基于目标特征信息的航迹处理
2011-06-28 03:04张发兵沈洪宁
舰船电子对抗 2011年6期
张发兵,沈洪宁,李 敬,洪 伟
(1.江苏科技大学,镇江212003;2.船舶重工集团公司723所,扬州225001)
0 引 言
航迹处理[1,2,3]的目的是将无序的点迹数据关联成航迹,为控制系统建立目标引导。航迹处理要求目标快速准确地建航和维持低的虚警概率。然而这是一个相互矛盾的过程,尤其是在复杂背景条件下,如果波门门限放宽,往往会出现虚警航迹过多,直接影响真实航迹起批。如果门限过小,虚警航迹减少,但真实航迹起始也困难,且不稳定,容易断航。为解决这一问题,对航迹处理在坐标系的使用、滤波模型、关联方式以及各种变换等方面进行了深入的研究,但效果并不明显。
对航迹处理来说无论使用哪种方法,输入的传感器参数只有距离、方位和仰角,无论是一种或多种方法组合都是对这几个参数的误差比较,对点迹的选取比较都是相对的,只是在比较单位上有所变化而已,尤其在工程实现上,除了系统误差还有工程实现时带来的随机误差,这些都会导致理论模型在工程实践上并不实用。最好的办法是从目标特性入手,提取更多的目标信息,为航迹的起始和维持提供更充分的证据。
本文根据工程实践的经验,从点迹提取入手,对目标特性进行分析,提取更多的目标信息,为航迹处理提供依据。
1 目标特征信息提取
目标回波波形携带了与目标密切相关的信息,而这种目标特征信息很难直观地表示出目标与特征的对应关系,但可以利用参数方法对目标进行分析。比较常用的回波特征信息包括动态过程中呈现渐变或者相对稳定的状态特征,还有在时间上变化的特性以及显著的特征信息[4]。这些稳态特征参数信息主要有:目标回波个数、目标回波幅度、目标分裂度等。
1.1 回波个数
对于机械扫描雷达,天线匀速扫描,扫描到目标时接收到脉冲的回波个数,通过过门限提取可以得到该参数。具体实现是应用滑窗检测器在同一距离单元上从检测器输出超过第2门限的回波起始到回到第2门限之下的回波终止,输出这段期间内的回波个数n。公式(1)反映了目标回波个数与目标距离以及目标尺寸的关系:

式中:θ0.5为半功率点波瓣宽度;Ωa为天线转速;fr为脉冲重复频率为点目标产生的脉冲积累数;RRCS为目标的尺寸;Km为一个线性函数。
从公式(1)可以看出目标的回波个数是1个稳态参数,尤其对静止的地物杂波,回波个数相对稳定,不会出现大的跳跃。实际测试对运动目标像飞机等由于其起伏特性和自身运动,回波个数不是很稳定,即使不稳定,其回波个数的变化也是相对的,具有一定的稳态性。
图1为某次对空测试录到的点迹数据图,波门内的目标是民航飞机,图2为民航飞机回波个数随时间变化的分布图,方差为7.859 1。
图3为某次测试地物目标录到的点迹数据图,图4为波门内的地物目标回波个数随时间变化的分布图,方差为1.256 2。从图2可以看出,即使目标有起伏和角闪烁特性,其回波个数的变化还是稳态的。而对岛屿等地物目标,其回波个数比较稳定,这对航迹处理时剔除地物杂波点、降低航迹虚警率很有效果。
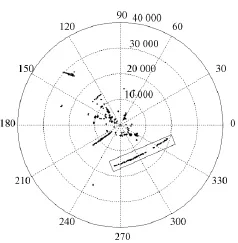
图1 对空点迹数据图

图2 飞机的回波个数随时间的变化关系
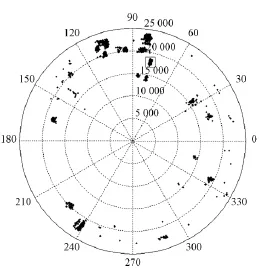
图3 地物点迹数据图

图4 地物的回波个数随时间的变化关系
1.2 回波幅度
雷达运动目标回波的强弱主要取决于雷达散射截面积(RCS)σ的大小。目标波形峰值与形状可以反映目标的回波幅度和目标RCS值的特性。目标回波的幅度是1个复杂函数,主要涉及2个方面:
(1)与雷达探测的关系,如雷达站位置、发射功率、天线增益、天线转速、脉冲重频和水平/垂直波束形状等;
(2)与动目标散射特性的关系,运动目标散射回波本身就是频率、极化、时间和姿态的复杂函数。
回波幅度是1个渐变的数值,在目标距离雷达越来越远时,回波能量相对原来越小。对静止的地物杂波而言,回波幅度的变化是比较平稳的,不会有太大的突跳。而对像飞机、导弹等运动目标,由于其具有闪烁特性和起伏特性,它的回波幅度具有不均匀和稳定变化的特点。图5和图6分别为飞机的回波幅度分布图和地物的回波幅度分布图。

