
基于GPRS的电动汽车道路行驶工况自学习
2010-09-25 07:38庄继晖
天津大学学报(自然科学与工程技术版) 2010年4期
庄继晖,谢 辉,严 英
(天津大学内燃机燃烧学国家重点实验室,天津 300072)
汽车行驶工况是针对某一类型的车辆(如轿车、轻型车、重型车等)指定用来代表在特定环境(如城区、郊区)的车辆行驶车速-时间历程[1].受到道路特征、地理特征以及交通流量等因素的影响,使得不同地区和典型城市的行驶工况具有不同的特点.通过获取和分析汽车的行驶工况能够为考察车辆在某一地区的排放水平和能量消耗分布提供数据依据;同时对车辆动力系统匹配以及控制策略的优化具有重要的指导作用.
电动汽车作为新能源动力车辆,具有高效、节能、零排放等特点,为环保和节能提供了全新的途径.在研制符合环保法规要求的电动汽车的过程中,对道路行驶工况的开发研究是一个重要环节.目前我国轻型车采用的测试循环是欧洲的行驶工况 ECE15+EUDC[2],但是我国各城市交通状况以及道路状况等与欧洲国家存在着不同的差异,因此研究符合我国交通特征的车辆实际行驶工况具有重要的意义.一般来说,车辆道路行驶工况的开发包括试验规划、数据采集、数据分析和工况验证4个过程[3-4].在数据采集过程中,通常采用车载数据记录仪或者 GPS导航仪等设备来获得车速等数据.车载数据记录仪能够获得精度和准确度较高的数据,但是受存储空间的限制,不适合车辆数据的长时间连续记录;而 GPS导航仪由于 GPS信号漂移等原因会给车速的测量带来一定的误差.为此,笔者提出了一种基于 GPRS的远程采集道路行驶工况数据的方法;并利用自组织映射(self-organizing map,SOM)网络对车辆的运动学片段进行聚类,获得与实际运行中交通状况相对应的类集合;最后运用主要特征参数构造出适用的、时间序列较短的行驶工况,从而实现对电动汽车道路行驶工况的自学习.
1 基于GPRS的远程数据采集
行驶工况自学习流程如图1所示.

图1 行驶工况自学习流程Fig.1 Process of self-learning of driving cycle
通用分组无线业务GPRS采用分组交换技术,特别适用于间断的、突发性的和频繁的、点多分散、中小流量的数据传输[5],因此 GPRS能够很好地满足电动汽车行驶工况数据远程采集的需要.整个系统结构如图2所示.
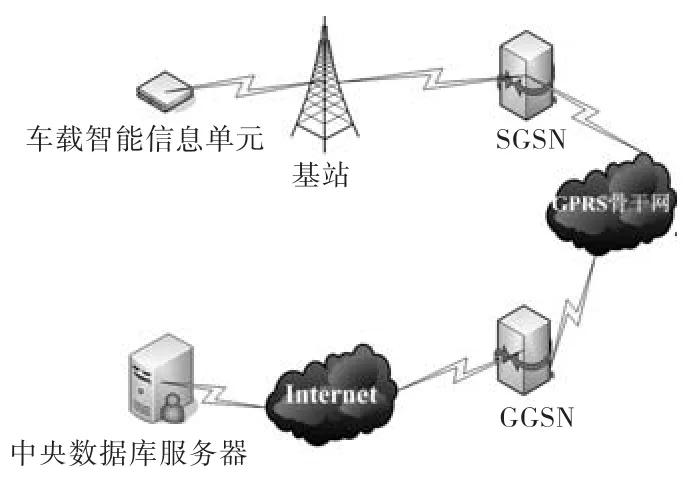
图2 远程数据采集系统Fig.2 Structure of remote data collection system
远程数据采集原理如下:首先车载数据采集终端的CAN模块通过CAN总线与电动汽车主控制器进行数据交换,获得车速和车辆运行状态信息,并将获得的数据按照通信协议进行数据打包成PDU分组数据单元;接着 PDU被传送到 GSM 网络中车载数据采集终端所处的服务GSN(serving GSN,SGSN)[6-7];最后 SGSN把数据传送到网关 GSN(gateway GSN,GGSN),GGSN 将收到的数据进行解封装处理,转换为可在 Internet中传送的格式,最终采集数据被连接到 Internet上的中央数据库服务器接收,完成整个基于 GPRS远程数据采集的过程.远程采集的数据存储在中央数据库服务器中,必须对原始数据进行处理和解析,才能构建出车辆的实际行驶工况.
2 SOM在行驶工况自学习中的应用
2.1 SOM神经网络
SOM网络是由Kohonen于1981年提出的,其基本结构如图3所示,网络由输入层(神经元数为N)和竞争层(神经元数为M)构成,输入层和输出层之间的神经元形成全连接.SOM 网络可以将任意维的输入模式在输出层上映射为一维、二维或更高维的离散图形,并且保持网络的拓扑结构不变[8].SOM 的聚类功能主要是基于以下2个规则[9-10]实现的.
(1)对于提供给网络的任意一个输入向量 ξ,确定响应的输出层获胜神经元S,其中

