
地基多孔径成像系统验证实验设计
2010-11-06 08:04王晓明乔彦峰
中国光学 2010年6期
王晓明,乔彦峰
(1.中国科学院长春光学精密机械与物理研究所,吉林长春 130033;2.中国科学院研究生院,北京 100039)
1 引 言
近年来,无论是在空间科学领域还是军事应用领域,发展高分辨率成像技术都有着十分迫切的需求。在运用单孔径望远镜进行天文观测时,根据波动光学理论,衍射受限系统的最高角分辨率θ=1.22λ/D[1],其中λ为观测所用的单色光波长,D为单孔径望远镜的光学系统口径。可以看出,分辨率受波长和光学系统口径的限制。对于一定的工作波段,若要提高系统的角分辨率,只能通过增大光学系统口径的办法。而在实际应用中,诸如超大孔径系统的加工制造难度过大以及成本过高等不利因素限制了系统孔径的继续增大。
上世纪 70年代提出的多孔径成像技术为提高分辨率提供了新的方法[2~4]。光学合成孔径成像系统实现了用多个小口径光学系统来达到单个大口径光学系统等效分辨本领的目的,为进一步发展高分辨率成像技术提供了新的思路和方法。根据光束组合方式的不同,合成孔径成像系统可以分为迈克尔逊型和斐索型两种[5]。迈克尔逊型多孔径望远镜也被称作“光瞳面干涉”望远镜,该种类型望远镜一般用于天文观测,观测位置稳定,对分辨率要求特别高的天体目标[6]。斐索型多孔径望远镜也被称作“像面干涉”型望远镜,来自不同子孔径的光束成像在同一像面,从而得到目标的模糊像。此类望远镜可以对运动目标进行瞬时成像,一般用于目标的探测跟踪[7~9]。
国外在光学合成孔径成像技术方面的研究工作起步较早,并且已经取得了一定的研究成果[10]。1996年 2月,Baldwin及其同事发表了一幅用光干涉法得到的 Capella双星的二维平面图,这是用干涉成像望远镜 (英国剑桥大学光学孔径合成望远镜 COAST)获得的第一幅图像,在此之后,一大批地基多孔径望远镜陆续诞生,如美国的红外光学干涉阵 ( IOTA),美国的高分辨率成像阵(CHARA),澳大利亚悉尼大学的光干涉阵 (SUSI),美国海军天文台的成像光干涉仪阵 (NPO I),以及由亚里桑那大学和一些国际研究机构合作建造的大型双筒望远镜 (LBT)。

图1 VLTI光路图Fig.1 Light road map forVLT1
超大型望远镜阵列 (Very Large Telescope array,VLT)是欧洲地基光学系统的旗帜,也是世界上最先进的光学系统,由 4个直径 8.2 m的主镜和 4个口径 1.8 m的可移动辅镜组成。第一个8.2 m主望远镜 1999年装配完成开始工作,目前4个主镜和 4个辅镜都已开始工作。这些望远镜可以单独工作也可以2个或 3个一起工作,形成一个巨大的干涉阵列,来自不同望远镜的光束经地下隧道组合在一起,保证不同光束之间的光程差 <1μm,通过干涉仪 (VLTI)发生干涉,如图1所示。延迟器轨道在跨越 65 m后的水平误差 <25μm,轨道定位精度为 30μm,定位误差为20 nm,倾斜误差 <1.5″。该合成孔径光学系统基线可以达到 200 m,角分辨率为 0.001″,约为单个望远镜独立工作时的 25倍。2007年初,VLT系统的 4个主镜和辅镜全部投入了使用,在天文观测中取得了重要成果。
天基观测系统可以免受大气扰动影响,但系统的体积和重量受火箭运载能力的限制,多孔径系统易于折叠,质量轻,能很好地解决这一问题。目前由美国航空局正在研制的空间天文光学干涉仪 (Space Interferometer Mission,S IM)系统,采用的是迈克尔逊型结构,预计分别于 2012和 2016年完成。
S IM光学系统由科学测量干涉望远系统Science(Science Interferometer),导航干涉望远系统 Guide-1(Guide Interferometer)和高精度星跟踪系统 Guide-2(High-accuracy Guide Star-tracking Telescope)3部分组成,如图2所示。科学测量干涉望远系统由两个孔径 50 cm的子望远系统组成,基线长 6 m,分为大视场与小视场两种工作模式。在大视场工作模式下视场为 15°,测量精度为0.004″;在小视场工作模式下视场为 2°,测量精度为 0.001″。导航干涉望远系统 Guide-1由 2个孔径为 30 cm的子望远系统组成,基线长 4.2 m,视场范围很小,用来补偿指向误差。Science和Guide-1具有类似的光束组合器。高精度星跟踪系统 Guide-2的孔径为 30 cm,用于监视整个系统的指向,以便调整飞行器的姿态。目前,S IM光学系统已完成多项技术突破与科学测试。

