
采用模糊控制的垂直型旋转式倒立摆系统
2011-03-16 07:41王春生侯云海刘凡
长春理工大学学报(自然科学版) 2011年2期
王春生,侯云海,刘凡
(1.长春市政沥青混凝土有限公司,长春 130123;2.长春工业大学,长春 130012)
在自动控制系统中,以倒立摆为控制对象的自动调节系统因组成结构简单、控制方法便于调整验证、控制性能和结果直观,特别可以直接地模拟机器人关节控制、火箭发射架姿态控制、航空飞行器的陀螺平衡控制等过程,故作为一种时变的非线性控制对象,在进行控制方法和有效验证各种新型理论的应用研究上,作为基础试验模型常被采用。例如为之开发的单支点直线倒立摆;双支点小车倒立摆;单级、二级直线倒立摆;单级、多级旋转倒立摆等。因倒立摆系统是一个典型的时变非线性系统,故对此所采取的理论研究和控制方法研究也比较多,一般对单支点系统,多在平衡点附近线性化,之后采用线性控制理论方法进行系统设计与控制的研究。但随着自动控制系统中被控对象复杂程度的加深,很难建立起被控对象的精确的数学模型,因此传统的控制方法很难满足现代化需要,而模糊控制、人工智能神经网络是解决这类问题的有效工具,也是目前应用研究的主流和热点[1-3]。
采用步进电机驱动平衡臂,通过平衡臂的旋转、摆动控制思想做成了一个单支点垂直型旋转式倒立摆的系统模型。以倒立摆的回转角、角变化率为控制输入量,采用模糊决策控制方法,通过调节旋转臂的转速、转向,即电机的转矩、转向实现倒立摆的控制。
1 倒立摆的动力学模型
图1是本系统制作的单支点旋转式倒立摆的示意图。采用步进电机作为旋转系统的控制执行元件,旋转臂通过滑环与电机轴固定联接,其中一端安装有光电编码器实现位移检测,倒立摆通过轴承与固定在旋转臂上的光电编码器联接。通过检测倒立摆的转角位移及转角变化率,经过控制系统的模糊控制规律判决,输出电机的控制信号,调节电机的旋转速度、方向和角度,从而实现了倒立摆的平衡控制。
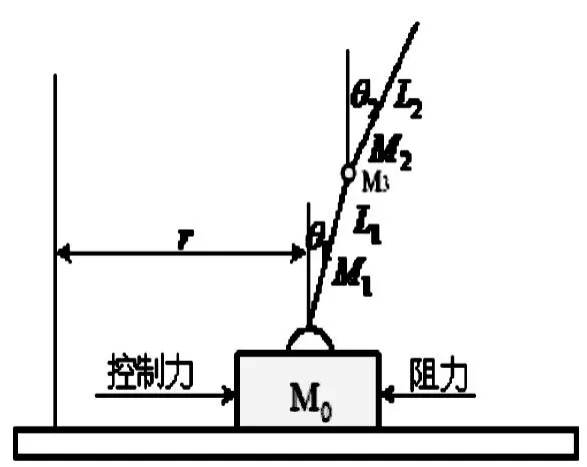
图1 旋转倒立摆示意图Fig.1 Diagram of verticalrotary inverted pendulum
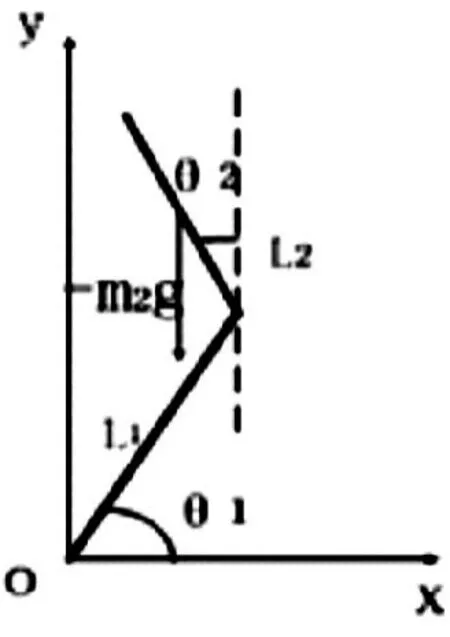
图2 基本坐标系Fig.2 The basic reference frame
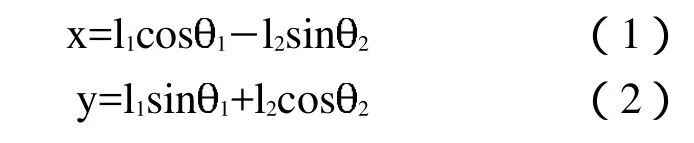
为推导倒立摆系统的运动状态及动力学模型,取电机旋转轴为坐标原点,水平面内取 x,y轴,假定电机及倒立摆逆时针旋转为转角的正方向,如图2所示。系统具有两个自由度,选取1,2为广义坐标,则在任意时刻,倒立摆重心位置的坐标可用下式来描述。
系统的动能K可表示如下:

选取摆、臂在垂直位置为零势能位置,则系统的势能为:

把(3),(4)式代入拉格朗日方程[4]

可得系统的运动方程式:
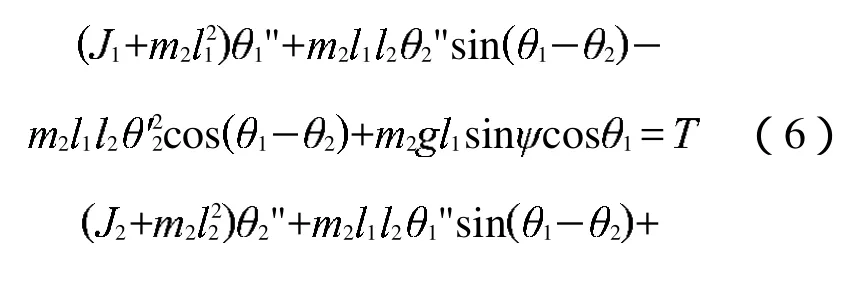

由运动方程可知,此系统是一个多变量、高阶次、非线性的复杂系统。假设倒立摆的摆动幅度很小,可认为且忽略高相,则式(6),(7)可化为:


对(10)、(11)两式进行拉普拉斯变换可得:
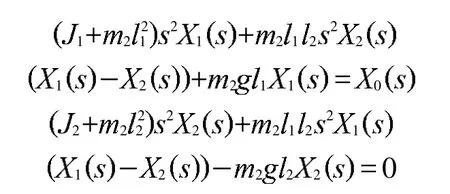
由上式可知,整理后的传递函数非常繁琐,因此本设计采用模糊控制法。
2 图形建模与仿真
为便于构图,将式(10)、(11)改写为下列形式:

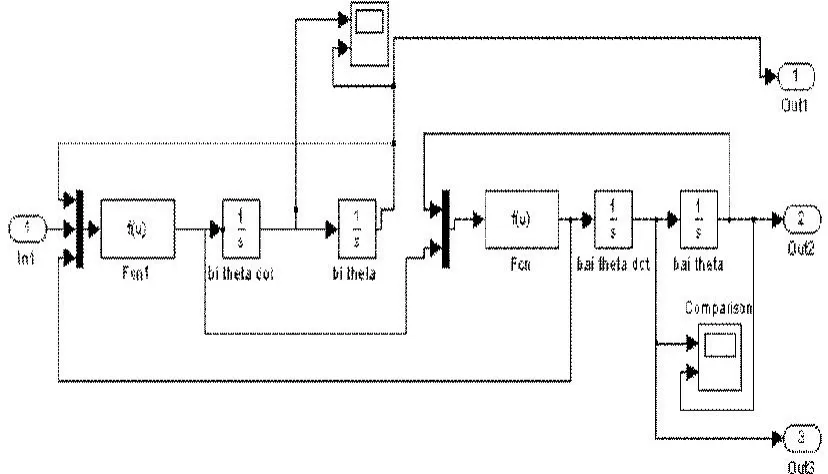
图3 倒立摆的动力模型仿真结构图Fig.3 The simulation frame of dynamic model for inverted pendulum
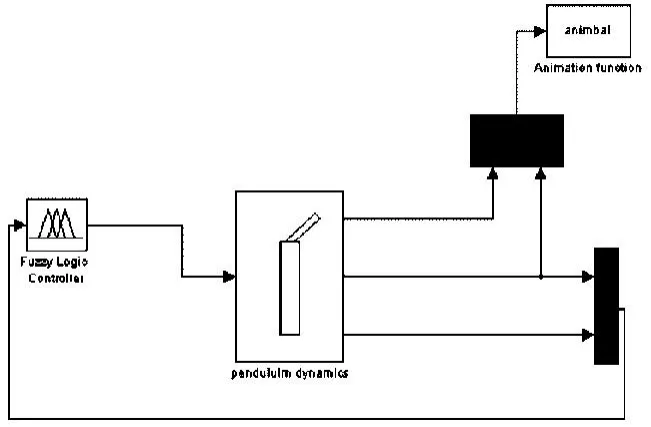
图4 倒立摆模糊控制系统模型Fig.4 The model of fuzzy control systemfor inverted pendulum
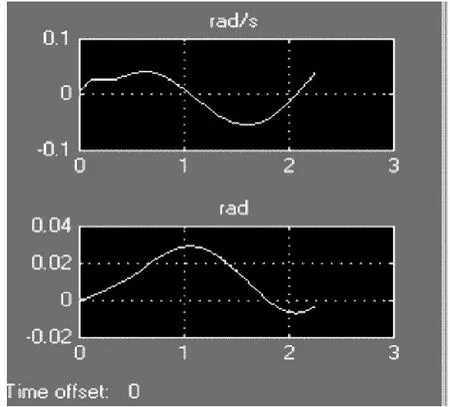
图5 平衡臂的仿真结果Fig.5 The simulation result of balance arm
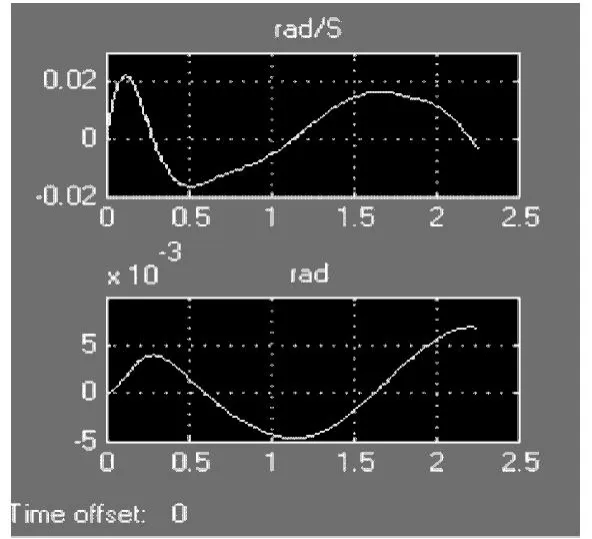
图6 摆的仿真结果Fig.6 The simulation result of pendulum

