
自动变形监测系统集成数据库的设计与实现
2010-11-15 08:43贵慧宏
测绘工程 2010年1期
贵慧宏,张 锦
(太原理工大学 测绘科学与技术系,山西 太原 030024)
自动变形监测系统集成数据库的设计与实现
贵慧宏,张 锦
(太原理工大学 测绘科学与技术系,山西 太原 030024)
指出自动变形监测系统引入集成数据库技术的必要性。从自动变形监测系统的组成、软件功能设计以及实现过程等方面,分析集成监测数据库的结构,并采用E-R建模方法构建其概念模型。使用Power Designer软件将概念模型自动转化为物理模型并生成SQL脚本文件,满足自动变形监测的应用需求。
变形监测;传感器;测量机器人;ER模型
目前,测量机器人[1]、GPS等技术已经广泛应用于变形监测领域。测量机器人的自动目标识别、自动照准、读数等功能以及 GPS全天候、实时、无需通视的作业特点不仅降低了工作强度、提高了作业效率,还为变形监测实现自动化奠定了基础。借助于计算机和通信技术构建实时连续的自动变形监测系统已经成为当代变形监测工作的重要内容。近年来,国内外以测量机器人和 GPS技术为基础,对变形监测的自动化实现相继展开研究,并取得了一定成果。国内的主要有武汉大学测绘学院的 Geo_ADMOS、解放军信息工程大学测绘学院的ADM S自动变形监测系统[2],主要实现了测量机器人的自动测量;国外的有瑞士徕卡公司的 GeoMoS自动监测系统[3]、加拿大新布伦瑞克大学的D IMONS监测系统[4-5]等,在实现自动测量的基础上允许接入多种类型传感器并实现协同作业。其中,GeoMoS自动监测系统主要分为Monitor和Analyzer[6]。Monitor可连接入气象、倾斜等多种传感器,而且可通过TCP/IP方式获取 Spider参考站软件[7]的 GPS自动解算成果,并将监测成果存入服务器;而Analyzer可以通过访问服务器中的数据库来实现监测数据的查询和分析。
随着监测技术的发展,传感器类型的增多、监测区域和监测领域的扩大必将成为监测系统发展的主要趋势。随之产生的就是数据类别增多和数据量增大问题;旧有的以文件方式管理数据的方法必然会严重影响监测系统的作业效率。而数据库技术以其数据结构化、独立性高、共享性高、冗余度低等特点能够很好地解决这一问题。此外,结合变形区域的现有数据(如遥感影像、常规测量成果等)综合分析监测数据以获取监测对象的变形量及其诱因也是变形监测的重要内容。要实现这一目标就必须正确高效地使用和管理多源数据,这也需要数据库技术的支持。由此可见,系统数据库设计是监测系统构建的必要环节。本文通过对自动变形监测系统的组成、软件功能设计以及实现过程中需关注问题的分析,完成了自动变形监测系统数据库的设计和实现,并在运行中取得了良好的效果。
1 系统组成
变形监测的主要内容是对变形体的关键部位或重要构筑物,进行反复周期性观测获取其变形量。而自动变形监测指利用监测中心端的监测软件通过指定的通讯方式向传感器发送观测指令,传感器完成作业后以相同方式将获取的数据传送回监测中心,由监测软件存入数据库并完成解算。因此,可以将自动变形监测系统分为传感器、通讯链路和软件系统三部分(见图1)。软件系统与传感器之间的通讯链路由电缆、Modem、LAN、WAN、GSM 或无线电等方式建立[8]。本文中将系统中具有协作关系的传感器以节点方式绑定,方便传感器管理和监测数据解算分析。下面以图1中的节点1和节点2为例,描述节点内传感器的协作过程。
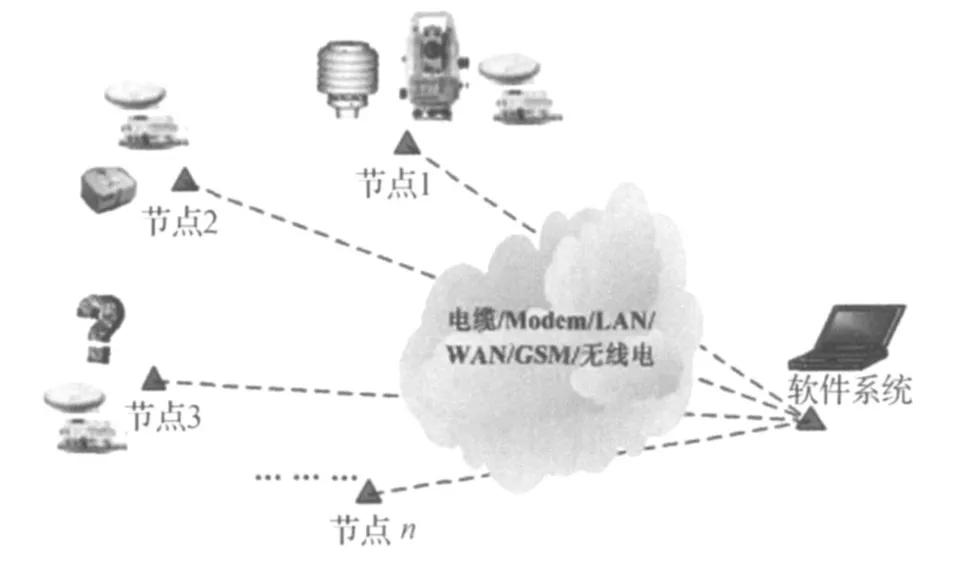
图1 自动变形监测系统结构图
1)节点1(测量机器人、GPS和气象传感器):测量机器人、GPS和气象传感器协同作业是变形监测中最常见的作业模式。在这一模式下,系统结构主要由基准点、测站点和目标监测点组成。基准点提供变形监测基准,监测测站点和后视点的位置变化;测站点用于安置测量机器人,目标点则安装监测棱镜。GPS可布设于测站点或基准点,而气象传感器则可以具体情况安装在变形区域内,一般安置于测站点或基准点。通过定期在测站点安置 GPS或设置偏心观测站,可更新测量机器人测站点位置。该模式下目标棱镜点的空间位置可由 GPS获取的最新测站坐标、测量机器人获取的角度距离以及气象传感器获取的温度气压等综合解算求得。