图2 S IM光学结构Fig.2 Optical structure for S IM
我国在光学合成孔径成像技术方面的研究目前尚处于起步阶段。国家天文台、中科院南京天文仪器研制中心承担的 863预研项目曾开展综合孔径理论研究。2000年,国家天文台开展 863资助课题“光学综合孔径望远镜的预研究”工作,主要进行地基光学系统对天观测的研究工作。哈尔滨工业大学在“十五”期间开展了“光学多孔径技术及其应用”的预研工作。目前,其空间光学研究中心正在进行地面演示系统的研制工作。苏州大学、航天科技集团第五研究院 508所和北京理工大学在我国“十五”计划期间,在 973重大基础研究项目的支持下,承担了课题“甚高分辨率空间遥感器的研究”。苏州大学现代光学技术研究所近年来开展了稀疏孔径复杂光瞳光学系统成像理论的研究,并获得高等学校博士学科点专项科研基金资助。
本文结合靶场光测设备的工程要求,选取斐索型多孔径望远镜为研究对象,从几何光学理论出发,讨论了地基斐索型合成孔径成像系统实验的可行性,提出了保证合成孔径成像系统能够完善成像的解决方案。
2 多孔径成像系统成像原理
当观测目标处于无限远处时,来自观测目标的光到达望远镜时,可以认为是平行光。对于大部分观测目标,可以认为是非相干扩展光源,两个不同的点振动是统计无关的。单孔径望远镜的出瞳,可以看成大量“针孔”的集合,单孔径望远镜所成的像,可看成出瞳面内的所有可能的“针孔对”在像面上产生的大量正弦干涉条纹的叠加[3]。像强度频谱中空间频率 (νu,νv)的频率分量在出瞳上,至少有一对矢量间距为:

式中,λ为波长,Zi为像到出瞳的距离。因此,像的空间频率与出瞳面内的“针孔对”间距建立了对应关系,这就是光干涉成像原理。
如图3所示 ,针孔对aa′,bb′,cc′,dd′在频域内分别对应不同的点。从式 (1)中可以看出,长“针孔距”对应高频部分,短“针孔距”对应低频部分,“针孔距”越长,系统的分辨率越高。如果把上述出瞳面上各“针孔”视为直径有一定大小的子孔径,在像面处的成像就可称为多孔径成像。子孔径之间的距离线段称为基线,系统基线越长,该系统所能达到的分辨率越高。如何组合多个小孔径光学系统来达到单个大孔径光学系统的分辨本领,就是研究光学多孔径成像技术的目的。

图3 干涉成像原理图Fig.3 Interference imaging principle
斐索型多孔径望远镜也被称作“像面干涉”型望远镜,来自不同子孔径的光束成像在同一像面,得到目标的模糊像。斐索型多孔径望远镜有“共次镜”和“望远镜阵列”两种结构,如图4所示[5]。

