横摇与纵摇对SⅡ型海洋重力仪的干扰分析
2012-02-26 11:48谢清陆居向明
装备制造技术 2012年2期
谢清陆,居向明
(海军蚌埠士官学校,安徽 蚌 埠 233012)
海洋船载重力测量同陆地重力测量的最大区别就是:它是一种动态测量,而陆地重力测量是一种静态测量。目前,美国LaCoste&Romberg公司生产的SⅡ型海洋重力仪(AIRSEA SystemⅡ)已经应用于我国的海洋船载重力测量。SⅡ型海洋重力仪工作时,测量船的横摇与纵摇对观测结果的影响,是海洋重力测量的主要误差源。在实施海洋重力测量外业时,测量船的横摇与纵摇产生的扰动加速度和需要测量的重力加速度混杂在一起,给海洋重力测量带来很大的困难,并产生很大的观测误差。本文主要就是分析测量船的横摇与纵摇对海洋重力测量的影响,并根据分析结果设计陀螺平台,进而减弱误差影响,提高海洋重力测量的精度。
1 横摇与纵摇对海洋重力测量的干扰分析
对于重力测量,不论是何种类型的重力仪,要准确地测出重力加速度的值,都必须保持仪器垂直于地球表面。在陆地重力测量中,这种垂直状态,是通过仪器的整平来实现的。由于陆地基座的稳定性,仪器整平后基本上一直保持着垂直状态。而海洋重力仪是在测量船不断处于横摇与纵摇的状态下工作的,各个方向的摇摆,使得重力仪的垂直状态受到破坏,重力仪在这种状态下根本无法进行观测。
船的摇摆,主要是由波浪引起的。船在波浪作用下的摇摆周期,并不取决于船的固有周期,而是随风浪周期在摇摆。摇摆的幅度,取决于波浪的汹涌程度和两个周期间的差异程度。摇摆中,以船受横浪作用产生的横摇为主;纵摇的强弱,决定于船长和波长之比。船只在海上的状况与海况密切相关。横、纵摇强度由波浪性质、航向与风向、波浪传播方向的关系及航行速度等决定。表1为俄罗斯科学院地球物理研究所应用倾斜仪及加速度计在2万t级船的不同部位测得的水平加速度和垂直加速度数据。由表中可见船上不同位置加速度的差异,造成这种差异的原因,是船重心附近受横摇与纵摇影响小,而在船头部分则影响大。

表1 2万t级船只不同部位测得的加速
一般安装重力仪的测量船排水量为数千吨,航行时船体产生的水平加速度和垂直加速度比上表的数值要大得多,在平静海况下横摇与纵摇作用在重心仪上的垂直附加加速度也要达10~20 Gal;在恶劣海况下,这种垂直附加加速度可高达数百伽。当海况特别恶劣,垂直附加加速度过大时,就无法进行海洋重力测量。要消除横摇与纵摇对SⅡ型海洋重力仪的影响,除了要将SⅡ型海洋重力仪安装在测量船重心附近外,还可以通过增设附属设备,使得重力仪在测量船摆动的状态下仍然保持垂直。这种附属设备就是光纤陀螺稳定平台。
2 陀螺稳定平台设计工作原理
2.1 平台机械结构设计
陀螺平台通过双轴常平架悬吊在底座上(如图1)。

图1 陀螺平台结构图
当测量船发生横摇或者纵摇时,安装在垂直陀螺仪常平架轴上的同步角度检测器,用来检测和放大垂直陀螺仪轴与稳定平台的相对倾斜角,然后将信息传输给分别安装在稳定平台常平架的纵摇轴和横摇轴上的伺服马达,使之能自动跟踪垂直陀螺仪的姿态。
