
板簧导向的单缸结晶器振动装置的分析与设计
2011-11-11 01:33许增学李新强梁子福王国啸
重型机械 2011年6期
蒋 军,许增学,李新强,梁子福,王国啸,郝 瑾
(1.中国重型机械研究院有限公司,陕西 西安 710032;2.中冶陕压重工设备有限公司,陕西 西安 710119)
1 概述
近几年,单缸结晶器液压振动装置在断面为200方、200圆及其以下的连铸机中得到了广泛的用途,其主要优点是:同步性能优于双缸振动;振频、振幅在线可调;实现正弦及非正弦振动;机械磨损极小,易于备件管理;维护工作简单,工作量小。
本文从该装置的动力学模型出发,通过机构分析,推导出该装置导向机构的设计方法。
1.1 振动系统的组成
如图1所示,该装置的振动系统是由两套反向四连杆机构ABCD 和A′B′C′D′构成,连杆 AB、A′B′、CD、C′D′是板弹簧,连杆 BC、B′C′为公共连杆即结晶器振动台。其与机架的连接(AD A′D′)可以理解为插入端,与连杆(BC B′C′)的连接可滑动且通过弹性销定位,可理解为弹性铰链连接。在激振力(液压缸)驱动振动体时,两套四连杆机构共同作用,得到曲率半径接近连铸机圆弧的运动曲线。
1.2 振动动力学模型分析
在以上系统中,如果暂且去掉一套四连杆机构,并把杆件的连接均看成是铰链,系统就转化为图2所示的振动机构,即为特殊的弹性连杆式振动系统。其中,连杆BC是振动体;油缸是驱动器,通过弹性连杆(刚度k0)激振;缓冲弹簧(刚度k1),用于支撑振动台和结晶器的质量,以减少驱动力的波动;AB、CD是导向连杆。称其特殊在于AB杆和CD杆转向相反,使振动体作一般平面运动,适当拟订机构尺寸和位置,该运动可接近于结晶器振动所要求的圆弧半径和轨迹。
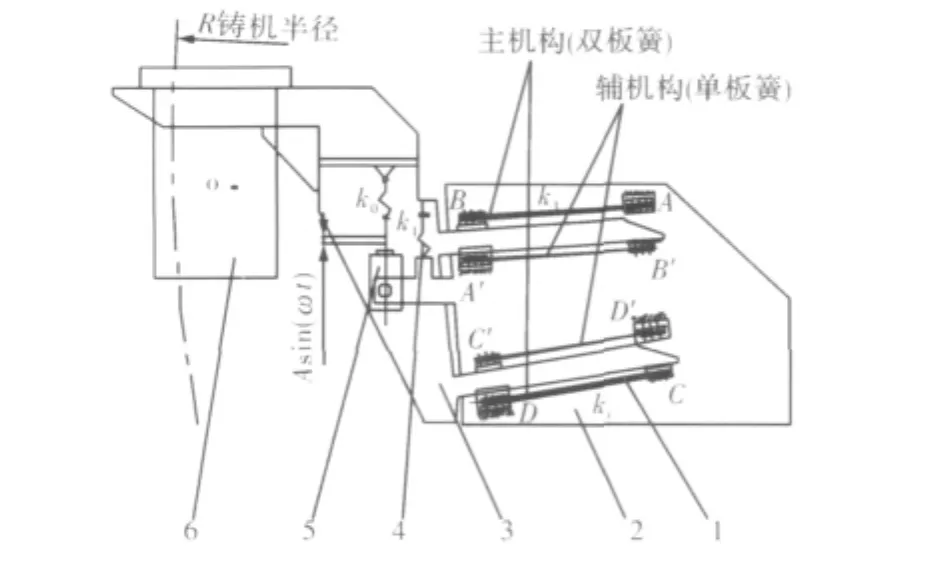
图1 两套反向四连杆机构振动系统Fig.1 Vibrating system for two sets of reverse direction four-bar mechanisms
当用一套主机构双板簧时,在结晶器振动中由于板弹簧不是两端铰接杆,在导向的同时其弯曲变形会产生两个副作用:一是使振动体的运动失真,二是在B,C两个铰接点产生附加力。因此,必须用另一套机构去平衡其副作用,且两套机构的相互作用还为运动轨迹的调整提供了手段。
图2 弹性连杆式振动系统Fig.2 Vibrating system with elasticity connecting rods
在振动中两组板弹簧端点(B,C)的受力方向和运动方向基本相同,在动力学模型中可将其处理为两根导向的铰链杆和一个弹性反力nki(n是板弹簧的数量,ki是按照插入端悬臂梁弯曲变形计算的刚度,ki=3EI/l3,符号意义见后)。插入端的受力与振动无关。
作为公共连杆的结晶器振动台,其运动可归结为质心的平动和绕质心转动的合成。因为振幅对应的转角极小而忽略转动,就可以把质心圆弧振动的切线方向认定为动力模型的振动方向,在这个方向上激振时,振动体上任何一点都在该点同心圆弧的切线上运动。由于导向机构兼备力和力偶平衡的作用,即使激振力不通过质心也不会影响振动模型的运动性质和振动轨迹,而只是对(动态静)力平衡关系有影响。
2 动力学分析
2.1 系统动力学分析
经过上述分析得到的动力学模型如图3所示,属于单自由度受迫振动系统,其微分方程如下:
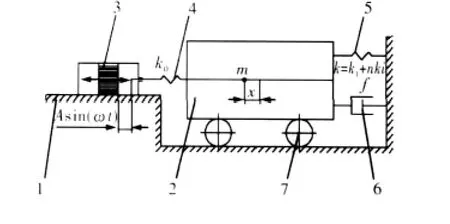
图3 动力学模型Fig.3 Kinetics model

