
轻型反潜鱼雷最优垂直命中末弹道设计
2012-05-28 01:22聂卫东高智勇刘艳波
水下无人系统学报 2012年1期
聂卫东, 高智勇, 刘艳波
轻型反潜鱼雷最优垂直命中末弹道设计
聂卫东, 高智勇, 刘艳波
(中国船舶重工集团公司第705研究所, 陕西 西安, 710075)
在轻型反潜鱼雷最优垂直命中弹道设计中, 基于庞特里亚金(Pontryagin)极小值原理解析求解得到的最优垂直命中导引律具有理论基础完备、形式简洁等优点, 但因其推导过程进行了一系列简化处理, 适用范围变窄, 且控制系数不易获得, 事实上难于直接应用。为此, 本文提出了一种实用的鱼雷最优垂直命中末弹道的设计方法, 即对上述导引律进行面向工程应用的二次优化设计, 从而得到满足不同初始作战态势下的最优导引律。通过弹道数字仿真验证了该方法的可行性和可靠性。分析了末弹道优化系统的设计灵敏度, 提出了合理的优化设计建议。
轻型反潜鱼雷; 垂直命中; 庞特里亚金极小值原理; 末弹道优化; 导引律
1 垂直命中含义及指标
随着现代潜艇防护能力的日益提高, 以有限的鱼雷战斗部装药量和传统的全向爆破方式越来越难以有效地毁伤潜艇。为使鱼雷有限装药量的战斗部达到最大的爆破效果, 提出以触发定向聚能爆破方式对潜艇实施攻击, 从而大大提高反潜鱼雷的毁伤概率。而要最大限度发挥定向聚能爆破的效力, 则要求鱼雷尽可能垂直命中目标。鱼雷垂直命中目标理论上的含义是指, 鱼雷命中目标时, 其纵轴线垂直于目标壳体上命中点的切平面, 即鱼雷战斗部定向爆破方向为此平面的法线反方向。在现有技术条件下, 鱼雷自导系统一般无法精确测量并给出预计命中点切平面的法线方向, 而能够较为准确地测量出目标水平面内的航向, 基于此, 工程上“垂直命中”的含义为鱼雷命中目标时, 其纵轴线垂直于目标瞬时水平航向。
不同的反潜鱼雷有其不同的聚能装药形式和爆破控制方式, 因此垂直命中指标也各有不同。本文设计的鱼雷最优垂直命中末弹道的指标: 将潜艇目标简化为质点, 雷目质心距离小于某一设定脱靶量时认为鱼雷命中目标, 此时鱼雷航向与目标航向之间夹角处于所要求的正交范围内。
2 鱼雷垂直命中末弹道起始条件
