三维扫描图像光带中心线提取的FPGA实现
2010-08-28 02:30姚文达田庆国陈兴梧
天津工业大学学报 2010年3期
姚文达,田庆国,陈兴梧
(天津大学 精密仪器与光电子工程学院,天津 300072)
三维扫描图像光带中心线提取的FPGA实现
姚文达,田庆国,陈兴梧
(天津大学 精密仪器与光电子工程学院,天津 300072)
结合三维扫描系统,设计了基于FPGA的光带中心线实时处理系统,采用列扫描梯度质心法,以硬件的形式实现了对光带中心线的实时、快速、准确提取,并将处理系统应用于三维扫描领域进行了实验,所得结果真实、有效,满足对30帧/s的图像数据进行实时提取的要求.
FPGA;中心线提取;三维扫描
随着科学技术的发展和工艺水平的提高,可编程逻辑器件的片内资源不断扩充,使其在图像实时处理领域中的应用有了广阔的空间.FPGA应用于实时信号处理和图像处理,或作为单独的处理器,或与其他CPU联合使用,都取得了显著的成果.胡亮等[1]为了解决钢板表面缺陷视觉检测系统中图像处理的瓶颈问题,采用基于FPGA的嵌入式处理系统完成大数据量、实时、在线的处理任务,从而满足高速、宽幅、高分辨率的检测要求.江洁等[2]提出了一种基于Steger算法的串并结合的处理结构,使得光条纹中心提取速度得到了提升,并进一步给出了基于FPGA的实现方法,提取精度达到了亚像素级.鲍建周等[3]以图像的重心计算和Hough变换为例,设计了基于FPGA的算法,并采用VHDL语言,将算法实际应用于磨损钢轨的断面轮廓检测.段雷等[4]将FPGA作为整个系统的时序控制中心和数据交换桥梁,而且能够实现对底层的信号快速预处理.本文结合三维扫描系统的特点,将以FPGA为核心的实时处理系统应用于三维扫描系统中,将图像的采集过程和处理过程结合起来,并在FPGA芯片上实现了基于梯度质心算法的三维扫描图像光带中心线的快速实时提取.
1 三维扫描图像光带中心线提取原理
实际采集得到光带位图如图1所示.在1幅图像中,设光带中心线坐标为(Xz,Yz),以左上角第1个像素为坐标(0,0),以右下角最后1个像素为坐标(719,479),图中每个像素点(Xi,Yj)的亮度值为Bij.图1中,对应每一个Xz=Xi,在每一列中对亮度值Bij进行检测,分别得到光带的上下边界,并在上下边界中间的区域应用质心法以Bij为权值,加权平均后得到Yz.
本设计采用逐列扫描、遍历图像中每一列的方法来进行光带中心线坐标的提取,得到光带中心线的坐标(Xz,Yz),并将所得坐标上传到计算机中.

图1 三维扫描仪采集得到的图像Fig.1 Images obtained by 3D scanner
2 系统硬件设计
图2为光带中心线实时提取系统硬件设计框图.

图2 系统硬件框图Fig.2 System hardware block diagram
整个系统主要由4个部分组成:
(1)采集部分,主要由视频解码装置来担任,将CCD所输出的模拟信号转化为数字信号,并将全电视信号中的同步信号解码出来,供其他模块使用.
(2)存储部分,完成图像数据的顺序存储,为后续的质心法求光带中心线坐标提供方便,本文中存储部分使用SRAM静态存储器来完成设计功能.
(3)控制和处理部分完全,在FPGA内部设计完成,该部分分成了若干模块,这些模块相互配合共同实现控制和处理任务.主要包括配置视频解码器、完成对图像的列扫描、设定阈值、提取光带中心线坐标和控制数据上传.
(4)数据上传部分,以USB2.0作为计算机与系统的通信接口完成数据的实时上传.
系统开始工作后,CCD相机所发出的模拟信号将直接送入视频采集部分中的视频解码装置,视频解码器将完成由模拟信号到数字信号的转换,解出相应的同步信息,作为其他部分的通信和控制信号,同时被测物体图像的亮度信息将在数据线上输出,并分奇、偶两场完成一帧图像的传送;控制和处理部分将对视频解码芯片所输出的同步信号进行检测,当有效数据到来时,FPGA将选通SRAMA,按照图3所示的交叉存储方式,完成第1帧图像的顺序存储,当第2帧图像到来后,选通SRAMB,以同样的方式完成第2帧图像的顺序存储;同时在第2帧图像存储期间,FPGA将SRAMA中的数据取出,经内部的处理模块处理后得到图像光带中心线坐标,最后由上传模块将得到的数据上传至计算机,并等待下一帧图像有效数据的到来,按照相同的步骤进行处理和上传.