在振动装置双振幅范围内各弹簧(k0、k1、ki)必须处于压缩状态,以保证系统不出现间隙和跳动;结晶器满载钢水,振动装置静止时应该处于振动轨迹的中心位。
微分方程(1)的特解为
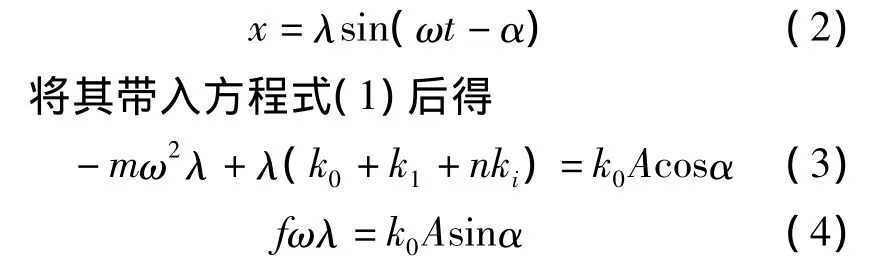
式中,λ为振动体的振幅;α为振动体的振动响应相对于激振力p=Ak0sin(ωt)的滞后角。
由上式解出结晶器的振幅响应和滞后角的计算公式
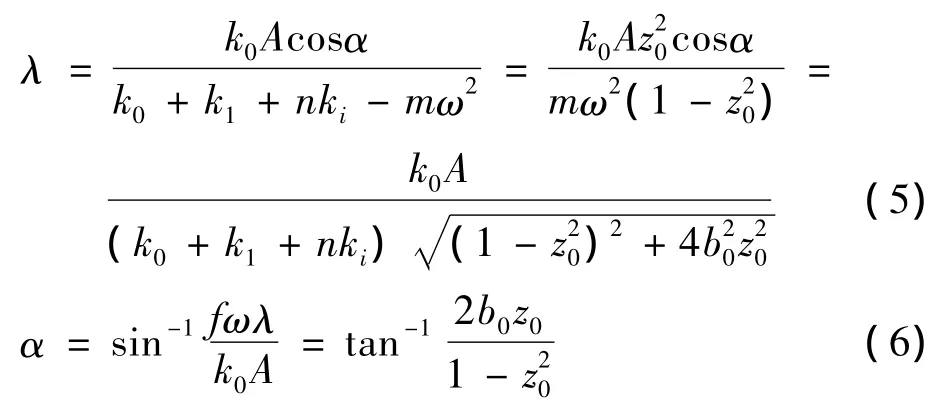
式中,ω0为系统的固有频率,ω0=为频率比,z=ω/ω;b为系000统阻尼比,b0=f/2mω0。
系统的频率比和阻尼比对振动系统的工作品质影响极大,必须正确设定。根据经验,结晶器振动中通常在亚临界范围工作,取频率比z0=0.5~0.7,使其在参振质量等工况变化时有较稳定的振幅且不发生共振;初步设计时取阻尼比b0=0.3~0.5,在这样的参数范围下系统有一定的振幅放大效果,设计完成后应根据实际情况对系统参数进行调整。
2.2 激振油缸的主参数
从振动响应式(5)和式(6)中整理出油缸应输出的振幅A和所需的推力P为
油缸的激振力克服振动体的惯性力和阻尼力,并受频率比的很大影响。为适应生产中的各种情况,名义推力应留有足够的裕量。
3 振动系统的动态静力分析
3.1 振动体力平衡方程式及求解
如图4所示,以振动体的中间位置向上运动的瞬间为受力分析模型,取振动体为分离体,其上的作用力有振动的质量Q,连杆弹簧的作用力F0,缓冲弹簧的反力F1,各板簧悬臂端的横向反力Fi,板弹簧受拉而产生的轴向力Pi。
(1)机构对称,可认为两侧导向机构的力都集中到中间平面上;
(2)与作用力对应的圆心角α很小,平面力系的各力只作用在激振力方向(y轴)或与之垂直的方向(x轴);
(3)忽略阻尼力。
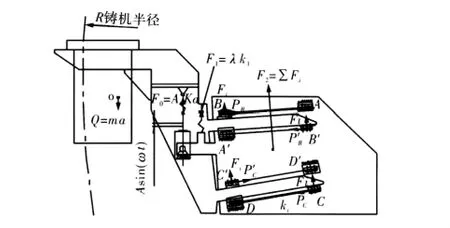
图4 振动体受力模型Fig.4 Load-carrying model of vibrating body
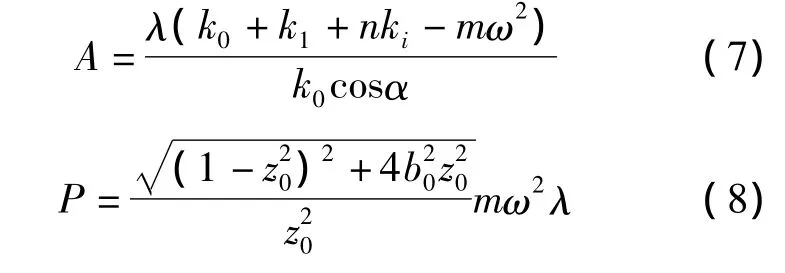
振动台的力平衡方程式为
式中:F2为所有板簧悬臂端横向力的等效力(F2=∑Fi),作用线通过板弹簧横向力的合力作用点与激振力平行;PB、PB′为弹簧力,从变形协调条件知,所有板簧的伸长基本相同,其轴力也相同,即 PB=2PB′,Pc=2Pc′;F1为振动体静止时缓冲弹簧的支撑力;li为各力作用线到O点的垂直距离;a为振动体加速度。
PB与 PC,PB′与 PC′是两对绝对值相等方向相反的力,可去掉这个恒等式,式(9)中剩下两个方程式可求解F0和PB两个未知力。
由上式看出,重心到激振油缸的距离l0对系统平衡影响很大,应尽可能取得小一些,最好为零,即激振力的方向通过振动体质心。
3.2 板弹簧的变形反力
将图4中板簧DC的变形情况放大如图5,图中DC0、DC′、DC分别是板弹簧的初始状态、自由端受力的挠曲线、完成导向后的挠曲线。C0点和C点都在连铸机的圆弧上,弦长Δh由设计确定(应大于最大的单振幅),相应的水平位移用下式近视计算