实现鱼雷垂直命中目标的导引弹道称为垂直命中末弹道, 鱼雷垂直命中末弹道的起始点指鱼雷稳定跟踪目标, 自导系统探测并确认真实目标, 完成目标尺度识别(目标航向精确探测)后转入垂直命中导引的瞬间。
2.1 攻击态势
进入垂直命中末弹道时, 考虑鱼雷自导系统尺度目标识别距离和最优导引最小机动距离限制, 末弹道起始雷目距离设定在一定范围内。在水平面内, 鱼雷可在360°范围内全向攻击, 在纵平面内, 鱼雷或已处于与目标等深(自导估计)攻击平面内, 或正处于纵平面导引阶段, 纵平面导引通常采用追踪法。
2.2 导引信息
鱼雷进入垂直命中末弹道时, 自导系统能够提供的目标信息包括[1]: 1) 大地坐标系内目标的运动学信息, 包括目标坐标、目标速度、目标航向等; 2) 雷体坐标系内目标的方位信息, 包括视线角、雷目距离、目标水平和垂直方位角等。
3 鱼雷最优垂直命中导引律
本文所设计的鱼雷垂直命中末弹道方案采用基于庞特里亚金(Pontryagin)极小值原理[2-3]的最优导引律, 将鱼雷最优垂直命中问题视为一类最优控制问题, 实现鱼雷垂直命中目标的过程就是在雷目相对运动学、动力学和鱼雷制导模型基础上采用最优控制理论与方法求解最优垂直命中控制律的过程。最优导引属于最优化的范畴, 简言之就是寻求目标泛函的极值问题。
3.1 鱼雷动力学状态方程
将鱼雷导引过程的运动学、动力学、制导及环境特性等所有方面都包含在最优导引律的求解问题中, 会使最优导引问题复杂到无法解决。为抓住主要矛盾必须进行简化, 参考相关文献的处理方式[4-6], 将鱼雷导引过程的状态方程简化为1阶滞后环节。用x,v,a表示鱼雷的位移、速度和加速度, 用x,v,a表示目标的位移、速度和加速度, 用和表示雷目相对位移和相对速度。
作为受控系统的鱼雷状态方程为

3.2 末弹道最优控制律求解
为减小接近目标时鱼雷弹道的许用过载, 达到提高垂直命中精度的目的, 垂直命中末弹道采用间接导引法, 首先将鱼雷导引到零控曲面[7], 然后由零控曲面到达命中点。其物理含义是, 先将鱼雷的航行方向导引到对准预测相遇点, 将全弹道所必需的许用过载集中在此段导引中, 此后只需对鱼雷航行进行微调, 即可实现垂直命中。
最优垂直命中问题的汉密尔顿函数为[8]


导引终端边界条件为


