
微机械隧道陀螺的振动特性测试
2011-01-17 05:15李文望王凌云
中国测试 2011年1期
李文望 , 王凌云
(1.厦门理工学院机械工程系,福建 厦门 361024;2.厦门大学机电工程系,福建 厦门 361005)
微机械隧道陀螺的振动特性测试
李文望1,2, 王凌云2
(1.厦门理工学院机械工程系,福建 厦门 361024;2.厦门大学机电工程系,福建 厦门 361005)
结合微机械陀螺仪和隧道效应的特点,提出了角振动微机械隧道陀螺仪的工作原理和结构设计方案。针对微机械陀螺的驱动和检测在面内和面外的结构特点,制定了图像处理法、静电力阶跃激励法和机械激励法等振动特性测试方法,在大气环境下分别对隧道陀螺仪驱动和检测模态的振动特性进行了测试,得到了相应的谐振频率,采用不同的方法得到的结果基本一致。
微机械隧道陀螺仪;驱动模态;敏感模态
1 引 言
微机械隧道陀螺是近年发展起来的一种新型的微陀螺,它利用隧道电流对位移变化的高敏感特性检测角速度的变化,根据微机械隧道陀螺仪工作方式及特点[1-4],对其驱动模态及检测模态固有频率初步测试,是对隧道陀螺仪进行进一步反馈控制及提取外界角速度输入的基础,也是对微机械隧道陀螺仪设计方法及工艺效果进行评价的有效检验手段。
2 角振动微机械隧道陀螺仪的结构和工作原理
微机械隧道陀螺仪与其他检测方式微陀螺相比,结构设计原理基本相同,但由于电子隧道效应对电极间距的变化极其敏感,且制作工艺存在误差,所以微机械隧道陀螺在敏感和驱动方向上的正交误差要尽可能小。否则,驱动方向上的位移会引起隧尖的横向运动,导致隧尖的横向敏感。如果电极表面较粗糙,就会给陀螺检测引入噪声,因而支撑隧尖的敏感梁在驱动方向上应具有足够的刚度[5-11]。
图1所示是角振动微机械隧道陀螺仪的结构图,当陀螺接通电源时,悬臂梁在偏转电极的静电力吸引下发生偏转,使隧尖靠近检测电极,进入隧道效应的工作状态。同时,变截面支撑梁在两边扇形固定梳齿驱动下,在XY平面内做往复角振动,当陀螺仪在X方向上有输入角速度时,扇形梳齿可动部分由于受到Coriolis力将产生Z方向的位移,该位移通过变截面梁传递到与其连接的悬臂梁,导致隧道间距发生改变。由于隧道效应对位移的敏感性,通过检测隧道电流的大小就可以检测出X方向输入角速度大小。
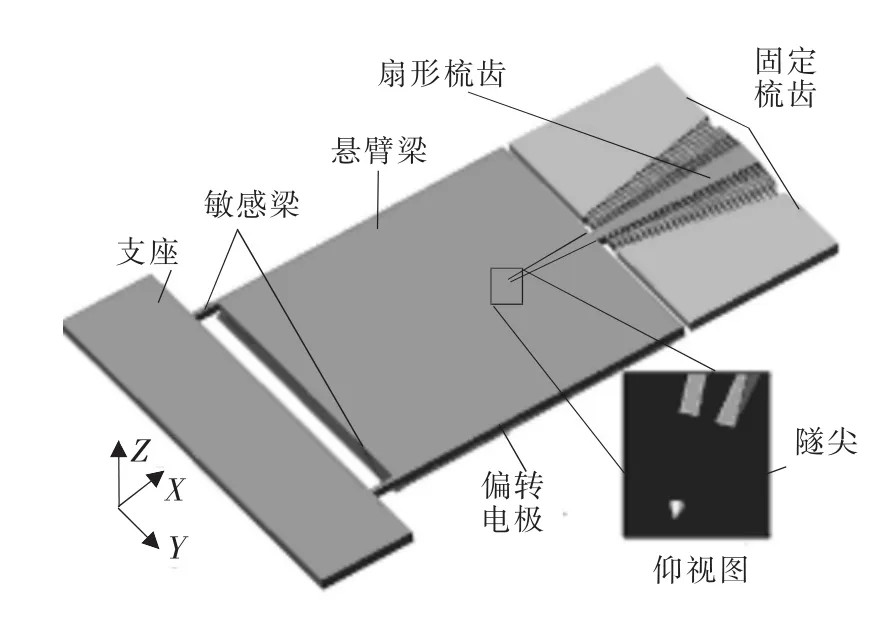
图1 角振动微机械隧道陀螺仪效果图
该结构方案的特点在于驱动和检测方向采用相互独立的支撑梁结构,避免了两个方向的正交耦合。同时,采用两个敏感梁左右支撑,进一步抑制了隧尖的横向振动。另外,扇形驱动随着半径的增大,驱动振幅相应增大,因而Coriolis力也相应增大,提高了陀螺仪的机械灵敏度。
3 微机械隧道陀螺仪的振动特性测试方法
3.1 驱动梁振动特性的测试方法
(1)图像法。由于陀螺驱动模态的振动方向是在面内振动,因而可以通过光学显微镜方便地观察结构在静态和动态振动下的位移,并可借助CCD和图像处理软件实现图像记录和位移测量。在谐振测试时,分别记录正弦激励频率及该频率下的最大振幅,绘制出幅频曲线便可得到陀螺仪在驱动方向上的谐振点。图像法测试谐振的测试平台主要由探针台、显微镜、信号发生器、功率放大模块、示波器、电源、CCD及计算机等组成。图像法测试振动特性具有所见即所得的特点,在显微镜放大倍数足够高的情况下,具有较高的可靠性和真实性。
(2)静电阶跃激励测试法。如图2所示是静电阶跃激励法测试驱动梁振动特性的示意图。其测试原理为:当开关K断开或闭合瞬间,驱动梁受到静电力的阶跃激励,其阻尼自由振动引起可动梳齿与另一固定梳齿间电容改变,导致该电容上的充放电电流发生改变。该电流的变化过程,间接反映了振动梁的阶跃响应特性。静电阶跃激励法充分利用了微陀螺在驱动方向上的结构特点,并通过C/V方法得到驱动梁在静电冲击下的响应情况,由于其可以检测到纳米级的微小位移,因而该法具有较高的测量精度。
测试过程中,在可动梳齿上施加Vp=1V固定电压,两定齿中的一个定齿通过一开关K连接到另一固定电压Vi上,Vi的大小在30~70V间;另一固定梳齿与I-V放大器相连接,其输出信号通过A/D采集卡记录于计算机中,通过LabVIEW和Origin等数据处理软件对测试结果进行分析,便可得出驱动梁的动态特性参数。
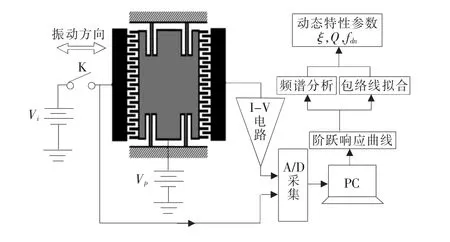
图2 静电阶跃激励法振动测试示意图
3.2 检测梁振动特性的测试方法
由于检测方向都在垂直方向上,且受到隧尖位移的限制,在垂直方向上检测梁的最大位移仅为1μm左右,因而很难用前述光学方法分辨出振动位移的大小。另外,由于在垂直方向上只有一个电极可用,因而也很难采用静电激励方法测试垂直方向上的振动性能。基于这些特点,设计了如图3所示的机械激励-电容检测的方法测试悬臂梁在检测方向上的振动特性。由于悬臂梁的振动引起其与偏转电极之间的电容发生改变,通过I-V放大电路检测出电容变化过程中产生的充放电电流,经A/D数据采集和频谱分析软件,便可提取出检测梁在机械激励下的谐响应情况。测试中,必须使陀螺仪检测梁的振动方向与激振器激振方向保持一致,信号发生器产生某一频段正弦扫频信号经功率放大器后驱动激振器,当激励频率与检测梁频率一致时,使充放电电流发生较为明显的变化。因此,由频谱分析便可识别出陀螺在检测方向上的固有频率。
4 角振动隧道陀螺仪的振动测试及分析
4.1 驱动梁的固有频率测试