2)节点2(GPS和倾斜传感器):倾斜传感器、位移传感器等传感器仅能获取变形的相对量,而 GPS可以获取目标点的绝对位置。因此,通过协作就能够获取目标点的绝对变形量,适用于一些构筑物的监测,如桥梁、高层建筑等。
通过对节点1与节点2的描述可知,不同类型传感器(Sensors)所作用的目标监测点(Targets)数各不相同,如测量机器人的目标监测点可根据监测需求增减,而倾斜传感器只能作用于单个目标监测点。而节点(Nodes)是由相互间存在协作关系的传感器通过绑定(Node Item s)构成。因此,目标监测点的解算方法(ResultExs)由作用于它的传感器所在节点的类型(NodeTypes)决定。至于传感器的通讯方式及其设置参数(ComuParam s)可作为属性保存。具体E-R模型如图2所示。

图2 ER模型(略去实体的属性对象)
2 系统软件功能设计
实现变形监测过程的实时、连续、高效和自动化是自动变形监测系统的总体目标。因此,作为系统重要组成部分的监测软件,首先,必须能够连接各类传感器并接收、存储其监测数据。
GPS作为自动变形监测的主要手段,要实现实时自动化作业,软件系统就必须具备自动接收和解算 GPS数据的能力;而 GPS数据的自动接收和解算主要包括通信链路的创建与管理、数据的格式转换与存储、数据预处理、基线解算、平差计算和坐标系统转换等,比较复杂。因此,系统只存储 GPS自动解算软件处理后的目标监测点的空间坐标。而其他测量传感器的数据格式相对简单,由系统直接处理和存储。下面简要介绍几种常用测量传感器的数据类型。测缝计是一种用来测量变形体表面、内部裂缝开合度的传感器,主要获取裂缝的水平张开位移、水平错动位移和垂直错动位移[9];位移传感器,又称为线性传感器,用于测定目标点的空间位置变化量,其数据类型为横向、纵向和高程方向上的位置变化量;倾角传感器,顾名思议,是用于测量相对于水平面的倾角变化量的,其数据类型为角度。而气象传感器作为测量机器人的辅助传感器,测量的物理量为气压、温度、湿度等,用于计算气象改正参数,以提高测量机器人的观测精度。
测量机器人作为自动变形监测系统的关键技术,其作业流程如图3所示。新建测站点、基准点和目标点,并通过创建点组的方式对其进行组织管理;初始化全站仪,主要包括设置计算机与仪器之间的通讯参数,如通讯接口、波特率、奇偶校验等;为各点组新建测量周期,包括自动测量的起止时间、测量频率等,并设置限差;执行自动测量,主要指测量机器人自动观测,并判断观测结果是否超限的过程;最后,对未超限的观测结果进行存储和解算及预警预报。

图3 测量机器人自动作业流程
综上所述,自动变形监测软件可以分为系统初始化、点与点组创建、传感器管理、自动测量和数据模型解算5个功能模块。
1)系统初始化:主要包括限差和系统参数(Database Info)设置,如气压、温度、角度和距离单位等。限差包括测量限差(M easureLim its)和预警限差(A larm Limits)。测量限差指对测量机器人测量成果的检校,如2C互差、指标差等;预警限差用于确定变形量多大时发送警报。
2)点与点组创建:在该模块中既可直接通过输入空间坐标定义点(Targets),也可以利用测量机器人学习返回的坐标创建点。而点组(TargetCollections)的主要功能是组织点,方便测量机器人测量周期的设置。根据点组类型(Collection Type)的不同,点组在自动测量过程中优先级也不同。当不同类型点组的观测周期冲突时,级别高的点组优先测量。
3)传感器管理:包括传感器(测量机器人 -TPSSenso rs,其他传感器-OtherSenso rs)的通讯方式和参数设置、节点的创建及其与传感器的绑定。此外,还应包括为各传感器指定空间位置点。
