基于UG/Motion重型货车主副弹簧悬架动力学仿真分析系统的构建
2012-02-05 03:51侯永涛周孔亢陆建辉汪若尘
振动与冲击 2012年16期
侯永涛,周孔亢,陆建辉,汪若尘
(1.江苏大学 机械工程学院,镇江 212013;2.江苏大学 汽车与交通工程学院,镇江 212013)
基于UG/Motion重型货车主副弹簧悬架动力学仿真分析系统的构建
侯永涛1,周孔亢2,陆建辉2,汪若尘2
(1.江苏大学 机械工程学院,镇江 212013;2.江苏大学 汽车与交通工程学院,镇江 212013)
提出一种基于UG/Motion构建重型货车主副弹簧悬架动力学仿真分析系统的新方法,并应用该方法开发出了相应的软件原型系统。基于二自由度1/4车辆虚拟样机模型,原型系统的仿真分析模块可方便、快捷地实现虚拟样机模型主要设计参数的修改及基于谐波叠加法各种标准等级时域路面不平度的模拟生成。仿真分析模块通过调用UG/Motion集成的RecurDyn解算器来获取仿真分析结果,通过集成Matlab的绘图功能对分析结果进行输出查看;系统的遗传优化设计模块以整个载荷范围内悬挂质量加速度均方根值最小为目标函数,可对悬架的阻尼系数、主副弹簧刚度比和临界载荷比进行动力学优化。通过一个设计实例验证了原型系统构建的正确性及遗传优化设计模块的有效性。
重型货车;主副弹簧;非线性悬架;动力学分析
采用主副钢板弹簧的汽车悬架系统,因结构简单、制造成本低,在重型货车上得到了广泛应用。重型车辆的轮胎动载荷一直被认为是路面早期破坏的主要因素,尤其是车辆超速或超载时,将严重影响车辆的动力学性能,加剧作用于路面的动载荷,缩短路面的使用寿命[1]。因此,建立重型货车主副弹簧悬架的动力学仿真分析系统,优化悬架的结构参数对有效提高车辆的平顺性,降低对路面的损伤具有重要意义。
由于主副弹簧非线性悬架系统的广泛应用,国内外学者对其进行了广泛研究。唐应时等[2]应用非线性振动理论,给出了后悬架只有主弹簧单独工作和主副弹簧一起工作时悬架偏频的计算公式。Sungsoo等[3]提出了一种计算主副弹簧非线性刚度的方法,并对该方法的有效性进行了验证。Shokrieh等[4]采用有限元软件ANSYS对复合材料钢板弹簧进行了分析和优化,并与普通钢板弹簧进行了比较。目前,研究人员在对非线性悬架系统进行动力学仿真分析和结构参数优化时,多采用 Matlab 及 Simulink 构建其动力学模型[1,5-6]的方法,该方法的优点在于结构和流程清晰、计算效率高,缺点在于需要构建悬架系统复杂的动力学微分方程,且在面向应用方面显得很不方便。本文旨在提出一种基于UG/Motion,将多刚体动力学与遗传优化方法相结合研究分析主副弹簧非线性悬架动力学特性及优化悬架结构参数的新方法,并应用该方法开发出相应的软件原型系统,以方便实现悬架系统的动力学仿真分析及悬架结构参数优化设计。
