单片机在铁路桥梁挠度监测中的应用
2010-08-07 08:41华勇,卢海,张涛
铁路计算机应用 2010年2期
华 勇,卢 海,张 涛
(成都铁路局贵阳电务段,贵阳550005)
桥梁的挠度与桥梁的承载能力及抵御地震等动荷载的能力有密切的关系,因此桥梁动静挠度测量方法的研究和仪器设备的开发研制,对于桥梁承载能力的检测和桥梁的防震减灾有着重要的意义 。
1 目的及创新
成都铁路局管内多为山区铁路,桥梁众多,准确掌握承重桁架的变形情况,对桥梁的运行状况进行健康监测,不但可以有效预防突发性灾难,减少损失确保基础设施与使用者的安全,还可为优化设计提供依据,更可能据此制订维修计划。开发使用ARM处理器和线阵CCD很好地解决了这一问题。
线阵CCD是一种光电耦合元件,它在3 cm左右的长度上集成数千个光敏单元。根据其精密特性,设计一套光电液压装置,可实现桁架梁的远程位移检测。高精度的光电装置选择LPC2200作为核心单片机与之配套,用以完成整个系统的控制工作。
2 系统设计
2.1 系统整体结构
该系统整体为3层结构,如图1。

监控中心使用LABVIEW开发出可视化平台,完成人机交互。工控机和R3000系统之间通过公用以太网连接,而R3000系统和下位机则通过RS-485总线连接,形成分布较广的监控网络,有利于同时对大桥的多个点实时监测。
监控中心通过以太网向R3000发送控制命令并接收下位机的数据,R3000收到监控中心的命令后,对下位机发送相应的操作指令,从而控制多个下位机进行数据采集。
每个下位机系统都有一个独立的地址(相对于同一条RS-485总线而言),R3000对下位机发送指令时,总线上的每一个下位机都可以收到。下位机通过识别指令中的地址信息来确认指令是否有效,从而做相应的工作,并返回工作结果。系统的总线控制权完全由上位机掌握,实现了一主多从的通信方式,免去了总线仲裁、冲突检测等繁琐过程,提高了总线的利用率。
2.2 下位机系统结构
整个下位机包括CCD光学设备、机械传动装置、电子设备。若干个下位机通过485总线串接在一起组成一组,通过中间上位机的控制,完成一个测试点的挠度监测工作。
由下位机电子设备产生CCD的驱动脉冲,根据液面的变化,CCD输出相应的信号,经过单片机处理后转换成数据发给中间上位机。上位机使用R3000实现数据包的收发。
下位机采用停等协议实现总线仲裁。整个系统一经上电,各个下位机开始CCD数据采集,并一直处于总线侦听状态,根据总线上命令进行相应的操作。
3 系统功能综述
3.1 系统设计原理
在CCD驱动系统的实现中,使用了单片机驱动法。因CCD高精度感光元件,具有高灵敏性,所以驱动电路设计时需要考虑许多方面。包括四路驱动脉冲的产生、整形、调理以及门电路的延迟等因素。
光学系统设计,使用了CCD、镜头、光源3部分中心线定位法。为了使系统的精度达到最优,使用了物距象距移动法最终确定光学系统的定位。
控制系统设计中,下位机系统选择LPC2200芯片,免去了微处理器与A/D转换器之间的接口电路和时序控制电路,硬件电路设计更加简洁,芯片的外围元件非常少,硬件的可靠性得到了提高。外围电路只需一套单片机最小子系统即可。
机械系统设计,使用桥梁带动水箱,水箱带动液面移动的方法反映挠度变化。由于系统灵敏度高,需要考虑很多因素,例如周围环境温度的变化、传动系统的响应灵敏度、不同的行车周期,以及桥梁的共振等。通过对数种不同的材料进行上百次的测试,分析大量的数据,最终确定了一种最合理的方法。
使用单片机开发CCD时序驱动电路的设计方法灵活,设计思想、时序清晰,保证了其正确性。另外,使用这种方法还减小了电路板的面积,提高了系统的稳定性,适用于微型化仪器中。
3.2 机械系统设计
利用连通器两边液面等高的原理,通过液面的变化来反映桥梁的形变是一种可靠的方法。由于液体在管子里以波的速度传导,所以可以实时显示桥梁的振动情况。
在桥梁的顶端放置一水箱,在100 m远处放置一套CCD光学系统。在光学系统箱内部设计一段细玻璃管,通过100 m长的粗管与水箱相连。如果桥梁发生形变产生位移,则细玻璃管内对应的液面也因此上下移动。通过液面的移动来反映桥梁的挠度。
系统所有管子里都是非透明的液体。在玻璃管背后用一段发光二极管照亮整段玻璃管。有液体的部分不透光,而没有液体的部分则透光。这些光透过光学镜头打在CCD靶面上,从而使CCD输出相应的电荷信号。