(2)确定获胜神经元 S的一个领域范围 Ns,并调整 Ns范 围 内 神 经 元 的 权 向 量 Wc= Wc+ ε( ξ −Wc) ,∀c∈ NS,这个调整过程将使 Ns内神经元的权向量朝着输入向量 ξ的方向靠近.学习率ε和领域 Ns随着学习时间不断缩小,所有的权向量会在输出向量空间中相互分离开来,各自代表输出空间的一类模式,即SOM的聚类功能.

图3 SOM网络的结构Fig.3 Structure of SOM network
2.2 基于SOM网络的行驶工况聚类分析
研究表明,车辆在不同路段、不同时间的道路状况会有很大的差异,在构建行驶工况中将运动学片段总体样本分成2类比较合理[11].为了反映车辆的运动学水平,本文定义了 15个特征值参数,如表 1所示,通过这些特征值可以了解其对应的交通特性.首先对原始数据进行运动学片段的分割处理;然后应用SOM 网络的聚类分析技术,把电动汽车的运动学片段分成 2类,形成实际行驶中对应的畅通流、拥挤流(包括堵塞流)行驶特征.
以训练库中的80个样本作为训练样本,20个样本作为测试样本,使用 Matlab的神经网络工具箱进行SOM网络的构建.通过SOM网络,样本被分为2类,形成拥挤流(包括堵塞流)、畅通流行驶特征的片段数据库——库1和库2.库1的特征参数显著反映了拥挤流(包括堵塞流)情况下运动学片段的特点.相比库 1而言,库 2的平均速度、平均运行速度以及平均运行距离均明显增大,而平均加、减加速度和怠速时间明显减少,这说明经过 SOM 聚类分析后的运动学片段是有效的,与电动汽车实际行驶情况具有很好的对应关系.

表1 运动学特征值表Tab.1 Characteristics of kinematics
2.3 行驶工况的在线构建
经过 SOM 的聚类分析后,得到了 3个片段库,分别为原始数据片段库(综合行驶工况片段库)、拥挤道路行驶工况片段库和畅通行驶工况片段库.在这 3个片段库的基础上构建反映拥挤道路、畅通道路和综合道路行驶特征的 3种行驶工况.行驶工况的构建过程如下:首先,从对应的短行程样本库中随机挑选n个短行程,组成一个约900~1 200 s[12]的工况,并计算其主要特征值;其次,进行工况的有效性判断,如果计算出的特征值与样本中相应特征值的误差不超过10%,则认为此工况满足有效性判定条件,能够成为反映对应道路行驶特征的行驶工况;否则,再次随机挑选 n个短行程组成新的工况,计算其特征值误差,直到满足误差允许范围内的工况出现为止.
根据上述过程构建出的 3种行驶工况见图 4~图6.图4为拥挤道路行驶工况,工况时长1,222,s,运行距离2.66,km,平均速度7.8,km/h.图5为畅通道路行驶工况,工况时长 1,083,s,运行距离 8.52,km,平均速度 28.3,km/h.图 6为综合行驶工况,工况时长1,040,s,运行距离6.25,km,平均速度21.6,km/h.