式中:即为零控曲面, 其物理含义是在零控曲面上雷目相对速度矢量和相对位移矢量平行且相反;为比例系数;为导引至零控曲面所用时间。从这种状态出发, 即使不加控制(=0)也能达到零脱靶。式(4)表示到达零控曲面时, 鱼雷的航向与目标的航向垂直。
略去浩繁的推导过程, 给出水平面最优垂直命中导引律为


根据古典导引律推导得到垂直面追踪法导引过程中鱼雷的俯仰角速率指令计算式为

参见鱼雷攻击态势图1, 鱼雷末弹道水平面内最优垂直命中导引过程为一角速度跟随控制过程。
4 鱼雷最优垂直命中导引弹道优化设计
虽然基于庞特里亚金极小值原理求解的最优垂直命中导引律的理论推导本身就是一个优化过程, 但在形成控制律时作了许多简化, 因而得到的已不是最优而是一个次优结果, 且不能应用于随机初始态势的情况。因此, 为寻求工程适用的垂直命中导引律, 得到更好的末弹道特性和更高的命中精度, 有必要对上述导引律进行二次优化设计, 以满足工程应用。
图1 末弹道雷目水平态势图
4.1 二次优化设计问题描述
二次优化设计的数学描述如下[9]
在鱼雷最优垂直命中弹道优化设计中, 优化目标为命中角度, 在仿真中为一范围目标, 即90°±10°指标。优化约束为末弹道导引过程中鱼雷机动的最大旋回角速度和最大俯仰角速度, 同时优化的前提是鱼雷命中目标, 因此鱼雷最终命中目标也是一项优化约束, 在仿真中为一布尔型标志变量。设计变量为式(5)和式(7)中的1,2,3,4和k这5个控制系数, 优化设计过程就是寻求最优的一组控制系数, 使得式(5)成为适合特定态势下的最优垂直命中导引律; 当关注子系统时, 也可将子系统的性能参数指定为设计变量, 如鱼雷自导系统设计参数或性能参数, 前者考察子系统设计特性, 后者为总体对于子系统的性能要求。
状态变量包括鱼雷及目标的运动学参数、相对运动学参数(如雷目距离、相对速度等)、导引时间和航程等。系统参数为描述工程系统特征的一组固定参数(或满足一定分布律的随机参数), 在设计过程中一般不能为设计者所控制, 如不再更改的系统设计参数和环境参数等。
4.2 鱼雷垂直命中导引弹道优化设计数学模型
基于前述, 轻型鱼雷机动性能优良, 可认为雷体能够实时响应角速度跟随控制指令, 并且雷体横滚能够得到有效控制, 因此优化模型建立在最优垂直命中导引弹道阶段鱼目相对运动学分析基础之上, 而忽略鱼雷和目标的水动力学操控特性, 这有利于将研究关注点集中于不同操控性能鱼雷垂直命中弹道优化设计的共性问题。