图5 飞机的回波幅度随时间的变化关系

图6 地物的回波幅度随时间的变化关系
比较图5和图6可得,飞机的回波幅度变化比较明显,方差为281.990 0,而地物的回波幅度相对而言比较平稳,方差为9.869 8,通过分析回波幅度对航迹处理时剔除地物杂波点,可以有效地降低航迹虚警率。
1.3 分裂度
从雷达数据处理要求的角度来说,人们希望1个点只有1组点迹数据,但实际上雷达录取的单个目标点迹数据为多组,在距离上和方位上都不是单值,产生了目标分裂,因而影响了对目标实际位置的估计。目标的分裂度主要是针对点迹提取时点迹的凝聚而言的,虽然目标分裂对点迹数据提取造成了困难,但另一方面却也反应了目标的尺寸和大小。
对于运动目标来说,由于目标运动形成的附加相位项导致目标距离像的游动,游动量的大小和目标的运动速度成正比,这样一个占据多个距离分辨单元的目标的一维距离像将分布于一次综合波形的两端,在距离上分成2个目标,即为“目标分裂”现象,这种现象在目标的尺寸比较大,其散射点分布在几个连续的不模糊距离窗内时的危害更大。
除此之外,动目标检测(MTD)处理时,对快速傅里叶(FFT)点数比较少、频域分辨率不够的情况,目标出现切向运动时,滤波通道位置会比较模糊,处理不好就不是稳态参数了。
2 航迹相关与处理
前面介绍了一些目标新的特征参数的提取,将这些特征参数[5]用在航迹相关上可以改善航迹处理的情况,大大降低航迹虚警率,提高航迹起始速度和航迹处理质量。
进行航迹处理时,首先对点迹目标进行常规相关,即对航迹目标位置(包括距离、方位、仰角)相关,然后在此基础上增加目标特征信息的相关,包括回波个数相关、回波幅度相关等,这些相关对航迹经过杂波密集区和出现大的机动时,会有很大改善。
2.1 回波个数的相关准则
在进行回波个数相关匹配时遵循的原则是设K-1时刻某目标的回波个数为f(k-1),K时刻某目标的回波个数为f(k),目标相邻时刻的回波个数差为,若满足2 M<f(k),则近似认为是同一批目标或者同类目标,
2.2 回波幅度的相关准则
设K-1时刻某目标的回波幅度为f(k-1),K时刻某目标的回波幅度为f(k),目标相邻时刻的回波幅度差为,由于回波幅度与目标距离相关,则假设K-1时刻的目标位置距离为Sk-1,K时刻的目标位置距离为Sk,R = (Sk-Sk-1)4,由:

则当满足MR>2(1-R)2时,近似满足2 M<f(k),认为2点属于同类目标。
进行航迹处理时,首先进行航迹分类,即将航迹按真实性的大小分成3类:
第1类:确认航迹(即可靠性航迹),已判定为真实目标的航迹;
第2类:非确认航迹,新建航迹或未判定为真实性航迹的航迹;
第3类:自由点迹,上一个天线周期内没有被录用的点迹。
3 结果分析
对以上3类航迹,在相关顺序上首先为确认航迹进行初始相关和特征信息相关,即点迹的录用优先权首先是确认航迹,然后是对非确认航迹的初始相关和特征信息相关,最后是自由点迹的自由相关。对确认航迹和非确认航迹首先进行常规相关,当相关波门内录到的点迹不止1个时,就要考虑特征信息参数,通过最优匹配找到最相关的点迹。自由点相关时,起始航迹后要进行特征信息相关,以避免虚警航迹的起始[6]。
图7是未用参考特征信息进行的航迹处理,图8是参考特征信息后进行的航迹处理。
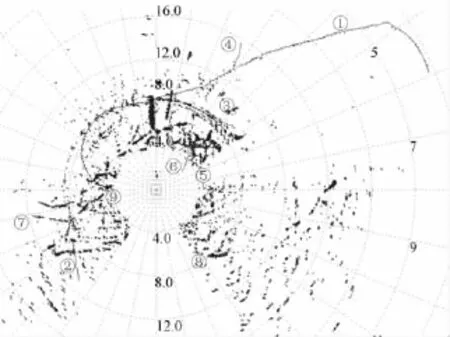
图7 常规航迹相关
图中,未用参考特征信息进行的航迹处理有9条可能航迹(包括虚假航迹和真实航迹,标号①到⑨),而用参考特征信息后进行的航迹处理的航迹只有一条真实航迹(标号①),从图7和图8可以看出图8加入了特征参数信息的相关,航迹虚警明显减少,而且航迹起始较快,具有较好的工程应用前景。

图8 加入特征信息的航迹相关
4 结束语
本文采取的是用提取目标特征的增值信息来进行航迹处理,这些特征参数用在航迹相关上可以大大降低航迹虚警率,提高航迹起始速度和航迹处理质量。仿真实验表明:该方法不仅有效地减少了计算量和计算时间,而且减少了虚假航迹的占有率,保证了航迹的质量,运算实时性显著提高,具有较好的工程应用前景。
[1]何友,修建娟.雷达数据处理及应用[M].北京:电子工业出版社,2006.
[2]丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,2006.
[3]邹津,权太范.雷达航迹处理研究[J].无线电工程,1992,22(4):20-26.
[4]唐自力,马彩文.基于航迹和特征的目标识别技术在多目标跟 踪 中 的 应 用 [J].光 子 学 报,2010,39(2):375-378.
[5]李正周,彭素静.基于假设检验的小弱运动目标航迹起始[J].光子学报,2008,37(3):613-617.
[6]李钢,李霄九,张仁斌.TWS雷达航迹跟踪仿真系统研究与设 计 [J].合 肥 工 业 大 学 学 报,2008,31(5):721-723.
猜你喜欢
股市动态分析(2021年25期)2021-12-30
小学生学习指导(低年级)(2021年9期)2021-10-14
青年歌声(2019年12期)2019-12-17
中学生数理化·七年级数学人教版(2019年10期)2019-11-25
小学生学习指导(低年级)(2019年9期)2019-09-25
小学生学习指导(低年级)(2018年9期)2018-09-26
宇航计测技术(2018年3期)2018-09-08
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
舰船科学技术(2015年8期)2015-02-27