图4 拥挤道路行驶工况Fig.4 Driving cycle of congested condition

图5 畅通道路行驶工况Fig.5 Driving cycle of straightway condition
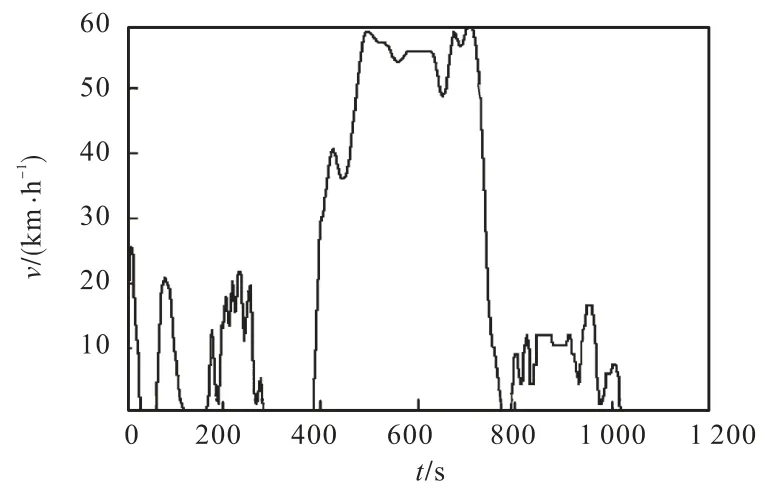
图6 综合道路行驶工况Fig.6 Driving cycle of general condition
为了验证构建出来的工况的有效性,对构建工况和实际工况进行了相对误差分析.获得如下结果,与表1相对应的各参数的平均相对误差分别为 2.97%、5.18%、6.26%、7.37%、6.11%、4.33%、8.01%、7.55%、4.42%、7.23%、8.26%、6.35%、5.77%、7.28%、7.57%.分析结果表明构建出的工况与实际工况的特征参数的相对误差在 10%以内,说明构建出的行驶工况能够比较真实地反映该地区车辆运行的实际状况.
本文构建的汽车行驶工况与欧洲工况相比有自己的特点,见表 2.具体表现为综合工况的平均速度比欧洲工况的略高 7.28%;综合工况下的平均加速度相对较低,,比欧洲工况的低19.1%, 其平均减速度为-0.58 m/s2,也比欧洲工况的低了19.4%,这反映出欧洲国家的总体道路设施水平要高于天津市的水平.在加减速工况所占比例上,综合工况值分别高于欧洲工况的 7.8%和 19.4%,匀速工况比例基本相当.而在怠速所占比例上,综合工况值略小于欧洲工况值,道路综合通行能力处于中等情况;但是拥挤道路工况与畅通行驶工况在怠速工况比例上相差较大,说明天津不同路段之间的道路工况相差比较大;近年来天津市快速道路网得到不断的完善和发展,使得非繁华地段的道路通行能力较高,相应地,其怠速比例也比较低.综合而言,以天津市为代表的车辆行驶工况和欧洲的 ECE15工况存在较大差异,使用本文方法构建出的工况更能代表我国车辆真实运行状况,能够为电动汽车基于道路行驶工况控制策略的自适应优化提供更为可靠和有效的基础数据.