由于不同的传导管的构造及内壁的阻力不同,以及液体在共振情况下发生抖动,还另需考虑各种环境条件对实际测量精度的影响。
3.3 光学装置设计
基于远程位移的特点,在对光学系统优化设计时,应主要考虑整个光路系统和CCD器件的共轴(即准直)问题。精确地测量CCD、镜头及光源轴向确定光学系统尺寸,使光学系统轴向一致,并垂直于CCD光敏面,使待测目标的位移方向与线阵CCD光敏元的排列方向均一致,从而组成一个共轴系统,也解决了检测系统的光路准直问题。
CCD有效象元长度为30.2 mm,对应的视场为156 mm,放大倍率约为1∶5。在整个检测系统测量精度高低的确定上,光学系统放大倍率与线阵CCD光敏单元尺寸共同决定了测量精度的高低。为了提高精度,可提高光学系统的放大倍率β。在物距一定时,可以通过提高物镜的焦距来提高测量精度,可以在电路处理部分使用更高频率的时钟脉冲采样,可以将CCD测量的精度值提高近一个数量级。因此,基于CCD的远程位移自动在线检测系统并没有只在光学系统设计上进行优化,还在硬件上采用具有流水线结构的高速LPC2200芯片,增加了数据采集的速度,实现了实时高频率数据采集。
3.4 网络系统设计
这套系统需要对多达22个点进行挠度检测,采用网络控制技术,可将众多设备有机地连成一体,以保证整个系统安全可靠地运行。用RS-485总线方式组成整个传感器网络,可以实现系统的多机通讯。
3.5 软件设计
为了实时准确地实现串行通讯,系统采用了一套完整的通信协议。
开始每个下位机处于总线侦听状态。当串口收到指令时,将接收缓冲区有效标志置位,主循环得知缓冲区内有指令到来,便对缓冲区数据进行CRC校验,由于CRC校验的检错率近乎100%,所以只要CRC校验通过,便认为收到的数据是正确的。RS-485总线的结构特殊,对于一条指令,总线上所有的下位机都能够收到,即使这条指令不是传达给该下位机的,这就需要每个下位机都有一个唯一地址,在收到正确数据后还要对其中地址部分进行核对,如果地址正确,则取出指令部分,进行分析和执行,否则丢弃该数据。最后,指令执行完毕后,下位机将指令执行的结果返回给上位机。
软件总体流程如图2。
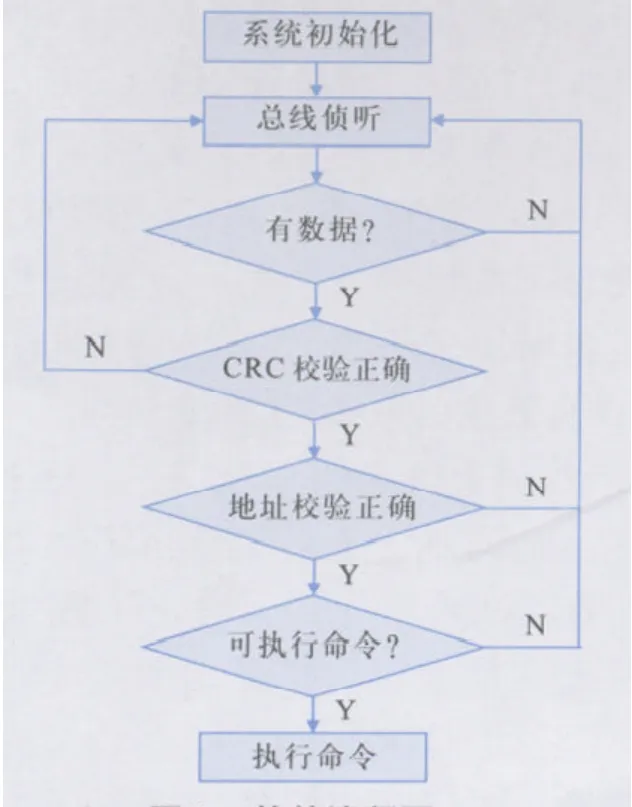
图2 软件流程图
4 测试结果
由于列车长度不同,在铁路桥梁上运行的周期也不同,在测试平台上模拟挠度幅值为9.1 cm,根据不同运行周期测试统计,得出数据如表1。

表1 周期测试统计表
系统测试的精度为幅度/脉冲数目,通过表1可以计算出测量精度在0.1 mm以内,达到实际需求。图3为模拟列车运行时LABVIEW采集到的挠度变化曲线。
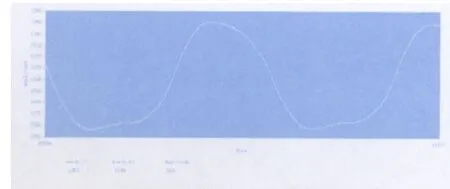
图3 挠度变化曲线
由图3可以看出,在运行周期为10 s时,共有104个CCD象元发生变化,由此得到系统的精度为9.1/104mm。
5 结束语
本文所描述的光电液位式挠度监测系统成本相对较低,具有能够对桥梁上多个点进行远距离实时监测,采样速率快,精度高等特点。通过在山西新原高速小沟特大桥长期测试,其性能稳定可靠,是铁路桥梁挠度监测的新方法。
[1] 王庆有,孙学珠. CCD应用技术[M] . 天津:天津大学出版社,1987.
[2] 周立功. 深入浅出ARM7-LPC213x/214x(上)[M] . 北京:北京航空航天大学出版社,2004.
[3] Jean.Labrosse. 嵌入式实时操作系统μC/0S-II[M] . 2版. 北京:北京航空航天大学出版社,2003.
[4] 曾峰. 印刷电路板设计与制作[M] . 北京:电子工业出版社,2002.
[5] 冯耀辉. 印刷电路板设计.PowerPCB 5.0入门与提高[M] . 北京:人民邮电出版社,2003.
[6] 徐睿. 基于ARM的嵌入式系统开发与应用[M] . 北京:人民邮电出版社,2004.
猜你喜欢
一重技术(2021年5期)2022-01-18
首都师范大学学报(自然科学版)(2020年6期)2021-01-27
科学技术与工程(2020年36期)2020-02-04
阅读(科学探秘)(2019年4期)2019-06-19
科技与创新(2018年1期)2018-12-23
自动化博览(2017年2期)2017-06-05
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
空间控制技术与应用(2015年2期)2015-06-05