
基于MATLAB转子绕线机控制系统调节器的仿真研究
2012-01-04 07:58季丽丽
沈阳大学学报(自然科学版) 2012年1期
季丽丽,马 骥
(沈阳大学信息工程学院,辽宁 沈阳 110044)
基于MATLAB转子绕线机控制系统调节器的仿真研究
季丽丽,马 骥
(沈阳大学信息工程学院,辽宁 沈阳 110044)
利用MATLAB软件的Simulink仿真平台,对转子绕线机控制系统进行数学建模和系统仿真,并结合Bode图进行分析研究,确定调节系统的控制器参数,从而获得理想的设计结果.通过对其进行仿真研究,验证了设计的可行性.
控制器;直流调速系统;超前校正;仿真;Simulink;Bode图
在现代化工业中,转子绕线机控制系统的应用日益广泛.转子绕线机控制系统调节器的控制功能是通过直流调速系统来实现的.绕线机系统是一种特殊的直流调速系统.传统的PID直流调速系统[1]基本上由比例调节器、微分调节器和积分调节器组成.此次设计采用一种新的调节器,来完成该控制器参数的调节和确定.采用Bode图法和Simulink系统仿真对系统的稳定性进行进一步的分析、判断[2],最终得到适当的控制器以实现转子绕线机的正常工作.
1 转子绕线机控制系统的结构
转子绕线机控制系统实质就是用机器代替手工操作,为小型电机的转子缠绕铜线.每个小型电机都有3个独立的绕圈,线圈上面需要缠绕几百圈铜线.绕线机用直流电机来缠绕铜线,它应该能快速准确地绕线,并使线圈连贯坚固.采用自动绕线机后,操作人员只需从事插入空的转子、按下启动按钮和取下绕线圈子等简单操作.绕线机控制系统如图1所示.控制系统的控制器通常采用比例-微分-积分等基本控制规律,以及这些基本控制规律的组合,如比例-微分、比例-积分、比例-积分-微分,来实现对被控对象的控制[3].通过对转子绕线机控制系统的结构分析得到其系统框图,如图2所示.

图1 转子绕线机控制系统图Fig.1 Diagram of rotor winding machine control system
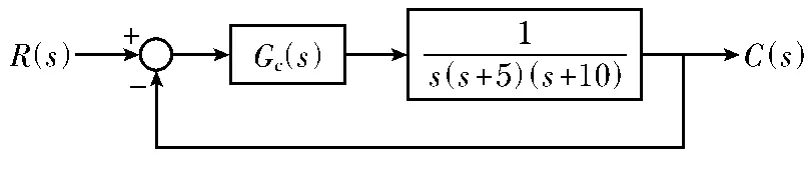
图2 转子绕线机控制系统框图Fig.2 Block diagram of rotor winding machine control system
由图2可看出该系统至少是个I型系统.由于绕线电机及测速器的特性不可以改变,所以只有通过设计适当的控制器来实现转子绕线机的正常工作.自动控制系统中,控制器的设计又叫做系统的综合与校正.
2 控制器设计
Gc(s)控制器设计的主要设计参数如下:
(1)系统对阶跃输入响应的稳态误差ess<10%,静态速度误差系数kv在10左右;
(2)系统对阶跃输入的超调量σ%在10%左右;
(3)按Δ=2%要求的系统调节时间ts<3 s.
2.1 理论分析
根据给定的设计要求以及有关的近似公式,可以给出本设计在频率域内的设计要求:


其中,|z|<|p|,a=(R1+R2)/R2>1 ,Τ=R1R2C/(R1+R2).通常,a称为分度系数,T叫做时间常数[4].,可以得出k1=500.
比例控制器实质上是一个具有可调增益的放大器.在信号变换过程中,PD控制器只改变信号增益而不影响其相位.若本系统中采用比例控制器Gc(s)=k1,则在此情况下,系统只有一个可调参数,即增益k1.为了迅速达到稳态响应,必须调整k1的取值,使系统主导极点对应的阻尼系数变成0.707,阶跃响应的超调量仅为10%左右.k1的取值越大,稳态误差ess越小,但增加k1的取值将对系统的瞬态响应产生不利的影响.当kv=10时,对系统进行Simulink仿真,仿真图如图3所示.此时系统输出响应的超调量高达64%,调节时间长达9 s,此时的结果不能满足设计需要.所以,单纯使用比例控制器难以达到设计要求,在这种情况下,尝试为系统引入超前校正网络:

图3 当k1取500时的仿真图Fig.3 Simulation diagram when k1 is 500
超前校正就是利用超前校正环节引入正的相移,增加系统的相位裕度,从而提高系统的动态性能.常用的超前校正环节有PD控制器和带惯性的PD控制器.因为采用PD控制器不利于抑制噪声,所以本次设计也可以看做带惯性的PD控制器的设计.
2.2 超前校正网络的设计
(1)绘制k=500时未校正系统的Bode图,如图4所示,并对其进行分析计算,得到相角裕度.截止频率ωc=5.715 4 rad/s,穿越频率ωg=7.071 1 rad/s,相角裕度γ=11.131°.

