入方法。
设定Kp的论域为[-6,6],Ki的论域为[-0.3,0.3],Kd的论域为[-3,3]。隶属度函数如图3所示。
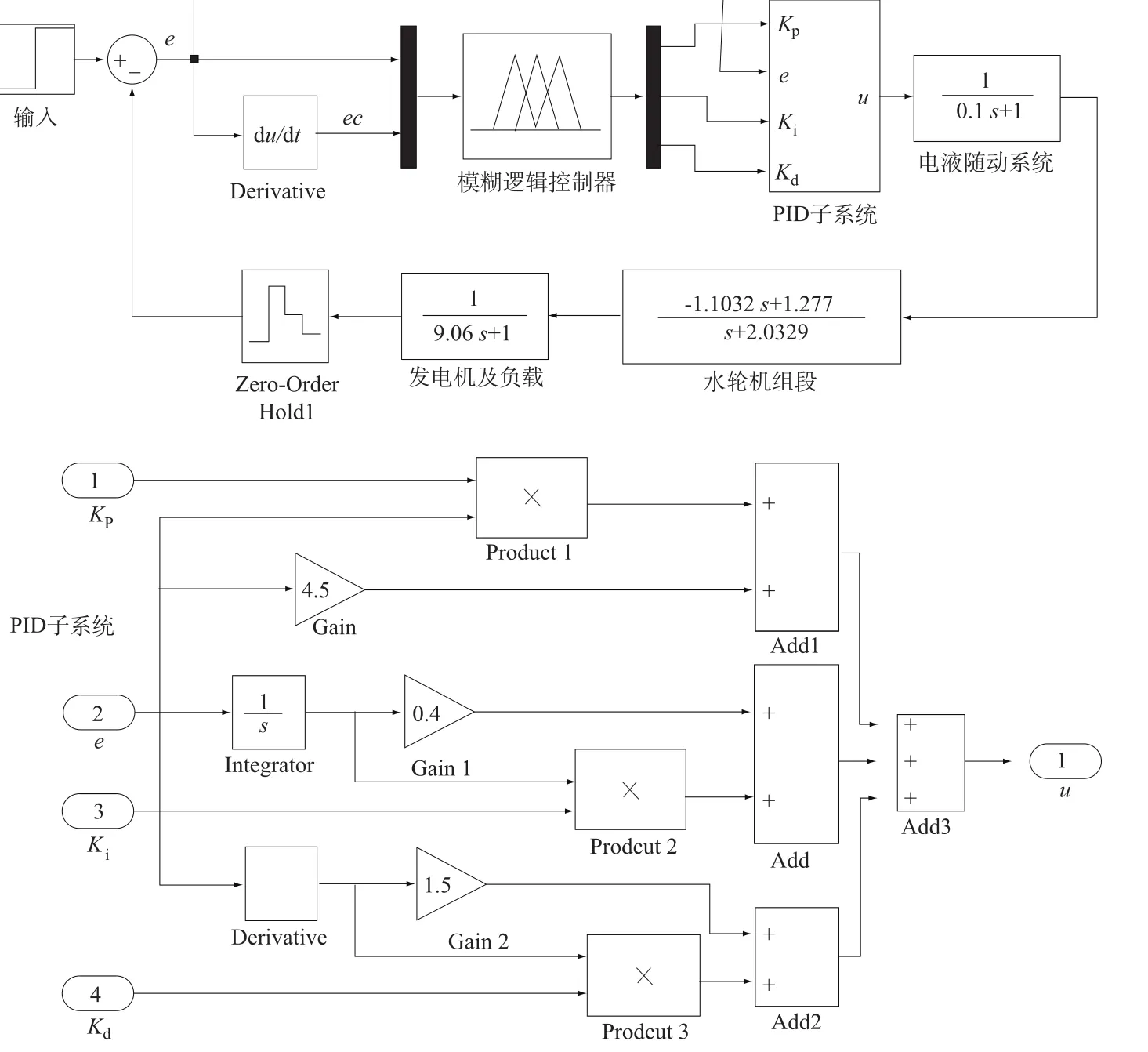
图2 仿真框图Fig.2 Simulation flow chart

图3 输出量Kp,Ki,Kd的隶属函数Fig.3 Membership function of outpuk variables Kp,Ki,Kd
根据上述设定,对e,ec分别选取3种不同隶属度范围的输入进行仿真,输入的隶属度函数和控制过程曲线如图4所示。

图4 不同隶属选取及过程控制曲线Fig.4 Differentmemberships’selection and duration control curves
模糊PID控制系统主要是确定比例、积分、微分系数来获取良好的控制品质,在不同的控制过程和系统参数变化情况下,比例、积分、微分系数应有不同选取。从以上对e,ec的选取范围看,控制品质是有区别的,因此选取合适范围和隶属度,对系统的控制品质影响很大。如图4所示,当e,ec隶属度范围为[-15,15]时系统会出现比较明显的超调量,随着选取隶属度范围的逐渐变大,系统响应逐渐加快。当隶属度范围为[-30,30]时,系统能够在30 s左右进入稳定状态,上升阶段的超调量也明显减小。当隶属度范围在[-60,60]时,过程控制曲线在上升阶段结束时出现的超调量较小,稳定性提高,被控对象运行在较佳工作状态。
这是因为隶属度在从[-15,15]到[-60,60]的变化过程中,最大误差50分别属于不同的模糊集,随着模糊集的变化,加大了Kp,减小了Ki,提高响应速度,兼顾稳定性与控制精度避免影响稳定性;加大了Kd的微分作用,抑制超调。但是这不是说隶属度的范围越大越好,目前尚无准确计算最适隶属度的方法和工具,隶属度范围的最佳选取方法还在进一步研究中。
在选择e,ec隶属度为[-60,60]后,系统控制品质处于较佳状况,为了解被控对象运行工况变化后情况,根据文献[6]选择另外2组数据进行仿真计算,如图5所示,得到的过程控制曲线也表现出控制具有较好的动、静态品质。因此选取合适的隶属度可以使模糊PID控制系统在水轮机运行工况发生变化时,具有较好的控制品质。