1) 鱼雷最优垂直命中导引弹道数学模型
鱼雷运动学模型用一组代数方程描述如下。
2) 目标运动学数学模型
与鱼雷运动学仿真模型类似建立目标的运动学模型如下。
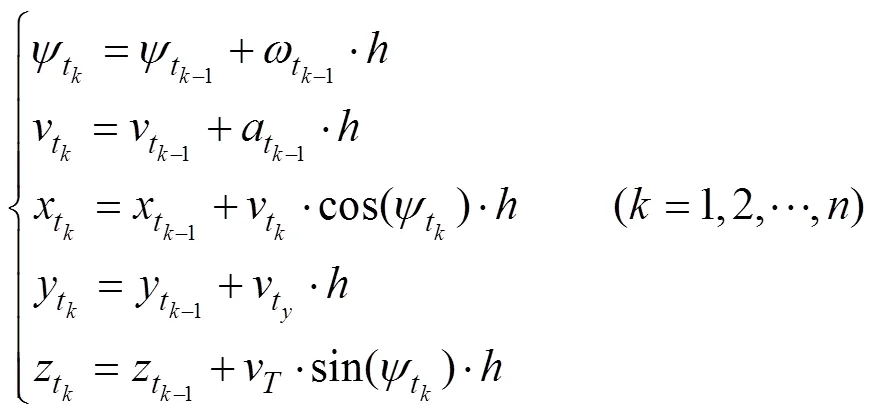
综上所述, 模型计算受2个时间周期约束,其中鱼雷和目标当前运动学参数随仿真步长推进变化, 而由鱼雷自导系统提供的目标运动学参数及其他探测参数随自导声周期的推进变化。
4.3 鱼雷最优垂直命中导引弹道优化设计流程
采用MATLAB/SIMULINK建立雷目相对运动学仿真模型, 将仿真模型通过输入/输出参数映射与优化工具Optimus V9进行连接, 建立优化模型。
单一特定作战态势的垂直命中导引弹道优化设计没有实际应用价值, 仅可用于系统性能分析, 因为实际作战情况千变万化, 不存在普遍适用的最优垂直命中导引弹道方案, 而目前雷上计算机性能还不能满足在线优化计算的实时性要求, 不可能针对每一种作战态势规划一种弹道。为使弹道优化设计能够达到实用程度, 必须设计在一定的初始态势范围内适用的最优或次优垂直命中导引弹道方案, 给出不同初始态势范围内的设计变量, 形成一张鱼雷垂直命中弹道射击参数表, 覆盖所有可能的初始态势。将此表预存于雷上计算机内, 在作战时便可依据不同的垂直命中弹道初始态势选择弹道方案, 实现垂直命中目标的作战需求。
为实现任意作战态势下的优化设计目标, 需要对基于庞特里亚金极小值原理解析求解得到的最优垂直命中导引律进行二次优化, 即当系统的状态变量和(或)系统参数在接近于工程实际情况的随机误差范围内波动时, 寻求满足设计要求和设计约束的优化结果。二次优化计算得到的设计变量除了能够使优化目标达到最优外, 还需使其满足一定的可靠性要求, 比如一定初始态势范围内要求鱼雷垂直命中目标的可靠度大于99%, 即要求出现命中角度超出垂直命中指标范围的可能性小于1%, 在优化计算中则表示状态变量和(或)系统参数在一定的范围内按照已知的分布律随机波动时可容忍的优化失效率小于1%。
针对随机初始作战态势进行最优垂直命中弹道的二次优化设计流程如图2所示。