4)自动测量:为各传感器自动作业设置周期(Cycles),主要包括起止时间和观测间隔。针对测量机器人还包括单/双面观测、观测次序(顺/逆时钟或自定义顺序)、测量方法(极坐标或方向观测法)等方面的设置。
5)数据模型解算:指将传感器的直接测量结果按照指定的解算方法(ResultExs)计算出最终成果(Results)。这里需要强调的是,在本系统数据库中GPS直接保存其空间坐标不涉及原始观测数据;测量机器人的直接观测结果则单独存储在一个表中(TPSM easurements)。而其他传感器的直接观测数据都保存于表OtherObservations中,在数据分析解算时系统按照记录类别(Senso r_Type)字段辨别。
此外,自动变形监测系统中要求记录自动测量过程中所有操作(Actions)和反馈信息(Feedbacks)。系统为每个测量机器人目标点赋予4种坐标(Locations),分别为当前坐标、基准坐标、扫描坐标和参考坐标,并设定其更新规则,以便准确识别目标点。从变形分析的角度,为了便于用户查看变形体某一方向的偏移量,设置剖面(Profiles),剖面的角度即用户所关心的变形方向,如大坝监测中的坝体走向等。
综上所述,设计了图4的支持自动变形监测系统的数据库结构,并采用 E-R模型列出了主要实体和关系。

图4 ER模型(略去实体的属性对象)
3 系统数据库实现及应用
在系统数据库概念模式的设计过程中,遵照关系数据库的规范化理论,保证大部分的表格的设计达到3NF标准,尽量减少数据的冗余和确保数据的一致性;同时也从数据库的实用方面考虑,允许部分数据表存在冗余。在概念模式完成后,使用Powersoft公司的S-DESIGNER12作为开发工具,将概念模式自动转化为物理模式,并生成SQL脚本文件;在SQL Server数据库查询分析器中运行该文件,实现自动变形监测数据库的创建。SQL脚本文件中创建坐标(Locations)表的代码如下:


通过上述方式,在数据库中总共生成了25个分别用于存储工程、测量传感器观测、通讯、自动作业的基本参数表,观测和解算结果及预警数据等信息;此外,创建了目标点坐标、测量成果和解算成果3个视图以提高数据查询分析效率。基于该数据库,研发了实时自动化监测和预警系统(见图5),实现了监测数据的自动采集、解算、分析和预警预报,目前,已完成在露天矿区沉降监测应用中的测试,取得较好效果。借助于数据库技术,该系统不仅保证了数据的安全性和高效管理,同时也为数据共享和集成分析提供了基础。图6、图7分别为项目数据的成果导出和图表分析模块。

图5 实时自动化监测和预警系统

4 结束语
不断增长的需求和监测技术的发展使得构建集成监测数据库和基于集成监测数据库的自动化监测系统势在必行。本文所设计的集成监测数据库模型具备支持连续、实时和兼容多种监测传感器等的自动变形监测系统,在实现过程中采用了S-DESIGNER12数据库设计软件,最大程度保证了数据库结构的可用性。该数据库模型已应用于自主开发的变形监测软件,在监测工作过程中取得了良好效果,对自动变形监测系统软件的研制具有一定的参考价值。
[1]张正禄.测量机器人介绍[J].测绘通报,2001(5):17.
[2]徕卡自动全站仪监测应用专辑[Z].徕卡测量系统有限公司(香港),2001.
[3]袁成忠.智能型全站仪自动测量系统集成技术研究[D].成都:西南交通大学,2007.
[4]JAM ESLU TES,ADAM CHRZANOWSKI,GEOFFREY BASTIN,et al.Dimons software fo r automatic data collection and automatic defo rmation analysis[A].The 10th FIG International Symposium on Deformation Measurements[C],2001,101-109.