图5 不同开度下过程控制曲线Fig.5 Process control curves under different openings
隶属度函数是模糊控制的应用基础,正确构造隶属度函数是能否用好模糊控制的关键之一。隶属度函数的确定过程,本质上说应该是客观的,但每个人对于同一个模糊概念的认识理解又有差异,因此,隶属度函数的确定又带有主观性。隶属度函数的选取方法一般有模糊统计法、例证法、专家经验法、遗传算法选取法、二元对比排序法和熵极大化方法。这些方法大部分是建立的在实际经验的基础上,加上必要的数学处理而得到的,经常是初步确定粗略的隶属函数,然后再通过“学习”和实践检验逐步修改和完善,而实际效果正是检验和调整隶属函数的依据。
5 结 语
将经典PID控制和模糊控制结合起来,设计了PID参数模糊整定控制系统,由于系统可以自动根据实际情况进行在线调整,因而具有良好的性能。通过对水轮机调节系统的三种不同隶属度仿真试验,表明选择合适的隶属度对模糊控制系统的品质起着重要的作用,合适的隶属度无论是在系统响应速度,还是稳定性上都有明显提高。
[1] 陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002.
[2] 孙庚山,兰西柱.工程模糊控制[M].北京:机械工业出版社,1995.
[3] 陶永华,尹怡欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998.
[4] KUNG Ying-shieh,LIAW Chang-ming.A Fuzzy Controller Improving a Linear Model Following Controller for Motor Drives[J].IEEE Trans.on Fuzzy Systems,1994,2(3):194-202.
[5] Chuen Chzen Lee.Fuzzy Logical in Control System:Fuzzy Logical Controller PartⅠ[J].IEEE Trans.on System,Man,Cybernetics,1990,20(2):404-410.
[6] 叶鲁卿.水力发电过程控制理论、应用及发展[M].武汉:华中科技大学出版社,2002.
(编辑:周晓雁)
国家科技支撑计划课题“坡地高效生态农业的基础设施配套技术研究”在长江科学院启动
2009年7月4日,“十一五”国家科技支撑计划重点项目“长江上游坡耕地整治和高效生态农业关键技术试验示范”第二课题“坡地高效生态农业的基础设施配套技术研究”启动会在课题负责单位长江科学院召开。会议由课题负责人长江科学院水土保持所所长张平仓教授主持,长江科学院、中国科学院水利部成都山地灾害与环境研究所、西南大学、华中农业大学、四川省农业科学研究院土壤肥料研究所等课题参加单位的各专题负责同志及骨干等共计20余人参加了会议。长江科学院副总工程师徐平到会指导,并对课题启动会的召开表示祝贺。
“坡地高效生态农业的基础设施配套技术研究”是由中国科学院牵头,联合水利部共同实施的“十一五”国家科技支撑计划重点项目“长江上游坡耕地整治与高效生态农业关键技术试验示范”三大关键共性技术课题之一。针对长江上游坡耕地量大面广,土地生产力和劳动生产率不高,抵御季节性旱涝灾害能力差,严重制约区域特别是山区农村的社会经济可持续发展等问题,以及现有国家土地整治和生态建设(“长治”、“退耕还林”和“中低产田改造”等)工程存在的主要技术瓶颈问题,课题集成研发造价低、效益高、适应山区农业机械化和易于推广的“坡面径流调控的工程配套技术”和“坡地农业机械化的道路配套技术”,构建“坡地高效生态农业的基础设施配套”关键支撑技术体系,与项目第一课题“调水保土坡耕地微地形改造”以及第三课题“坡地作物高产高效生产”关键支撑技术体系一道,为建设“长江上游坡耕地整治与高效生态农业示范区”、构建“农业科技示范基地与人才培养基地”提供共性关键支撑技术。课题共分为6个专题研究,国拨经费403万元。
会上,各专题承担单位分别就课题立项以来开展的工作、已经取得的成果及下一步工作计划与安排进行了相互交流和讨论,在研究区域的确定、资料的共享、今年年终考核成果等方面达成了一致意见。
《摘自(长江科学院网)》
Influence of Membership Determ ination on Stability of Fuzzy Control System
LIBin
(Department of Electric Power,North China Institute ofWater Conservancy and Hydroelectric Power,Zhengzhou 450011,China)
The traditional PID control is hard to use in the great nonlinearity,lag and parameter variety of a hydro-turbine generating system.The fuzzy-control has the advantages of better dynamic response characteristic,better adaptability,faster rise time and better robust characteristic,but it causes error easily because of the limitation by fussy-control grade.This paper,through a combination of fuzzy control and PID algorithm advantages,proposes a design of fuzzy PID controller tomake use of MATLAB software for hydro-turbine generating system simulation.The results show that,a suitablemembership to the fuzzy PID control system,whether to run at the response speed of the system or the stability,has a distinct improvement.
hydro-turbine regulating system;membership determination;fuzzy-control
TP273.4
A
1001-5485(2009)08-0088-04
2009-02-18
李 斌(1984-),男,天津市人,硕士,主要从事水力机组控制研究,(电话)15838125515(电子信箱)roger8479@vip.qq.com。
文章编号:1001-5485(2009)08-0092-03
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
大电机技术(2021年3期)2021-07-16
装备制造技术(2020年4期)2020-12-25
农经(2017年6期)2017-07-05
新农业(2016年16期)2016-08-16
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