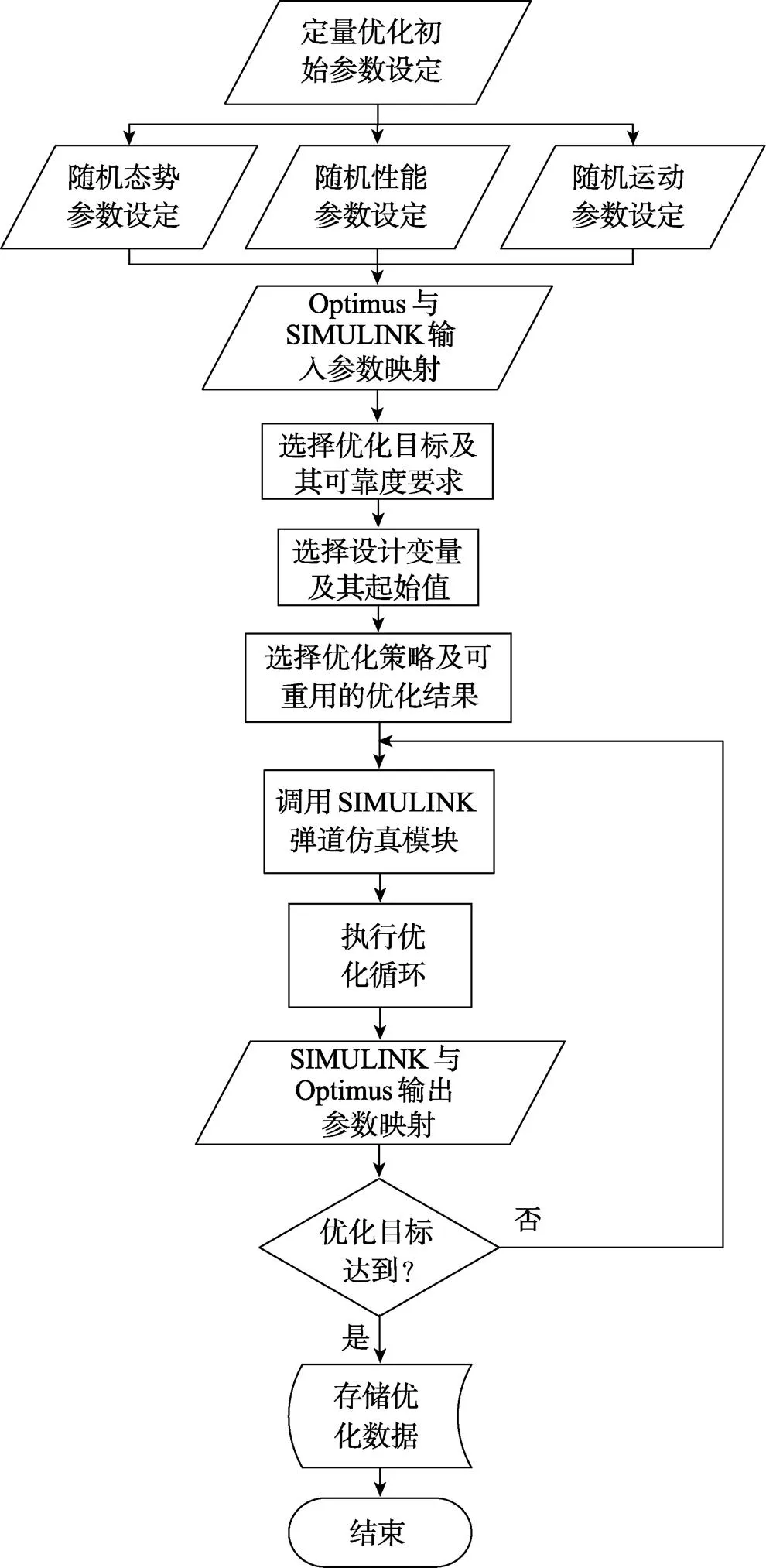
图2 鱼雷垂直命中末弹道二次优化设计流程
4.4 鱼雷最优垂直命中导引弹道优化计算
假定目标匀速直航, 在鱼雷垂直命中导引开始后不进行机动, 或已完成机动而沿逃逸航向航行, 各输入参数未加入系统及随机误差。初始雷目相对位置分为追击和迎击2种态势, 如图3所示。
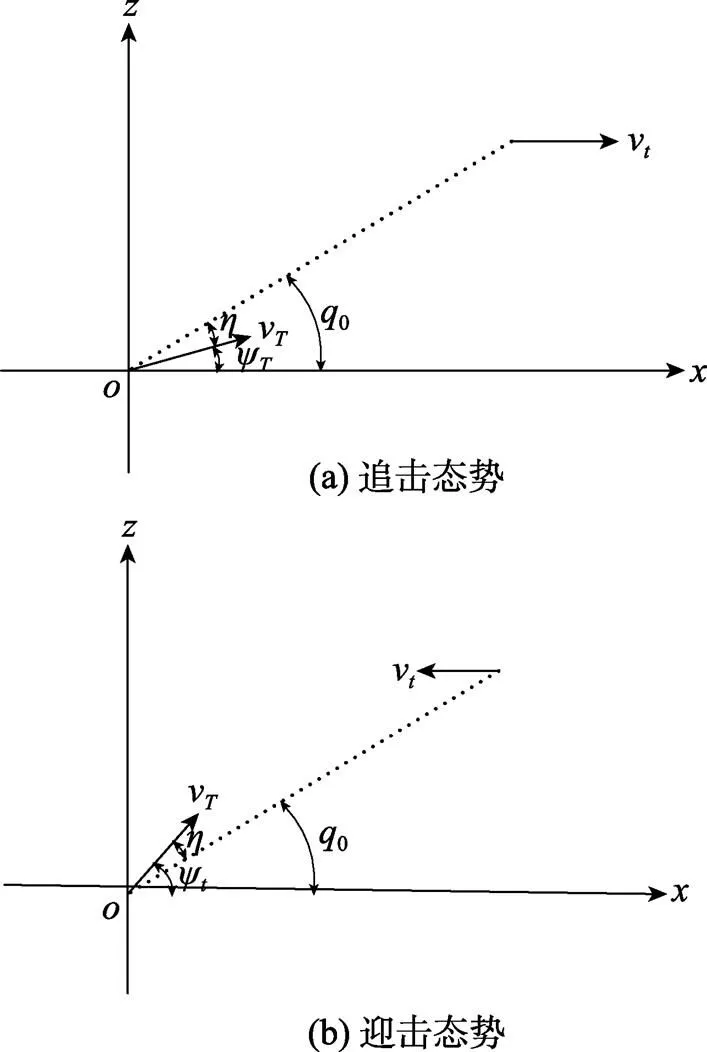
图3 初始雷目相对位置
作为一个实例, 下面给出一个特定的优化计算来进行分析。最优垂直命中导引过程是一个角速度跟随控制过程, 第1象限的鱼雷水平导引弹道与第2, 3, 4象限的弹道类似, 不同之处仅仅在于角速度指令的符号, 因此以下仅讨论第1象限的情形。
优化计算初始设定、优化目标及其可靠度、设计变量及设计约束等见表1和表2。
a) 初始设定
雷目初始视线角由目标相对于鱼雷的初始方位决定, 由表可见, 追击态势下第1象限内雷目初始视线角共分为3个区间进行优化计算, 分别是: 15°~30°、30°~60°和60°~90°, 迎击态势下第1象限内雷目初始视线角与追击态势一样分为3个区间进行优化计算。事实上, 初始雷目距离和目标初始航速也需划分态势区间, 以得到更为广泛适用的最优控制律, 这里为简化寻优计算而仅对目标初始方位进行了态势划分。需要指出的是, 小视线角初始态势下(尤其是目标大航速时)很难得到垂直命中弹道的优化设计点, 必须采用其他方法实现垂直命中, 这个问题将在另文中加以讨论。
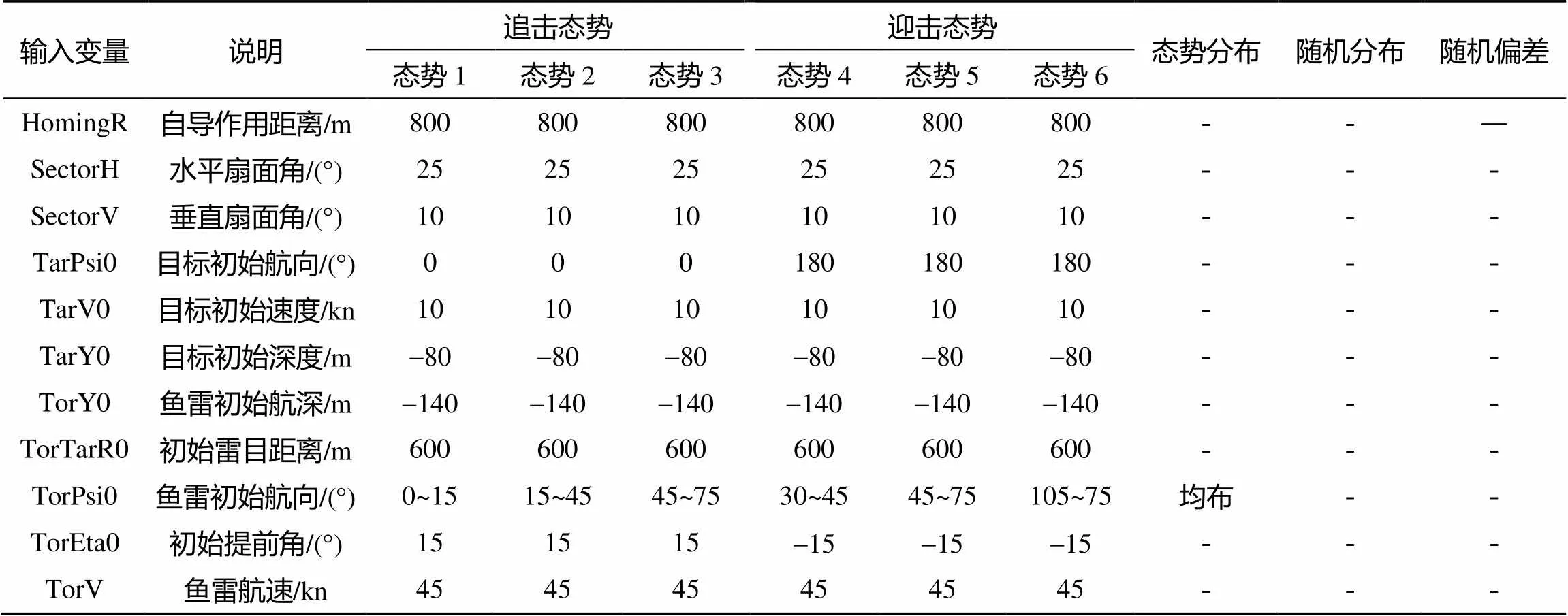
表1 优化计算初始设定
表2 6种初始态势下的优化结果
b) 优化计算及结果输出
优化计算方法选用遗传算法, 兼顾效率与精度。优化计算会得到多组满足要求的结果, 表2仅列出相对最优的一组。
将上述输入参数及优化结果代入末弹道数字仿真程序, 在6种初始态势范围内任意给定一固定态势, 运行仿真得到6种态势的导引弹道曲线, 图4仅示出水平面导引弹道。
4.5 系统近似与系统灵敏度分析