图4 待校正系统的Bode图Fig.4 Bode diagram of the system to be corrected
(2)由公式Φm=γ0-γ确定所需的附加超前相角Φm,其中,γ是校正前的相角裕度,γ0是校正后的相角裕度即φpm,所以Φm=48.869°.
(3)根据sinΦm=(a-1)/(a+1),计算校正网络参数a=7.14.
(4)计算10 lga,在未校正系统的Bode图上,确定与幅值增益-10 lga对应的频率ωm.
(5)在频率ωm附近绘制校正后的幅值增益渐近线,该渐近直线在ωm处与0 d B线相交,斜率等于未校正时的斜率加上20 d B/dec.确定了超前校正网络的零点z=3.5,再根据p=az,计算得到超前校正网络的极点p=25.所需的超前校正网络,其参数取值分别为z=3.5,p=25,k=1 800.于是有

3 控制器的仿真分析
转子绕线机控制系统的传递函数为

绘制校正后控制器的Bode图,如图5所示.用Simulink仿真[5]得到校正后系统的输出响应,如图6所示.

图5 校正后系统的Bode图Fig.5 Bode diagram of the corrected system
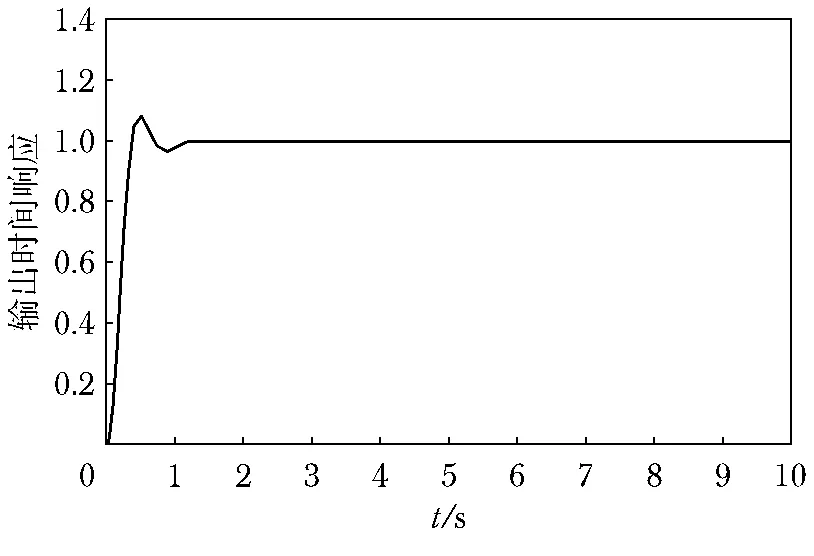
图6 系统的输出响应Fig.6 Output response of the system
由校正后的Bode图(图5)可以得到此时的相角裕度γ=59.196 1°,符合设计的要求.由图6可以看出,系统对阶跃输入的超调量σ%≈9.81%,接近10%,系统调节时间ts=1.4,小于3 s,而静态速度误差系数kv根据公式计算出约为5.04.
4 结 语
引入超前校正网络后,校正后的系统能满足对调节时间和超调量的设计要求,增大系统增益k,稳态误差会下降,并且补偿由超前校正网络带来的增益衰减(1-a),已有的结果表明超前校正网络已经明显地增加了系统的相角裕度,在抑制系统高频噪声的能力上优于PD控制器,提高了系统的相对稳定性和响应速度,改善了系统的瞬态性能.不足之处是稳态误差没能满足设计的要求,除此之外都满足了设计的需求,能够保证转子绕线控制系统很好地工作.
[1] 陈伯时.电力拖动自动控制系统[M].3版.北京:机械工业出版社,2004:75-87.
[2] 薛定宇.控制系统仿真与计算机辅助设计[M].北京:机械工业出版社,2005:34-39.
[3] 王立红,杨汇军.基于 Matlab直流调速系统设计与仿真[J].辽宁工学院学报,2004,24(1):8-9.
[4] 胡寿松.自动控制原理 [M].北京:科学出版社,2007:95-138.
[5] 赵景波.MATLAB控制系统仿真与设计[M].北京:机械工业出版社,2010:117-223.
Simulating Research of Rotor Winding Machine Control System Regulator based on MATLAB
JILili,MAJi
(College of Information Engineering,Shenyang University,Shenyang 110044,China)
The mathematical model was built and simulation of the rotor winding machine control system was done by Simulink platform in MATLAB.Combining with Bode diagram to analysis and design the system,the diagram of regulating system controller parameters were determined,so as to achieve the ideal design results.According to the simulation research,the feasibility of the design were verified.
controller;DC-speed control system;advanced correction;simulation;Simulink;Bode diagram
TM 921.5;TP 391.9
A
1008-9225(2012)01-0025-03
2011-09-03
季丽丽(1986-),女,辽宁大连人,沈阳大学硕士研究生;马 骥(1953-),男,河北抚宁人,沈阳大学教授,博士,硕士生导师、博士生副导师.
刘乃义】
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
电工技术学报(2021年9期)2021-05-12
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
电子制作(2018年1期)2018-04-04
西安工程大学学报(2016年2期)2016-06-05
电测与仪表(2016年2期)2016-04-12
电测与仪表(2016年6期)2016-04-11
核科学与工程(2015年2期)2015-09-26
电测与仪表(2015年5期)2015-04-09