图3 交叉存储工作方式Fig.3 Way of cross-store
3 梯度质心算法的Verilog实现
梯度质心算法流程图如图4所示.

图4 梯度质心算法流程图Fig.4 Centroid olgorithm map
由图4可见,FPGA在时钟有效时,以列扫描的方式读出一帧数据,并将读出的亮度值与所设定的阈值进行比较;当数据亮度小于阈值时,判断数据有效位DIV_BIT,若DIV_BIT=0,则读取下一个数据,直到亮度大于阈值的像素到来,FPGA会将DIV_BIT位置1,并将亮度值B_DATA和相应的图像纵坐标Y送入运算模块,如图5所示.

图5 运算模块处理框图Fig.5 Computing processing block diagram
为了满足所提取光带中心线纵坐标的精度要求,运算模块将亮度值与图像纵坐标相乘并累加后,扩大1 000倍,送到除法器被除数的位置,同时将亮度数值累加后,送到除法器除数的位置,等待除法操作开始指令.在下一个小于阈值的像素到来之后,FPGA控制运算模块完成一次除法操作,得到图像中与Xz相对应的纵坐标Yz,并将FIFO写有效位FIFOWE置1,处理结果会在下一个时钟有效沿存入FIFO中等待上传,同时数据有效位DIV_BIT清0,等待下一串大于阈值的码流到来.当完成一帧数据的处理后,FPGA将以同样方式在RAMB中取出下一帧数据并处理,同时将新数据存入SRAMA中.如此往复循环,通过乒乓机制,完成整个实时处理的工作过程,提取出光带中心线坐标.
4 实验结果
本文选用Altera公司生产的CycloneⅡ系列中的EP2C50F672C8芯片完成设计,实现三维扫描图像光带中心线提取的梯度质心算法.结合三维扫描仪,对人体脚部模型进行了实验,选取扫描过程中的不同位置(脚侧位置、脚面位置和脚尖位置),并将采集系统的处理结果标记在原始扫描图像上进行比较,处理结果如图6所示.
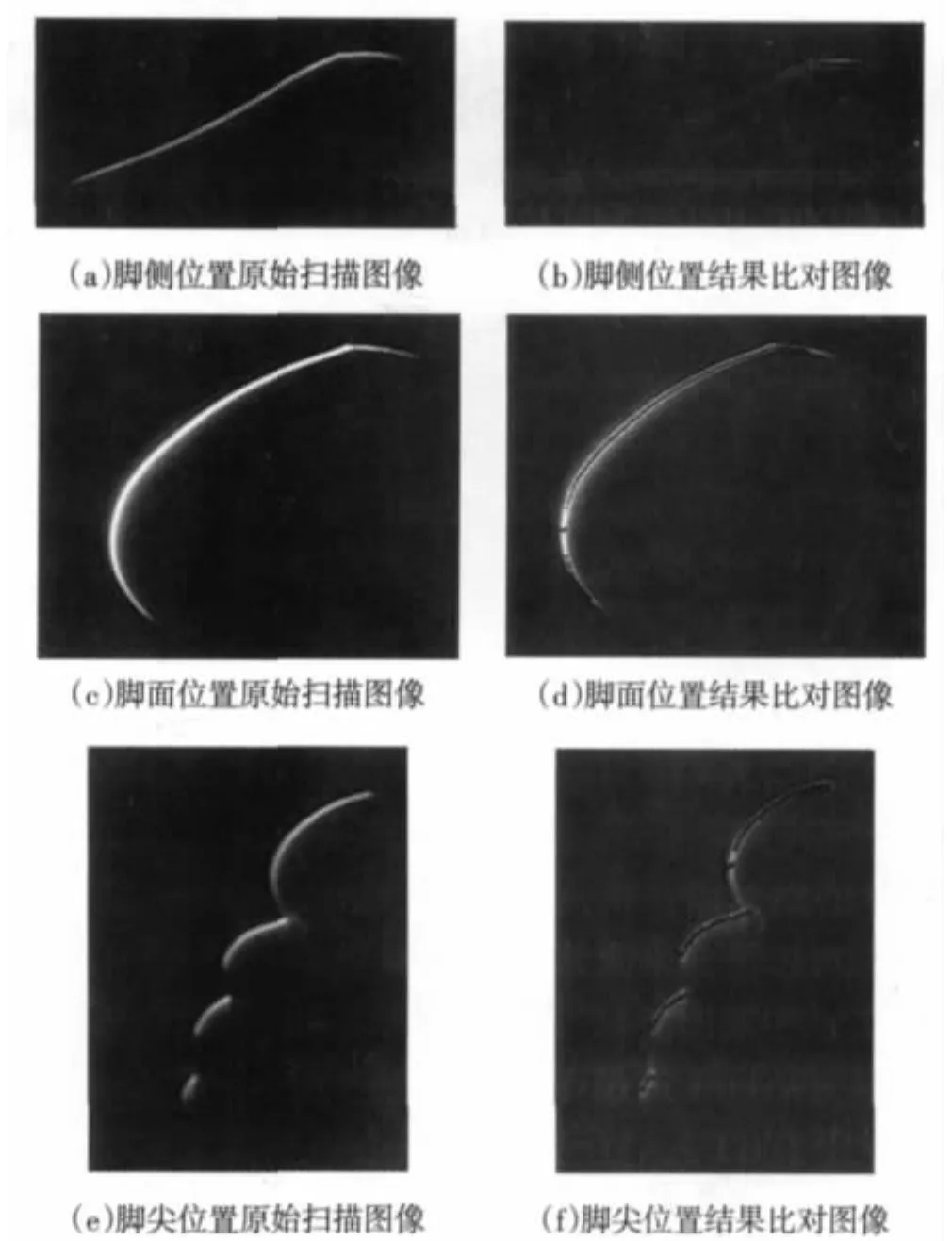
图6 处理结果图Fig.6 Processing results
由图6可知,无论是在图像细节较少的脚侧位置,还是在图像细节较突出的脚尖位置和有可能形成环状光带的脚面位置,本文所设计的实时处理系统均能将这些位置的图像信息有效地提取出来,并且实时处理系统所提取的光带中心线坐标与原始图像光带相吻合.
进一步将所设计的系统应用于三维扫描系统,如图7所示.对图7(a)所示的人体脚步模型进行了扫描实验,经过本文所设计的实时处理系统后,重建图像如图7(b)所示.