式中,ΔR为由C0点到C点连铸机圆弧的水平(x轴方向)位移;R'为外弧在半径为R的圆弧上振动时C0所处的半径。
图5 板簧受力变形图Fig.5 Load-carrying deformation of laminated spring

式中,Δl′为C′点相对于C0点的水平位移;l为板簧的长度。
板簧的弹性伸长量Δl是以上两项水平位移之代数和。

显然板簧的断面较大,不能设想使板簧产生轴向伸长,只能在其连接点处设置弹性元件来完成变形任务。Δl是设计弹性元件的依据,弹性元件设计以后再算出各轴向拉力Pi。
板弹簧悬臂端横向力Fi由下式计算

式中,E为钢材的弹性模量;I为板簧断面的惯性矩,I=ab3/12;a、b分别为宽度和厚度;ki为板弹簧对端点挠度的刚度。
其余符号的物理意义同前。
4 弹性销的计算
4.1 建立力学模型
板弹簧的悬臂端采用松螺栓,弹性销轴受径向力的形式联接,以便利用弹性销的变形补偿制造误差和杆件必要的伸长。如图6所示,弹性销在力P1、P2的作用下产生变形,使得连接件双方沿径向移动e1、e2,相当于杆件伸长(e1+e2)。
由于弹性销与连接件双方的孔存在间隙,只能在K1,K2点附近接触,端面A-A不发生变形,因此其力学模型相当两个90°圆的等断面曲梁,一端(A-A)插入,一端(K1,K2)受横向力作用产生挠度Δl,Δl与杆件伸长的关系e1=e2=Δl/4。危险断面是A-A,应进行强度计算。
4.2 挠度计算
弹性销为矩形断面(轴剖面),作为曲杆的中性层曲率半径R用下式计算。