从实际应用上讲,具有两组速率陀螺仪的稳定平台最为合理,其由下述部分构成:
(1)两组速率陀螺仪;
(2)两组水平加速度计;
(3)两组力矩马达;
(4)两个方向具有自由度的常平架。
将稳定平台的平台面,分为相互垂直的X轴与Y轴,横摇与纵摇的影响无非是使稳定平台面倾斜,此时的倾斜可以分为X轴方向的倾斜与Y轴方向的倾斜。
2.2 平台工作原理
当出现倾斜情况时,陀螺稳定平台内部就会开始运转,使平台保持平衡状态(如图2)。
如果常平架倾向Y轴,该倾斜的角度,可以由水平加速度计X检测出来,加速度计输出的信息,通过陀螺转矩放大器传给速率陀螺仪Y的力矩马达。常平架在Y轴上与陀螺仪的旋转轴一起运动,该运动一直持续到常平架上的水平加速度计X的输出变为零为止。以上与垂直陀螺仪的工作原理是类似的。
当常平架由于轴的摩擦或力学平衡遭到破坏,导致Y轴上的运动受到阻碍时,其阻碍力可由安装在速率陀螺仪输出轴上的角度检测器检测出来,通过纵摇方向的跟踪放大器将信息传输给纵摇力矩马达来消除这种阻碍力。如果输出检测器和力矩马达的性能均很强,则常平架将不受旋转轴的摩擦或不平衡的影响,由水平加速度计来直接控制其平衡。
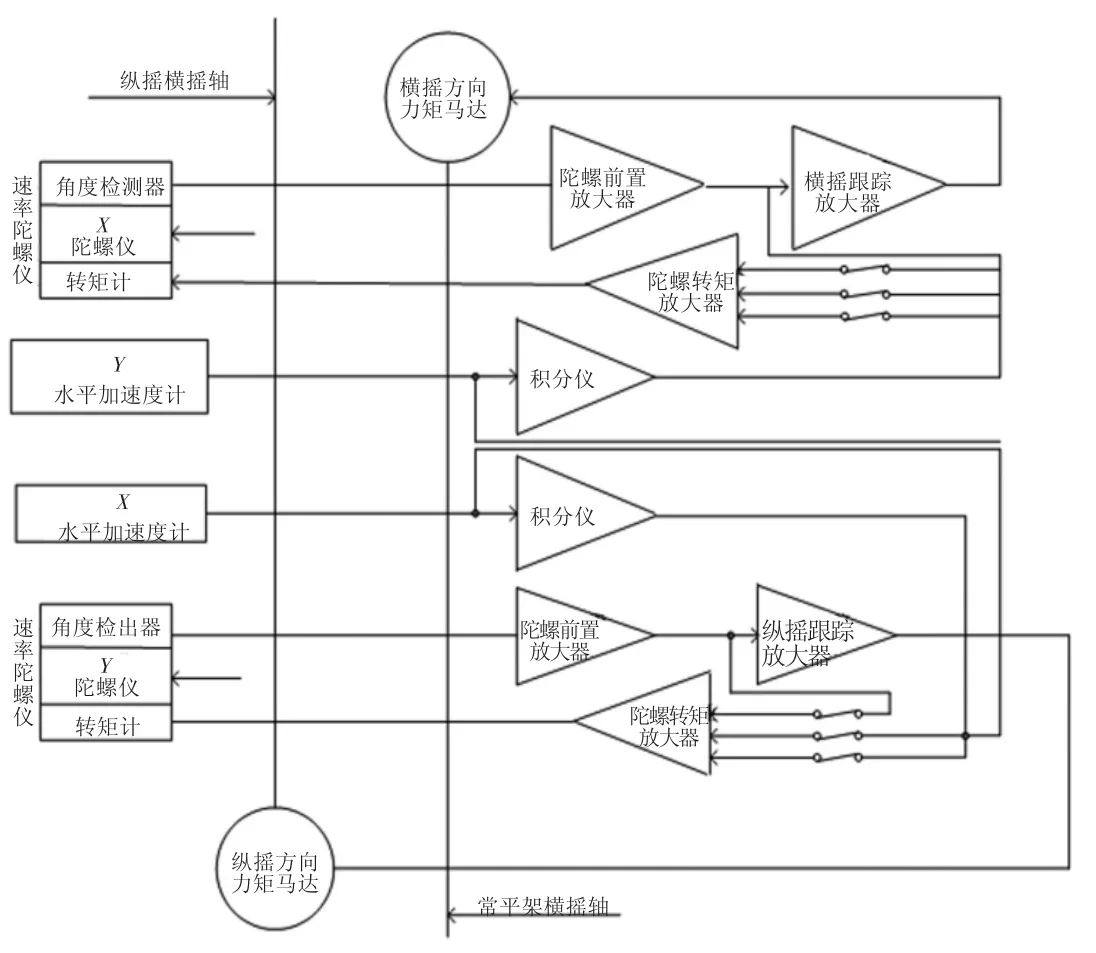
图2 陀螺平台工作原理图
同理,常平架的X轴倾斜时,也以同样方式获得平衡。
3 结束语
SⅡ型海洋重力仪由于净质量小、精度高、分辨率高等优点,已开始应用于海洋重力测量。如何减弱测量船的横摇与纵摇对重力仪的影响,进一步提高海洋重力测量的观测精度,一直是海洋重力测量人员的努力方向。为了充分发挥AIRSEA SystemⅡ的性能优势,增加陀螺稳定平台减弱横摇与纵摇对重力仪影响的方法,将会越来越多地应用于海洋重力测量中。
[1]欧阳永忠,孙 毅,黄谟涛.SⅡ型海洋重力仪的特点及使用问题[J].海洋测绘,2006,(6):12-15.
[2]卢景奇.提高浅海重力测量观测精度的方法技术[J].物探化探计算技术,2007,(10):21-23.
[3]王福民,叶宇星.S-Ⅱ型海洋重力仪介绍和使用方法[J].物探装备,2007,(9):31-33.
[4]吴秋平,高钟毓.高精度重力测量技术进展[J].导航,2003,(6):15-17.
[5]吴太棋,黄谟涛,陆秀平,金迹航.重力场匹配导航的重力图生成技术[J].中国惯性技术学报,2007,15(4):438-441.
猜你喜欢
环球时报(2022-08-15)2022-08-15
军事文摘(2021年22期)2022-01-18
北京航空航天大学学报(2021年9期)2021-11-02
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
百科探秘·航空航天(2017年9期)2017-12-31
智富时代(2017年7期)2017-09-05
智富时代(2017年7期)2017-09-05