1 原型系统的模型及构成
原型系统以1/4车辆悬架作为研究对象,应用UG的运动仿真(Motion)模块构建的二自由度振动虚拟样机模型,如图1所示。
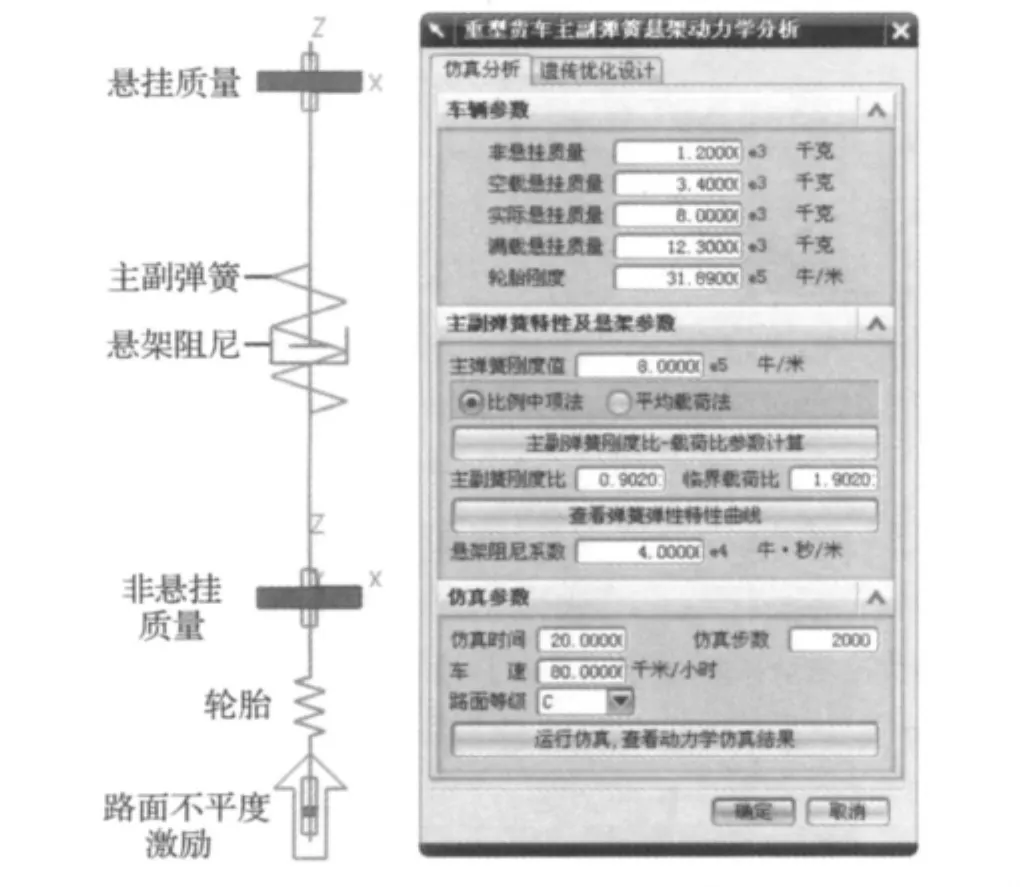
图1 1/4车辆虚拟样机模型及原型系统的主界面Fig.1 Virtual prototype model of quarter vehicle and main interface of the prototype system
原型系统以NX Open API为应用程序接口,采用Visual C++2005为开发平台构建。NX Open API提供了一系列函数用于实现动力学仿真模型的更改、仿真运行及仿真结果的获取。UG/Motion模块集成了MSC Adams和RecurDyn两种解算器,实验证明,对大多数机构来说,用这两种解算器求解出的结果基本相同。为降低原型系统构建的复杂程度,采用将Matlab的M程序通过mcc命令编译为可被主程序调用的动态链接库的方式,以集成Matlab的相应绘图功能,用于仿真结果的输出查看。
原型系统的主界面如图1所示,可以看出其主要由仿真分析和遗传优化设计两个功能模块组成。
2 仿真分析模块
原型系统的仿真分析模块主要用于车辆二自由度虚拟样机模型参数的修改、运行动力学仿真及仿真结果查看。
在二自由度1/4车辆的虚拟样机模型中,悬挂质量、非悬挂质量、轮胎刚度和悬架阻尼系数的修改相对比较简单。在NX Open中,结构体UF_MOTION_link_mass_properties_t的成员变量mass用于存储刚体的质量特性,在获取用户输入的非悬挂质量和实际悬挂质量后,调用函数UF_MOTION_set_link_mass_properties()即可对其进行修改;虚拟样机模型中,轮胎刚度和悬架阻尼都为常数,结构体UF_MOTION_spring_damper_t的成员变量spring_rate用于存储线性弹簧的刚度系数,damping_rate用于存储线性阻尼系数,在获取用户输入后,调用函数UF_MOTION_set_spring()即可对其进行修改。
2.1 主副弹簧弹性特性数据的确定
安装有主副弹簧的悬架系统,其弹性特性曲线如图2所示。在 UG/Motion中,非线性弹簧的弹性特性通过表(XY)函数存储在辅助数据文件(AFU)的相应记录(Record)中。对于数据类型为刚度的记录,表(XY)函数中,X用于存储弹簧的挠度,Y用于存储该挠度所对应的载荷。UG/Motion以Akima插值方法计算相应挠度下的弹簧力。