图4 斐索型多孔径望远镜Fig.4 Fizeau-type multi-aperture telescope
在“共次镜”结构中,由于所有子孔径共用同一次镜,所以这种结构能够减少系统的中心遮拦。在“望远镜阵列”结构中,各子孔径是独立的望远镜,从子望远镜出来的光束通过光束组合器组合在一起,经成像次镜成像。斐索型多孔径望远镜成像过程可以用傅里叶光学中线性系统成像理论来解释,如图5所示[11]。

图5 斐索型多孔径望远镜成像过程示意图Fig.5 Imaging process of Fizeau-type multi-aperture telescope
望远镜成像实质上是一个图像退化过程,可以表示为:

式中f(x,y)为被测目标,g(x,y)为所成的目标模糊像,h(x,y)为系统点扩展函数,n(x,y)代表噪声,“* ”代表卷积运算,f′(x,y)为目标的清晰像。造成图像模糊的两个因素就是成像系统h(x,y)的线性操作引起的模糊以及噪声。图像恢复就是在已知h(x,y)和估计n(x,y)的基础上,进行反向运算,得到目标的清晰像。
斐索型多孔径望远镜的 U-V覆盖是通过缩短基线长度至子孔径直径数量级和子孔径自身的频率覆盖能力实现的,不用通过长时间的积累。此类望远镜可以对运动目标进行瞬时成像,一般用于目标的探测跟踪。
3 成像条件分析
位于近轴区域内的物点,利用近轴光线成像时,符合 (近似地)点对应点的理想成像关系。由于应用近轴光学公式计算出来的像可以作为衡量实际光学系统成像质量的标准,亦可以用它近似地表示实际光学系统所成像的位置和大小[12,13],下面讨论基于两个子望远镜合成孔径光学系统的成像条件。假定两个子望远镜的光轴相互平行,并且它们的入瞳分布于垂直于光轴的同一平面内。该合成孔径光学系统光路图如图6所示:

图6 合成孔径成像系统光路图Fig.6 Optical synthetic aperture imaging system
图6中,τ为子系统的角放大率:

式中f1为子望远系统主镜焦距,f2为与主镜共焦点的次镜焦距。
首先,考虑光轴上无穷远处点光源的情况。光线分别通过路径ACDE和BJK M,在保证DE与K M平行的情况下,调节光程ACDE和BJK M,使其相等,入射波前将等光程到达T点,则所有波长的光都将在T点形成干涉峰。
下面考虑无限远离光轴的点光源的情况。入射光与光轴的夹角为β,出射光与光轴的夹角为τ β,通过点A和B的光线分别经过路径AFGH和BNRS汇聚在点I。为了使子望远镜的干涉峰处于其衍射条纹中心,HQ波面应该具有相同的相位,即AH两点之间的光程应与PQ两点之间的光程相等,所以:

即:

由式 (5)可知,子望远系统的角放大率等于系统的线性缩放因子。对于合成孔径成像系统,子系统出射光束在合成成像时,要求其光束直径与间距必须是各子系统入射光束直径和间距的等比例缩放[14,15]:

从焦平面上的像点考虑,合成孔径成像系统可以等效为一个带有特殊形状孔径光阑的望远镜,基于两个子望远镜的合成孔径光学系统的等效系统示意图如图7所示,等效光阑的开口形状和位置分布与子系统孔径大小和位置分布一致,示意图如图8所示。