图3 机械激励法测试检测梁振动示意图
在扇形梳齿的两固定齿上分别施加Vd+Vasinωt和Vd-Vasinωt的激励信号时,驱动梁将在该静电激励下产生振动,当改变激励频率ω时,则可通过图像法找到驱动梁的谐振点。用40 V+10 Vsinωt和40 V-10Vsinωt的驱动信号分别加在陀螺仪两固定梳齿下,驱动梁产生如图4所示的谐响应振动。通过图像法,记录不同驱动频率下驱动梁振动图像,提取出相应振动角度,便得到如图5所示的频响曲线。由此可见,驱动梁的谐振频率为6335Hz。

图4 驱动梁在正弦激励下的振动

图5 图像法得到的角振动陀螺仪频响曲线
为了验证图像法所测试驱动梁的谐振频率,采用静电阶跃激励法对角振动陀螺仪进行了进一步测试。在图2所示的Vi上加上60V直流电压,当开关K闭合瞬间,通过示波器得到如图6(a)所示阶跃响应曲线(CH1),CH2为连接Vi的变化曲线。当驱动梁受到静电力的阶跃激励后,将在新的平衡位置做阻力衰减自由振动,由于是小阻尼自由振动,因而可以认为其衰减振动频率即为驱动梁在驱动方向上的固有频率[4]。其振动数据的频谱分析如图6(b)所示,从该结果得到的驱动梁谐振频率为6340Hz,因而,进一步验证了图像法所得结果的可靠性。
4.2 检测梁固有频率测试