图2 主副弹簧悬架弹性特性曲线Fig.2 Elastic characteristic curve of suspension with main and auxiliary spring
图2中,临界载荷Fk所对应的悬架挠度fk为:

式中:Fk为临界载荷;Km为主弹簧的刚度;F0为悬架空载载荷;β为临界载荷比,β=Fk/F0。
当悬架静挠度为f时,弹簧所对应的载荷为:

式中:α为主副弹簧刚度比。
原型系统将整个挠度的区间设置为[-3fk3fk],由于Akima插值算法[7]以包括本节点在内的5个数据点来确定插值公式,即各个节点的一阶导数以节点加上两侧相邻各2点来确定,且要确保一阶导数的计算结果准确,挠度间距必须是等距。
因此,在依据式(1)计算获得fk后,将[0 fk]区间4等分,[fk3fk]区间8等分,即可按式(2)计算相应挠度下的弹簧载荷。正负挠度区间的数据相对于坐标原点对称。
NX Open中,类NXOpen::CAE::AfuData用于管理AFU文件中相应记录中的数据,调用成员函数SetRealData()可将数据写入记录;相同命名空间下的类 AfuManager用于管理AFU文件及其中的记录,调用成员函数EditRecord
()即可完成该记录的修改。以图1主界面所示车辆参数,原型系统按“比例中项法”计算并写入AFU文件相应记录中的非线性弹簧弹性特性数据,如图3所示。

图3 非线性弹簧的弹性特性数据Fig.3 Elastic characteristic data of nonlinear spring
需要指出的是,在进行悬架动力学仿真分析前,应使弹簧静平衡,即应为主副弹簧和轮胎设置预载荷。与ADAMS系统不同,UG/Motion不能直接为弹簧添加预载荷力,而是通过修改弹簧的自由长度来添加预载荷。自由长度即弹簧在不受任何载荷作用时的长度,结构体 UF_MOTION_spring_damper_t的成员变量spring_ref_length与弹簧的自由长度相对应,其值为弹簧静平衡时的长度加上载荷所对应的弹簧静挠度。对于主副弹簧,当已知弹簧载荷时,其静挠度不难由式(2)反求获得。
2.2 路面不平度激励的确定
路面不平度是指路面相对于某个基准平面的高度,随道路走向而变化。由于汽车行驶时的主要激励来自路面,因此路面不平度的建模对悬架动力学仿真分析的准确性有着根本的影响。
原型系统采用谐波叠加法对8个标准等级路面进行重构。国家标准GB7031规定的路面不平度功率谱密度Gq(n)的拟合表达式为:

式中:n为空间频率,单位为m-1;n0为参考空间频率,n0=0.1 m-1;W为频率指数,通常取2。
由于在二自由度悬架虚拟样机模型中,模拟路面不平度的移动副其位移为时间的函数,为此将空间功率谱转换为时间功率谱为:

式中:f为时间频率;u为车速。
当模拟路面的空间频率在0.011 m-1<n<2.83 m-1之间时,取车速 u=36 ~108 km/h,根据 f=un,可得相应的时间频率范围f=0.33~28.3 Hz,该频率范围有效覆盖了汽车振动系统的固有频率区间。将f划分为 N个区间,用每一小区间的中心频率fi(i=1,2…,N)处的时间功率谱密度Gq(fi)代替Gq(f)在整个小区间内的值,则用谐波叠加法[8]产生时域随机路面不平度为:

式中:q(tj)为tj时刻所对应的随机路面不平度;Δf为时间频率步长;θi为[0 2π]上均匀分布的随机相位差。
设仿真时间为T,仿真步数为NUM,则tj为:

如图4所示为原型系统模拟生成的C级路面、车速80 km/h时的路面不平度曲线。图5为图4模拟生成的路面不平度功率谱密度与标准谱的对比曲线,从图5可以看出原型系统生成的时域路面不平度具有较高精度,满足谱一致的准则。
在UG/Motion中,模拟路面不平度的移动副其驱动数据,同样以表(XY)函数的形式存储在AFU文件的相应记录中。X用于存储仿真时刻tj,Y用于存储tj所对应的移动副位移q(tj)。其修改方法与非线性弹簧参数的修改相同,不再赘述。