图7 合成孔径等效光路图Fig.7 Equivalent optical synthetic aperture

图8 光阑示意图Fig.8 Diaphragm diagram
4 实验系统参数设计及精度分析
根据现有实验条件,设计基于两个子望远镜的合成孔径成像实验,验证多孔径系统成像的可行性,实验原理如图9所示。图4(a)中子望远镜的角放大率为 -2倍,口径 2r=100 mm,两望远镜中心距L=150 mm;考虑五角棱镜出射光线与入射光线夹角为 90°以及等腰屋脊棱镜入射光线与出射光线平行的特点,为了达到降低系统装调的难度的目的,实验中用五角棱镜和直角屋脊棱镜代替平面反射镜实现光路折,其光路示意图如图10所示。五角棱镜 2固定在微调组件上,通过微调组件的运动来保证上面讨论的式 (6),直角屋脊棱镜 2通过压电直线精密驱动器的调整来保证两束光相位同步。从平行光管 (口径 300 mm)发出的平行光,经过子望远镜和折转光路后中心距为 75 mm,且相位同步,经光束组合器后成像在焦平面处的 CCD相机上,经过图像恢复技术,得到目标的清晰像。平行光管的焦平面上可以放鉴别率板,来检测系统的分辨率。

图9 合成孔径成像系统实验原理图Fig.9 Principles of synthetic aperture imaging system experiment
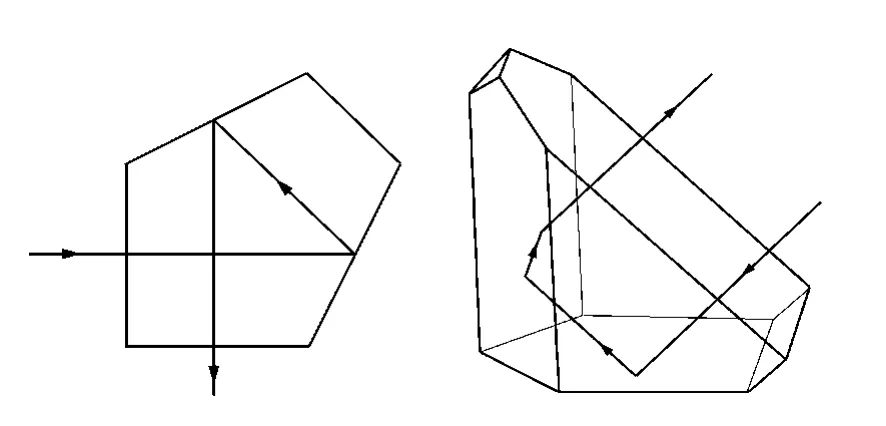
图10 五角棱镜与直角屋脊棱镜光路示意图Fig.10 Pentagonal pris m and roof pris m optics to indicate right angles
微调组件结构如图11所示,直线步进电机固定于微调机构的底座上,消隙螺母直接固定于滑架上。电机旋转直接推动滑架沿精密圆导轨做直线运动。同时滑架带动直线位移传感器做直线运动,提供位置信息反馈。本实验采用由直线步进电机驱动的微调机构,该机构的分辨率取决于所选用的直线步进电机的步长。

图11 微调组件结构图Fig.11 Fine-tuning components chart
瑞利判据提出:如果一个光学系统的光程差小于或等于 1/4波长 (光波长的 1/4),则该光学系统的性能就可与完善系统的性能相媲美。在这种情况下,一个物点的像就接近于完善的爱里斑,因此系统完善成像时需满足:

CCD相机的像元数为N×N,化简得[10]:

只要保证微调精度控制在这一误差范围内就可以获得比较清晰的像。
对于实验选用的像元数为 1 024×1 024的CCD探测器,望远镜中心距为L=150 mm,子望远镜的焦距比f2/f1=1/2,由式 (8)可知:微调机构的分辨率应大于 0.073 mm。
考虑到加工、装调误差等因素,要求微调机构的分辨率按小于 ±0.03 mm考虑,电控与机构各分配 ±0.015 mm。拟选用海顿 28000系列直线步进电机,其步长为 0.0032 mm。因为0.003 2 mm<0.015 mm,所以该微调机构满足系统成像要求。
选用的压电直线精密驱动器用于保证两束光相位同步,其结构如图12所示[16]。该结构主要由定子箝位体和直线动子两部分组成,定子箝位体上安装有箝位动力压电叠堆,直线动子上安装有驱动动力压电叠堆,通过各压电陶瓷叠堆的协调工作,使直线动子在定子导向孔中运动。压电直线精密驱动器具有高频率、高速度、大行程、高分辨率和大驱动力的特点,其分辨率能够达到0.05μm(约为光波长的 1/10),能够满足系统成像光束同相位的设计要求。
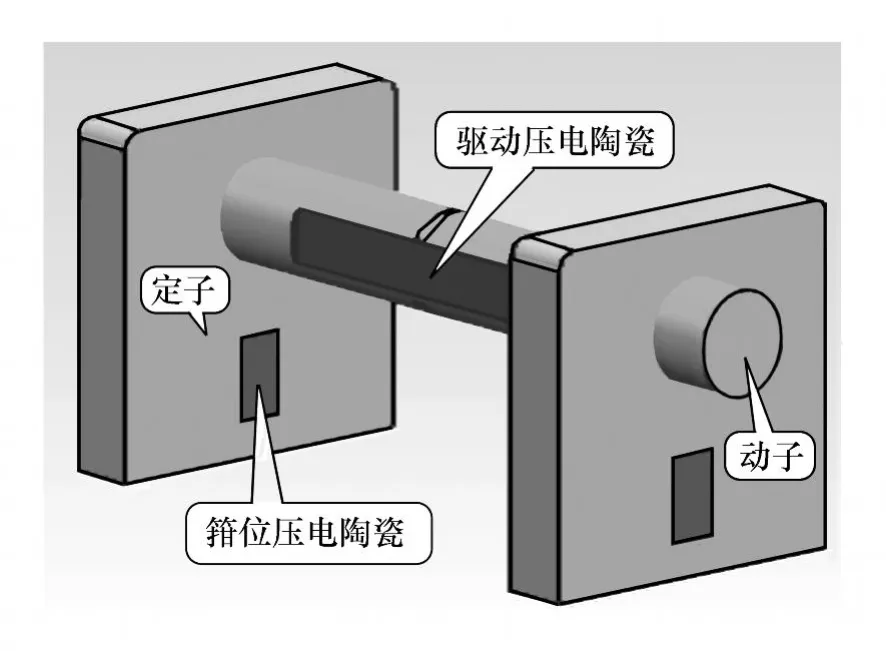
图12 压电直线精密驱动器结构图Fig.12 Structure of piezoelectric linear actuator
5 结 论
本文基于几何光学理论讨论了多孔径成像系统的成像条件,对关键成像条件进行研究,提出了一种验证光学合成孔径系统成像的实验方法,设计使用的微调机构与精密驱动器的分辨率分别达到了 ±0.03 mm与 0.05μm。该方法装调难度较小,便于实现,为后续的相关研究奠定良好的基础和平台,亦可检测得到合成孔径成像系统的分辨率的确切值,具有重要的工程应用价值。
[1] 郁道银.工程光学[M].2版.北京:机械工业出版社,2006.YU D Y.Engineering Optics[M].2nd ed.Beijing:Machinery Industry Press,2006.(in Chinese)
[2] 乔彦峰,刘坤,段相永.光学合成孔径成像系统发展概况[J].中国光学与应用光学,2009,2(3):1-9.Q IAO Y F,L IU K,DUAN X Y.The development of optical synthetic aperture imaging system overview[J].Chinese J.Opt.and Appl.Opt.,2009,2(3):1-9.(in Chinese)
[3] MATTEW P,MAJEED M H.Estimation of vibration spectra including vibrating directionwith synthetic aperture radar[J].SPIE,2010,7699:76990L.
[4] N IM S,IRW IN J W.Optical synthetic aperture imaging with spatial heterodyne interferometry[J].SPIE,2009,7468:74680Q.
[5] 王海涛,周必方.光学综合孔径干涉成像技术[J].光学精密工程,2002,10(5):434-437.WANG H T,ZHOU B F. Interference optical synthetic aperture imaging technique[J].Opt.Precision Eng.,2002,10(5):434-437.(in Chinese)
[6] GIESEN P,OUWERKERKB,vanBRUGA H,et al..Mechanical setup for optical aperture synthesis forwide field imaging[J].SPIE,2009,5528:361-371.
[7] 龙伟军,王治乐,周彦平.光学综合孔径望远镜成像分析及计算机仿真[J].光学学报,2004,24(8):1009-1011.LONGW J,WANG ZH L,ZHOU Y P.Optical aperture synthesis telescope image analysis and computer simulation[J].Acta Opt.Sinica,2004,24(8):1009-1011.(in Chinese)