图6 静电阶跃激励法测试驱动梁谐振频率

图7 角振动隧道陀螺仪检测梁的机械激励测试
角振动隧道陀螺仪检测梁的振动特性测试采用机械激励-电容检测方法。测试中使用信号发生器产生6.5~8 kHz的扫频信号,该信号经功率放大器放大后,驱动JZK-1(江苏联能电子有限公司)型激振器,在悬臂梁上施加1V的固定电压。图7(a)为截取的一次扫频过程中悬臂梁在检测方向上所产生的谐响应曲线,该数据经频谱分析后所得的谐响应频谱图如图7(b)所示,可得检测梁在检测方向上的谐振频率为7 637Hz,略低于理论设计的7794Hz。
5 结束语
利用图像法和静电阶跃激励法分别测得角振动隧道陀螺仪在驱动方向的谐振频率以及通过机械激励-电容检测的方法得到角振动陀螺仪在其检测方向谐振频率与理论设计接近,为隧道陀螺仪进行进一步反馈控制及提取外界角速度输入打下扎实的基础。
[1]孙道恒.一种微机械隧道陀螺仪原型方案初探[J].微纳米科学与技术,2000,5(1):106-108.
[2]裘安萍,苏 岩,周百令.基于隧道效应的微机械角速率传感器[J].中国惯性技术学报,2000,8(4):75-79.
[3]Kubena R L,Vickers-Kirby D J,Joyce R J.A new tunneling-based sensor for inertial rotation rate measurements[J].Journal of Microelectro-mechanical Systems,1999,8(4):439-447.
[4]董煜茜,高钟毓,张 嵘.一种振动轮式微机械陀螺仪的特性研究[J].中国惯性技术学报,1999,7(2):30-34.
[5]Geiger W,Butt W U,Gaisser A,et al.Decoupled microgyros and the design principle DAVED[J].Sensors and Actuators,2002,95(2-3):239-249.
[6]康 新,董萼良,裘安萍,等.振动式微机械陀螺动态特性光学测试[J].光学学报,2006,26(2):202-206.
[7]徐铭陶,肖明葵.工程动力学振动与控制[M].北京:机械工业出版社,2004:228-248.
[8]王曙霞,梁洪洁,王小营,等.基于虚拟仪器的机械陀螺仪测试系统研究[J].电子设计工程,2010,18(6):42-44.
[9]Chen Y.A novel tuning fork gyroscope with high Q-factors working at atmospheric pressure[J].Mirosystem Technologies,2005,11(2-3):111-116.
[10]Acar C,AndreiM S.Structurally decoupled micromachined gyroscope with post-release capacitance enhancement[J].J.Micromech.Microeng,2005(15):1092-1101.
[11]Ding H T,Liu X S,Cui J,et al.A bulk micromachined Z-Axis single crystal silicon gyroscope for commercial applications[C]∥Proceeding of the3rd IEEE Int.Conf.on Nano/Micro Engineered and Molecular Systems.Sanya,2008:1039-1042.
Vibration measuring methods of m icro-machined tunning gyroscope
LIWen-wang1,2,WANG Ling-yun2
(1.Department of Mechanical Engineering,Xiamen University of Technology,Xiamen 361024,China;(2.Department of Mechanical and Electrical Engineering,Xiamen University,Xiamen 361005,China)
Based on the characteristics of micro-machined gyroscope and tunneling effect,the principle of operation and structure design of angular vibrating tunneling gyroscope have been introduced.Given the vibration direction of driving and sensing mode in in-plane and out-ofplane,several vibration measuring methods,including image processing,electrostatic force step stimulation and mechanism excitation,were utilized to test the vibration characteristics of the driving and sensing model of the tunneling gyroscope under the atmosphere environment,the resonance frequency and quality factor of the tunneling gyroscope were also obtained.The same results are obtained by different methods.
micro-machined tunneling gyroscope;driving mode;sensing mode
TH703.8;TP274+.5
A
1674-5124(2011)01-0010-03
2010-09-05;
2010-10-28
国家自然科学基金(50675222)
国家863高技术研究发展计划(2007AA04Z308)
福建省高校新世纪优秀人才支持计划(2007)
李文望(1966-),男,福建永春县人,教授,硕士,主要从事MEMS、静电纺丝的教学与研究。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
通信电源技术(2018年5期)2018-08-23
天津教育·下(2018年9期)2018-07-13
百科探秘·航空航天(2017年9期)2017-12-31
自动化仪表(2017年8期)2017-08-30
中国惯性技术学报(2017年1期)2017-06-09
山东工业技术(2016年15期)2016-12-01
照明工程学报(2016年3期)2016-06-01
通信电源技术(2016年4期)2016-04-04
自动化与仪表(2014年10期)2014-02-26