2.3 设计变量初值的确定
由于轮胎刚度Kt相对固定,因此影响主副弹簧悬架性能的主要参数为主弹簧刚度Km、悬架阻尼C、主副弹簧刚度比α和临界载荷比β。
由于要满足满载时悬架静挠度fs小于许用静挠度[fs]要求[1],因此主弹簧刚度 Km不能太小,即:

式中:λc为满载载荷比;[fs]取值 0.13 m[1]。
另一方面,为满足车辆跳离地面的概率小于0.15%[9],应使车轮动载荷系数ξ满足:

ξ的计算及获取见2.4小节相关内容。当选取过大的主弹簧刚度Km,会使悬架空载时偏频增大,无法满足式(8)的要求,因此主弹簧刚度Km也不能选择得过大。
原型系统会按比例中项法和临界载荷法计算相应的α和β,依据式(7)推荐给出主弹簧刚度Km的最小值;空载时运行动力学仿真,查看车轮动载荷系数ξ可获得主弹簧刚度Km的最大值。
对于悬架的阻尼C,平顺性要求悬架阻尼比δ取较小值,行驶安全性要求δ取较大值。另一方面,在选取悬架阻尼C时,不应使空载与满载时阻尼比相差过大,一般汽车悬架系统的阻尼比范围[10]是 δmin=0.2,δmax=0.4。原型系统会依据车辆参数和主弹簧刚度,计算空载和满载时的最大、最小阻尼,并以空载时阻尼最大值和满载时阻尼最小值的中间值给出推荐的悬架阻尼。对于如图1所示原型系统主界面中的车辆参数,系统给出的设计变量初值提示信息,如图6所示。

图6 原型系统给出的设计变量初值提示信息Fig.6 Prompting message of initial value of design variables given by the prototype system
原型系统中,许用静挠度[fs]、阻尼比最小值δmin、最大值δmax可由用户确定,具体输入界面不再给出。
2.4 动力学仿真分析及结果的获取与显示
在原型系统实现虚拟样机模型的修改及仿真参数的获取后,即可运行动力学仿真,查看仿真分析结果。函数UF_MOTION_solve_model()用于执行以时间为基础的仿真分析。当虚拟样机模型具有一个及以上自由度时,函数执行动力学仿真,仿真分析的结果被保存在UG内部的数据库中,直到模型被更改或另一个仿真分析被运行。
衡量设计参数对悬架性能的影响,原型系统采用以下3个评价指标:
(1)平顺性,指车身的振动情况。一般通过车身的垂直振动加速度来评价。由于采用1/4车辆模型,因此只考虑悬挂质量的垂直振动加速度,加速度均方根值为:

式中:α(t)为悬挂质量的垂直振动加速度。
与ADAMS系统相似,为获取悬挂质量的垂直振动加速度,可在模型中主副弹簧的上安装点处,为悬挂质量添加Marker点。在执行仿真分析后,调用函数UF_MOTION_ask_acceleration_results()即可从UG的内部数据库中获取该Marker点在每一仿真时刻对应的加速度值,由此可按式(9)计算获得悬挂质量的加速度均方根值。
(2)悬架动行程,评价指标为悬挂质量与非悬挂质量之间的相对位移,亦称悬架动挠度。原型系统采用悬架动行程的均方根值[10]作为其评价指标,表达式为:

式中:z2(t)为悬挂质量的位移;z1(t)为非悬挂质量的位移。
为获取非悬挂质量的位移,可在主副弹簧的下安装点处,为非悬挂质量添加Marker点。调用函数UF_MOTION_ask_trans_displacement_results()可获取该Marker点在每一仿真时刻Z坐标的位置。悬挂质量位移的获取方法与此类似。
(3)轮胎接地性,指车辆行驶过程中车轮是否出现跳动。车轮的跳动会影响车辆驱动力或制动力的发挥,从而导致行驶方向失控,因此接地性对车辆的操稳性和安全性的影响很大。原型系统采用车轮动载荷系数[9]作为其衡量指标,表达式为:

式中:F(t)为模拟轮胎的弹簧力;m1为非悬挂质量;m2为实际悬挂质量。
调用函数UF_MOTION_ask_force_results()可获取每一仿真时刻模拟轮胎的弹簧上所承受的力F(t)。这样,即可按式(11)计算获得车轮的动载荷系数。
图7为原型系统对仿真结果的显示。
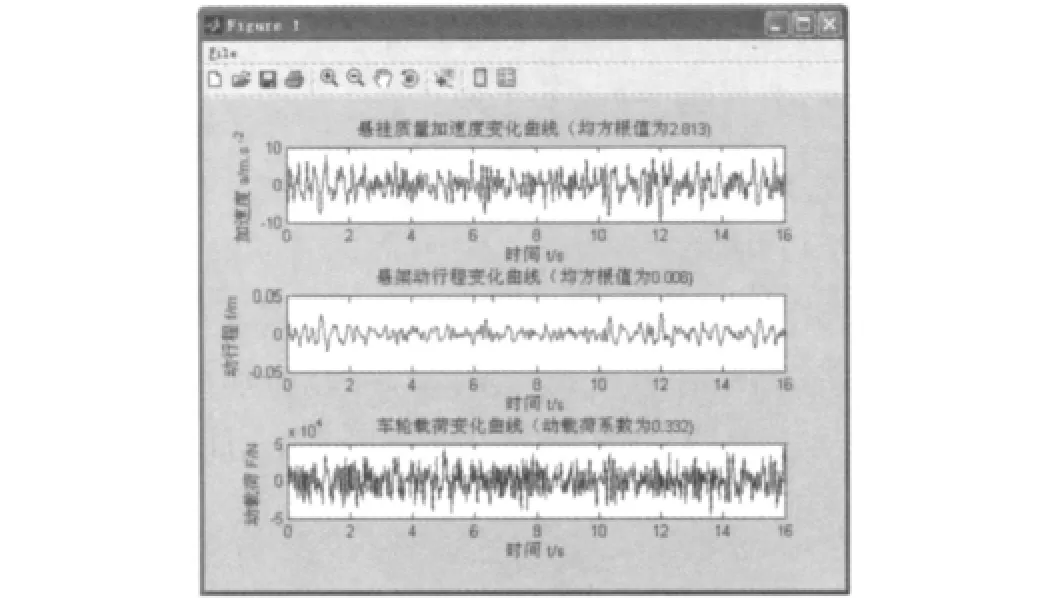
图7 原型系统对仿真结果的显示Fig.7 Simulation results displayed by the prototype system
3 遗传优化设计模块
传统常规的机械设计优化方法,大多是从设计空间的单个点出发,根据相应规则进行点到点的顺序搜索,很难处理经常遇到的非凸、高度非线性等参数优化问题,且对于多峰值问题的求解很容易收敛于局部最优解。遗传算法则是从一个初始种群开始,不断产生和测试新一代的种群,这种方法从一开始便扩大了搜索范围,可较快地获得问题的全局最优解。因此,系统采用遗传算法来实现的主副弹簧悬架系统的设计变量优化。
3.1 设计变量和约束条件
取优化的设计变量为悬架阻尼C、主副弹簧刚度比α和临界载荷比β。约束条件为:
式中:fs为满载时悬架的静挠度,单位m;ξ为车轮动载荷系数;frms为悬架动行程均方根值,单位m。
为防止车辆在不平路面上行驶时经常冲击缓冲块而使平顺性变差,悬架必须有足够的动挠度。通常货车的限位行程[fd]≤0.06~0.09 m,悬架动行程均方根值frms≤[fd]/3时,可保证悬架冲击限位块的概率小于0.3%[9],系 统 选择[fd]=0.09 m。原型系统的“遗传优化设计”选项卡如图8所示。
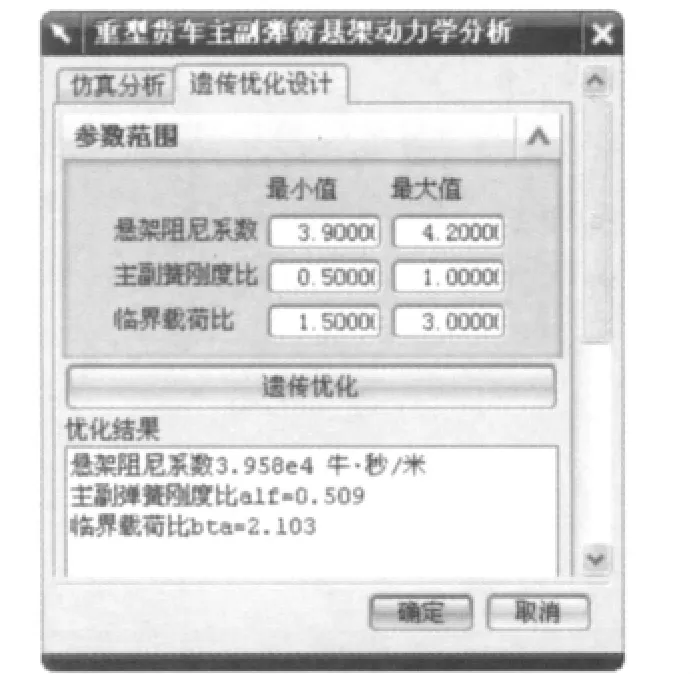
图8 原型系统的“遗传优化设计”选项卡Fig.8 The“Genetic Optimization”tab
3.2 目标函数
优化的悬架参数应使车辆在不同的载荷下都具有良好的平顺性,为此目标函数选择平顺性评价指标。悬挂质量垂直振动加速度均方根值αrms随载荷变化为一连续曲线[1],目标函数应使曲线下的面积最小,为减少优化过程中运行动力学仿真的次数,将空载和满载悬挂质量区间4等分,以4个梯形面积之和来代替曲线下的面积,由此确定目标函数为:

式中:Δm=(m2f- m2e)/4,m2f为满载悬挂质量,m2e为空载悬挂质量;mi=m2e+iΔm。
4 系统验证与实例分析
为验证系统正确性,选择文献[1]中某重型货车的参数进行实例分析。车辆参数的具体数值如图1所示。通过原型系统给出的如图6所示设计变量初值提示信息,选择主弹簧刚度为Km=8×105N/m,悬架阻尼系数初值C=4×104N·s/m。选择比例中项法计算得到主副弹簧刚度比α=0.902,临界载荷比β=1.902,弹簧的弹性特性数据如图3所示;选择C级路面、车速80 km/h计算获得路面不平度曲线如图4所示。
在ADAMS系统中,建立1/4车辆悬架虚拟样机模型,并将弹簧弹性特性数据和路面不平度数据导入ADAMS虚拟样机模型,在悬挂质量为8 000 kg时,ADAMS仿真分析得到的悬挂质量加速度随时间变化曲线如图9所示。

图9 ADAMS悬挂质量加速度仿真结果及虚拟样机模型Fig.9 ADAMS simulation curve of the acceleration on suspended mass and the virtual prototype model
相同条件下,通过原型系统仿真分析获得的悬挂质量加速度变化曲线与ADAMS仿真结果的对比,如图10所示。可以看出,仿真结果基本一致,原型系统计算得到的加速度均方根值为 2.079 m/s2,ADAMS为2.082 m/s2,两者在数值上稍有差异,分析原因发现,这主要是由于解算器不同造成的。由于原型系统所运行的虚拟样机模型包含有非线性弹簧,UG/Motion要求只能使用RecurDyn解算器。