[8] 刘欣悦,董磊,王建立.稀疏采样傅里叶望远镜成像[J].光学精密工程,2010,18(3):521-527.L IU X Y,DONGL,WANG J L.Sparse sampling Fourier imaging telescope[J].Opt.Precision Eng.,2010,18(3):521-527.(in Chinese)
[9] 明名,王建立,张景旭.大口径望远镜光学系统的误差分配与分析[J].光学精密工程,2009,17(1):104-108.M INGM,WANG J L,ZHANG J X.Large aperture telescope optical system and analysis of error distribution[J].Opt.Precision Eng.,2009,17(1):104-108.(in Chinese)
[10] 陈晓丽,沈洪兵,杨秉新,等.稀疏孔径成像系统发展概况[J].航天返回与遥感,2006,27(1):23-27.CHEN X L,SHEN H B,YANGB X,et al..Overview of the development of sparse aperture imaging system[J].Spacecraft and Remote Sensing,2006,27(1):23-27.(in Chinese)
[11] 陈欣杨.斐索型天文光学综合孔径望远镜的若干关键技术研究[D].上海:中国科学院上海天文台,2006.CHEN X Y.Fizeau-type optical aperture synthesis telescope astronomical number of key technologies[D].Shanghai:Shanghai Astronom icalObservatory,Chinese Academy of Sciences,2006.(in Chinese)
[12] 季家镕.高等光学教程[M].北京:科学出版社,2007.J IJ R.Advanced Optics Tutorial[M].Beijing:Science Press,2007.(in Chinese)
[13] 吴泉英,钱霖,沈为民.两种稀疏孔径系统的成像研究[J].光学精密工程,2006,14(1):26-33.WU Q Y,Q IAN L,SHEN W M.Studying about two sparse-aperture imaging system[J].Opt.Precision Eng.,2006,14(1):26-33.(in Chinese)
[14] ME INEL A B.Aperture synthesis using independent telescopes[J].Appl.Opt.,1970,9(11):2501-2504.
[15] 王治乐,张伟.斐索型光学合成孔径系统近轴成像条件研究[J].应用光学,2004,25(5):3-6.WANG ZH L,ZHANGW.Fizeau optical synthetic aperture imaging system,conditions of near-axis[J].Appl.Opt.,2004,25(5):3-6.(in Chinese)
[16] 刘建芳,杨志刚,范尊强,等.压电直线精密驱动器研究[J].光学精密工程,2005,13(1):65-72.L IU J F,YANG ZH G,FAN ZQ,et al..Piezoelectric linear precision actuator[J].Opt.Precision Eng.,2005,13(1):65-72.(in Chinese)
猜你喜欢
阅读(科学探秘)(2022年5期)2022-06-07
奥秘(2021年3期)2021-04-12
中学生数理化·八年级物理人教版(2018年11期)2019-01-31
小哥白尼(趣味科学)(2018年6期)2018-09-14
西南石油大学学报(自然科学版)(2018年2期)2018-06-26
制造技术与机床(2017年11期)2017-12-18
CHINESE JOURNAL OF AERONAUTICS(2017年5期)2017-11-17
雷达学报(2017年1期)2017-05-17
摄影之友(影像视觉)(2017年12期)2017-02-08
杂文月刊(2016年11期)2017-01-10