表2 天津与欧洲行驶工况的比较Tab.2 Comparison of driving cycle between in Europe and in Tianjin
3 结 语
本文提出了一种基于 GPRS的远程数据采集方法,并通过自行开发的车载数据采集终端实现了电动汽车道路行驶数据的远程采集,为电动汽车的行驶工况开发提供了基础数据源.同时将 SOM网络应用于行驶工况的开发,利用 SOM 的聚类分析技术对输入的运动学片段进行分类和行驶工况的自学习,构建出拥挤、畅通和综合行驶 3种行驶工况.所构建的行驶工况与欧洲行驶工况的比较结果表明,SOM 自学习构建的行驶工况满足一般规律,能够反映天津市道路交通的特征.
[1] Dembski N,Guezennec Y,Soliman A. Analysis and experimental refinement of real-world driving cycles[C]// SAE Paper. Detroit,2002,2002-01-0069.
[2] 国家环境保护总局. GB 18352.1—2001 轻型汽车排气污染物排放限值及测量方法[S]. 2001.
Ministry of Environmental Protection of the People′s Republic of China. GB 18352.1—2001 Limits and Measurement Methods for Emissions of Pollutants from Light-Duty Vehicles[S]. 2001(in Chinese).
[3] 杨延相,蔡晓林. 天津市道路汽车行驶工况的研究(B)[J]. 汽车工程,2002,24(2):172-176.
Yang Yanxiang,Cai Xiaolin. Study on vehicle driving cycle on road in Tianjin(B)[J]. Automotive Engineering,2002,24(2):172-176(in Chinese).
[4] de Haan P,Mario K. Real-World Driving Cycles for Emission Measurements:ARTEM IS and Swiss Cycles(E)[R]. Swiss Agency for Environment,Forests and Landscape(SAEFL),2001.
[5] Meyer M. TCP performance over GPRS[C]//IEEE Wireless Communications and Networking Conference. New Orleans,USA,1999,3:1248-1252.
[6] Tsao Shiao-Li. Scalable gateway GPRS support node for GPRS/UMTS networks[C]// Proceedings of 56th IEEE Vehicular Technology Conference. Vancouver,Canada,2002,4:2239-2243.
[7] Mishra A. Performance and architecture of SGSN and GGSN of general packet radio service(GPRS)[C]//IEEE Global Telecommunications Conference,GLOBECOM '01. US,2001,6:3494-3498.
[8] Koikkalainen P. Tree structured self-organizing maps[G]// Oja E,Kaski S. Kohonen Maps. Amsterdam:Elsevier,1999:121-130.
[9] Kohonen T. Self-Organizing and Associative Memory[M]. Heidelberg:Springer,1984.
[10] 张敏灵,陈兆乾,周志华. SOM 算法、LVQ 算法及其变体综述[J]. 计算机科学,2002,29(7):97-100.
Zhang Minling,Chen Zhaoqian,Zhou Zhihua. Survey on SOM algorithm,LVQ algorithm and their variants[J]. Computer Science,2002,29(7):97-100(in Chinese).
[11] Ronald E K,Thomas A H. Development of the federal urban driving schedule[C]// SAE Paper. 1975,730553.
[12] 李孟良,李 洧,方茂东,等. 道路车辆实际行驶工况解析方法研究[J]. 武汉理工大学学报:交通科学与工程版,2003,27(1):69-72.
Li Mengliang,Li Wei,Fang Maodong,et al. The parse method of actual running cycle of vehicle on road[J].Journal of Wuhan University of Technology:Transportation Science and Engineering,2003,27(1):69-72(in Chinese).
猜你喜欢
数学物理学报(2021年6期)2021-12-21
数学物理学报(2021年5期)2021-11-19
数学物理学报(2021年3期)2021-07-19
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
汽车维修与保养(2021年8期)2021-02-16
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
动漫星空(兴趣百科)(2019年3期)2019-03-07
制造技术与机床(2018年11期)2018-11-23
海外星云(2016年17期)2016-12-01