图7 人体脚部模型和三维重建结果图Fig.7 Human foot model and three-dimensional reconstvuction results chart
对比图7中3个角度的人体脚部模型和重建图像可知,本文系统可以有效重建出物体的表面轮廓信息,并且很好地还原出了物体表面的细节信息,重建三维图像轮廓清晰、表面平滑,说明该系统真实、有效.
5 结束语
本文利用FPGA硬件电路的并行体系结构,与三维扫描系统相结合,将以FPGA为核心的实时处理系统应用于三维扫描系统当中,以硬件形式实现了三维扫描图像光带中心线提取的梯度质心算法,解决了原有扫描系统传输效率低、系统集成度不高等问题,经过实际的扫描比对实验和重建实验,证明本文所设计的系统工作正常、结果有效,具有一定的应用价值.
[1]胡 亮,段发阶,丁克勤,等.基于FPGA图像处理技术在钢板表面缺陷检测系统中的应用[J].传感技术学报,2006,19(3):694-701.
[2]江 洁,邓珏琼,张广军.光条纹中心的实时快速提取[J].光学技术,2008,34(2):170-174.
[3]鲍建周,赵 瑞,王 芳,等.用VHDL语言实现高速视频图像处理[J].中国现代教育装备,2008(12):42-44.
[4]段 雷,李 梅,王彩霞.基于DSP和FPGA的实时图像处理平台的设计[J].实验科学与技术,2008,6(5):52-54.
Optical band centerline extraction in 3D scanner image based on FPGA
YAO Wen-da,TIAN Qing-guo,CHEN Xing-wu
(School of Precision Instrument and Opto-Electronics Engineering,Tianjin University,Tianjin 300072,China)
Combining with 3D scanner,the optical band centerline extraction system based on FPGA is designed by using gradient centroid algorithm,the real-time fast and accurate centerline extraction is achieved in hardware. The application of system in 3D scanner proves the correctness of the system.The centerline extraction system can meet the needs of real-time extraction in 30 Frames per second.
FPGA;centerline extraction;3D scanner
book=3,ebook=114
TP391.41
A
1671-024X(2010)03-0050-03
2009-12-24 基金项目:国家自然科学基金资助项目(60277009);天津市科技攻关培育资助项目(05YFGPX05000)
姚文达(1984—),男,硕士.
田庆国(1973—),男,博士,讲师.E-mail:tianqingguo@tju.edu.cn
猜你喜欢
优雅(2022年12期)2022-12-28
汽车实用技术(2022年14期)2022-07-30
水电站机电技术(2022年4期)2022-04-18
北京航空航天大学学报(2021年4期)2021-11-24
日用电器(2020年9期)2020-12-09
扬子江(2019年1期)2019-03-08
计算机技术与发展(2018年9期)2018-09-21
中外医疗(2015年5期)2016-01-04
应用科技(2015年5期)2015-12-09
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01