[5]RICK W IL KINS,GEOFFREY BASTIN,ADAM CHRZANOWSKI.A lert:a fully automated disp lacement monitoring system[CD].Calgary:the CAM I 2003 Conference,2003.9.
[6]GeoMoS帮助文档[Z].徕卡测量系统有限公司,2007.
[7]J.VAN CRANENBROECK,L.TROYER.Leica GPS Spider for Deformation Monitoring[OL].http://www.leica-geosystem s.com.
[8]KARL SIPPEL.Modern monitoring system software development[A].The 10th FIG International Symposium on Defo rmation Measurements[C].2001:88-100.
[9]方绪顺,霍家平.整体式 TS型三向测缝计构造及精度分析[J].水电自动化与大坝监测,2008,32(4):48-51.
Design and implementation of integrated datebase in automatic deformation monitoring system
GU IHui-hong,ZHANG Jin
(Surveying Science and Technology Department,Taiyuan University of Technology,Taiyuan 030024,China)
Point out the necessity of adop ting integrated database technology in the automatic deformation monitoring system.Based on the system’sarchitecture and the design and realizing p rocessof software,analyze the database’s structure of automatic defo rmation monito ring system and build its concep tual model w ith ER(Entity-Relationship)modeling method.Then translate themodel to physical datamodel and generate an SQL scrip t file by using Pow er Desigher software to meet the app lication requirementsof automatic defo rmation monito ring.
deformation monitoring;sensor;georobot;ER model
P208
A
1006-7949(2010)01-0053-05
2009-02-05
山西省自然科学基金自主项目资助(2007011052)
贵慧宏(1984-),男,硕士研究生.
[责任编辑刘文霞]
猜你喜欢
学生天地(2020年5期)2020-08-25
中国化妆品(2017年12期)2017-06-27
测绘科学与工程(2017年1期)2017-05-04
小天使·一年级语数英综合(2017年3期)2017-04-25
莫愁(2017年9期)2017-04-07
汽车博览(2016年9期)2016-10-18
太空探索(2016年7期)2016-07-10
太空探索(2015年8期)2015-07-18
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