图10 原型系统与ADAMS仿真结果对比Fig 10 Simulation result comparison between the prototype system and ADAMS
使用原型系统的遗传优化设计模块,对选取的三个设计变量进行优化,设计变量的取值范围如图8所示,最终的优化结果为:悬架阻尼系数C=3.985×104N·s/m,主副弹簧刚度比α=0.509,临界载荷比β=2.103。
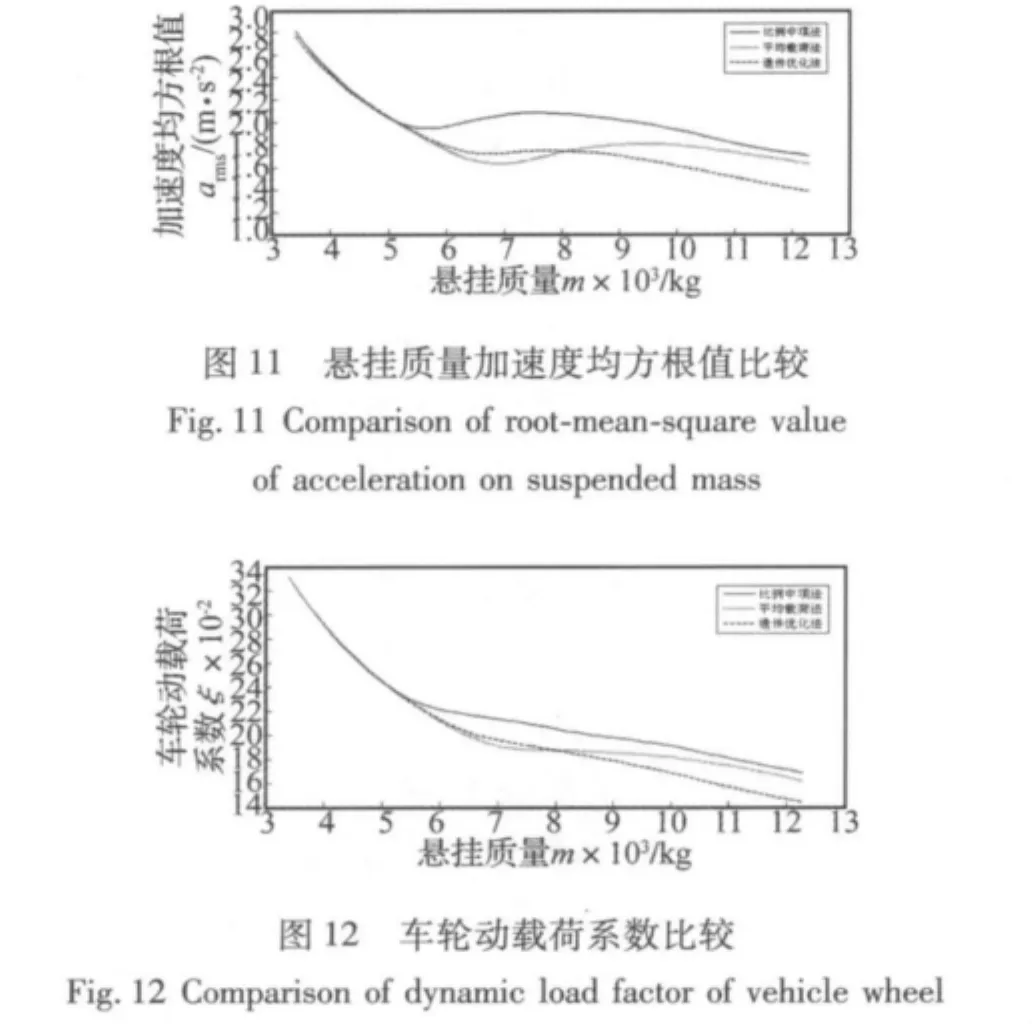
对于整个载荷变化区间,采用遗传优化方法优化后的设计变量与悬架阻尼系数初值为4×104N·s/m,按比例中项法和平均载荷法计算得到的主副弹簧刚度比α及临界载荷比β,对悬挂质量加速度均方根值的影响比较,如图11所示;对车轮动载荷系数的影响比较,如图12所示。从图中可以看出,优化后满载时悬挂质量加速度均方根值和车轮动载荷系数都有明显下降,提高了整车的平顺性,减小了对路面的损伤。
5 结论
(1)基于UG/Motion及UG系统的开放结构,提出了一种构建非线性悬架动力学特性仿真分析系统及结构参数优化的新方法。该方法无需构建非线性悬架系统复杂的动力学微分方程,仿真结果的输出基于悬架的虚拟样机模型和多刚体动力学解算器,基于该方法开发的原型软件系统构建简单、应用方便直观;
(2)将多刚体动力学和遗传优化方法相结合以优化悬架结构参数,未来可在原型系统中集成更多优化方法如基于响应面法的稳健优化方法、模糊优化方法和神经网络的遗传优化方法等,为复杂机构及悬架系统的动力学特性分析与优化拓展了研究思路。
(3)原型系统能够实现不同标准等级路面的主副弹簧非线性悬架系统的动力学仿真,其遗传优化设计模块能够实现悬架阻尼系数、主副弹簧刚度比和临界载荷比三个设计变量的优化,实例分析显示设计变量的优化能够有效提高悬架的动力学特性;通过将原型系统的仿真结果与ADAMS相对比,验证了原型系统的正确性。
[1]杨啟梁.重型货车非线性悬架结构参数动力学优化[J].农业机械学报,2007,38(6):23 -25.
[2]唐应时,唐驾时.采用主付钢板弹簧的汽车悬架偏频[J].湖南大学学报,1989,16(4):57 -65.
[3]Sungsoo K,Wonkyu M,Youngil Y.An efficient method of calculating the nonlinear stiffness of progressive multi-leaf springs[J].International Journal of Vehicle Design,2002,29(4):403-422.
[4]Shokrieh M M,Rezaei D.Analysis and optimization of a composite leaf spring[J].Composite Structures,2003,60(3):317-325.
[5]江 洪,李仲兴,周文涛,等.基于遗传算法的ECAS系统中三级阻尼匹配优化设计[J].机械工程学报,2009,45(10):278-283.
[6]仝军令,李 威,傅双玲.油气弹簧主要参数对悬架性能的影响分析[J].系统仿真学报,2008,20(9):2271-2274.
[7]Akima H.A new method of interpolation and smooth curve fitting based on local procedures [J].Journal of the Association for Computing Machinery,1970,17(4):589-602.
[8]潘双夏,陈助碧,冯培恩.M-Fils S-函数在时域路面不平度建模中的应用[J].中国工程机械学报,2006,4(4):379-384.
[9]余志生.汽车理论(第3版)[M].北京:机械工业出版社,2000.
[10] Lu S.Optimum design of“road-friendly”vehicle suspension systems subjected to rough pavement surface[J].Applied Mathematical Modelling(S0307 - 904X),2002,26(5):635-652.
Construction of dynamic simulation system of heavy truck suspension with main and auxiliary springs based on UG/Motion
HOU Yong-tao1,ZHOU Kong-kang2,LU Jian-hui2,WANG Ruo-chen2