图6 弹性销受力变形图Fig.6
式中,h为弹性销的厚度;R1、R2为分别为外、内半径。
插入端的悬臂曲杆(矩形断面)在端点受横向集中载荷作用时载荷与挠度的关系式如下

式中,E为钢材的弹性模量;A为弹性销作为曲杆的断面积,A=bh;b为弹性销的长度;e为曲杆(弹性销)断面几何中心到中性层之间的距离
Δl为板弹簧伸长量。
可以看出曲杆几何尺寸和材质确定以后载荷与伸长是线性关系,算子m为比值。

4.3 强度校核
4.3.1 弯曲强度
弹性销作为曲杆,最大弯曲应力发生在外表面的切向,其计算公式为

式中,M为最大弯矩,表达式为M=PR0;y为计算点到中性层的距离,y=0.5h+e;S为曲杆断面积的静矩,S=Ae;ρ为计算点的弯曲半径,ρ=R1;K为载荷系数;[σb]为弹性销的许用弯曲应力。
4.3.2 抗剪强度

式中,[τ]为弹性销的许用剪应力。
4.4 正确装配弹性销
如果设想将板弹簧与振动座的夹紧螺栓拧紧成为紧螺栓联接,弹性销不起长度补偿作用,只能使板簧伸长,拉伸力为

由式(16)、式(20)得到两种补偿设计所需轴力之比,即
例如,板簧尺寸10×140×940,弹性销16×3×50代入式(21)的比值是11。所以板簧与弹簧座采用松螺栓联接,可以减小附加的板簧拉力和系统阻力。
5 弹性连杆计算
弹性连杆应满足的刚度,由下式计算

式中,m为振动体的质量;ω0为系统固有频率;k1、ki、n分别为缓冲弹簧刚度、一根板弹簧的横向刚度、板弹簧数量。
6 振动系统设计
6.1 设计前提条件
(1)连铸机的铸坯断面、圆弧半径、结晶器振幅等参数已经确定;
(2)结晶器的设计方案已完成,可以提供布置振动机构的空间、位置及尺寸;
(3)振动体(振动台、结晶器)的质量已初步确定。
6.2 振动系统方案设计
(1)在铸机提供的条件下设计振动和导向机构的运动简图;
(2)按轨迹设计两套四杆机构,并使其在轨迹利用段上达到精度要求,建议用作图法、实验法设计,用轨迹上关键点的坐标进行校核;
(3)确定激振油缸、缓冲弹簧布置的方向和位置。
6.3 动力学计算
(1)根据经验和本机的特点确定几个关键参数:Z0、b、Δh、Δl(最大值)、板簧断面(l、s、m、k);
(2)动力学计算得出k1、k0、A、P;
(3)校核油缸能力参数。
6.4 主要元件设计
(1)按k0设计弹性连杆;
(2)按k1设计缓冲弹簧;
(3)按Δl及其组成选择弹性销,并进行杆长补偿计算和强度校核。
6.5 完成结构设计。
7 结论
与传统的短臂连杆式振动装置相比,由于本装置采用了全板弹簧导向、液压缸振动的设计思路,因此克服了前者维修量大、存在机械磨损、不能实现非正弦振动等缺点。本装置一次调整好后,只需在线定期更换油缸即可满足生产,一般在2年内振动装置不需下线更换。采用本装置,能显著提高铸坯表面质量,减轻检修工作量,已成为目前新建连铸机、旧连铸机改造的必选设备之一。
[1] 刘名延,李平.板坯连铸机设计与计算[M].北京:机械工业出版社,1990.
[2] 成大先,王德夫.机械设计手册[M].北京:化学工业出版社,1992.
[3] 刘延柱,陈文良,陈立群.振动力学[M].北京:高等教育出版社,1998.
猜你喜欢
山东冶金(2022年2期)2022-08-08
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年2期)2020-12-14
山东理工大学学报(自然科学版)(2019年1期)2019-12-11
重型机械(2019年3期)2019-08-27
汽车实用技术(2017年24期)2018-01-24
汽车实用技术(2017年22期)2017-12-11
汽车实用技术(2017年16期)2017-09-21
汽车实用技术(2015年8期)2015-12-26
燕山大学学报(2015年4期)2015-12-25