根据(12)、(13)两式,在 MATLAB中画出仿真结构图如图3所示。
利用模糊逻辑控制块及图3,可得出倒立摆模糊控制系统模型,如图4所示。其中图3为图4中"pendulum dynamics"的子系统,其"animbai"为摆的仿真函数[5]。
图3,4是在Simulink环境下,应用S函数及模糊逻辑工具箱产生的模糊逻辑控制块,针对系统运动状态空间方程建立的倒立摆模糊控制系统模型[6]。由图3,4得仿真结果如下图5,6所示。
由仿真结果可知摆能够在小角度范围内稳定摆动,实现了对摆的控制。
4 结论
本文基于拉格朗日动力学分析方法,推导出倒立摆的运动方程。在对系统进行可行的近似化处理后,给出了便于实现的简化控制关系模型。以倒立摆的回转角,角变化率为控制输入量,采用模糊控制方法实现了倒立摆的平衡控制规律。并通过MATLAB仿真实验确认了该控制方法的可行性。不但初步解决了倒立摆非线性系统的控制问题,同时也可应用到多级双支点倒立摆的控制系统中。
[1]哈尔滨工业大学理论力学教研组.理论力学[M].北京:高等教育出版社,2003.
[2]杨振强,程树康,朴营国.二级倒立摆的递阶模糊神经网络控制[J].电机与控制学报,2002,6(3):246-248.
[3]刘妹琴,廖晓听,陈际达,等.用进化RBF神经网络控制二级倒立摆[J].控制理论与应用,2008,12(4):593-596,600.
[4]Chih-Min Lin,Yi-Jen Mon.Decoupling Control by Hierarchical Fuzzy Sliding-Mode Controller[J].IEEE Trans.on control systems technology,2005,13(4):593-598.
[5]闻心,周露.MATLAB模糊逻辑工具箱的应用和设计[M].北京:科学出版社,2001.1
[6]冯冬青,谢宋和.模糊智能控制[M].北京:化学工业出版社,2000:95-100.
猜你喜欢
科学家(2022年3期)2022-04-11
数学大王·低年级(2021年2期)2021-02-21
小学阅读指南·低年级版(2020年11期)2020-11-16
现代装饰(2018年3期)2018-05-22
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
中国教育技术装备(2015年21期)2015-03-11
应用化工(2014年11期)2014-08-16