(1.School of Mechanical Engineering,Jiangsu University,Zhenjiang 202013,China;2.School of Automotive and Traffic Engineering,Jiangsu University,Zhenjiang 212013,China)
A new construction method for dynamic simulation system of heavy truck suspension with main and auxiliary springs based on UG/Motion was proposed.The corresponding software prototype system was developed based on a 2-DOF virtual prototype model of the quarter vehicle.Using the simulation analysis function module of the prototype system,the principal design parameters of the prototype model can be rapidly and conveniently edited and the time-domain road roughness model can be generated based on the harmonic superposition method.The information of the road roughness was imposed on the virtual prototype model to create the excitation on a translation motion.By calling the RecurDyn solver,which is integrated in UG/Motion,and utilizing the simulation analysis function module,the simulation results were obtained.The simulation results can be inspected using the drawing function of Matlab.Taking the minimum of the root-mean-square value of vibration acceleration of suspended mass as objective function,the optimization design function module of the prototype system was constructed based on genetic algorithm and applied to optimize the suspension's damping value as well as the stiffness ratio and critical load ratio of the main and auxiliary springs.The correctness and the validity of the system and its function module were verified by a design example.
heavy truck;main and auxiliary spring;nonlinear suspension;dynamic analysis
U463.33
A
国家自然科学基金(50905078);教育部博士点基金项目(20093227120004);江苏大学高级专业人才科研启动基金项目(10JDG064)
2011-04-07 修改稿收到日期:2011-09-09
侯永涛 男,博士,副教授,1975年生
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
铁道建筑技术(2021年6期)2021-07-12
小资CHIC!ELEGANCE(2021年45期)2021-01-11
科学技术与工程(2020年36期)2020-02-04
英美文学研究论丛(2018年2期)2018-08-27
北京汽车(2016年6期)2016-10-13
剑南文学(2016年14期)2016-08-22
人间(2015年20期)2016-01-04
汽车实用技术(2015年8期)2015-12-26