在优化设计中, 灵敏度分析是指对系统性能因设计变量或系统参数的变化显示出来的敏感程度的分析[9]。分析系统灵敏度有助于设计者关注影响优化设计的主要因素, 从而有针对性地改进设计。通常灵敏度分析不像数学中求函数的偏导数那么简单, 原因是系统优化模型往往不会有显式形式, 因此通常要对系统进行近似处理以利于分析灵敏度。Optimus中采用基于试验设计理论(design of experiment theory, DOE)的方法构建系统的多项式拟合近似模型, 在此模型基础上进行系统灵敏度分析。
对系统进行全参数灵敏度分析结果如表3(附表)所示。表3中横坐标为待分析参数, 纵坐标为影响参数, 影响度用无因次数表示, 数字越大, 表明影响度越大, 负号表示影响是逆向的。感兴趣的是影响优化目标命中角度(HitAngleOut)的各参数, 可以看到, 目标速度(TarV0)对优化目标产生的逆向影响最大, 目标航速越大, 实现垂直命中的几率越小, 因此鱼雷对抗高速目标时要采取补偿措施, 以抵消目标高速的不利影响; 其次是鱼雷自导水平扇面角(SectorH), SectorH越大, 鱼雷在进行末弹道机动时丢失目标的几率就越小, 实现垂直命中的几率就越大; 鱼雷机动角速度上限(TorWymax)是在SIMULINK仿真程序中设定的约束条件, 不参与寻优过程, 因此其影响也不被衡量; 初始雷目距离(TorTarR0)、鱼雷初始航向(TorPsi0)、鱼雷初始提前角(TorEta0)决定着初始雷目态势, 它们对优化目标的影响随不同态势设定而不同, 有时是正向影响, 有时是逆向影响, 需要对每一态势划分区间进行具体分析; 优化目标相对于其他参数的灵敏度较小, 不必特别关注。
图4 最优垂直命中末弹道仿真曲线
5 结束语
本文提出了一种鱼雷最优垂直命中末弹道的设计方法, 其基本思想是在末弹道导引过程中保持鱼雷与目标的声学接触, 对基于庞特里亚金最小值原理解析求得的最优垂直命中导引律进行面向工程应用的二次优化设计。这样可以得到适用于不同初始作战态势的一组最优导引律, 仿真表明这一方法是可行的, 并获得了一致性良好的优化结果。文中还进行了末弹道优化系统的灵敏度分析, 指出了影响最优垂直命中末弹道设计的主要因素, 为重复优化或改进优化提出了建议。
[1] 李志舜. 鱼雷自导信号与信息处理[M]. 西安: 西北工业大学出版社, 2003.
[2] L.D.伯科维茨. 最优控制理论[M]. 上海: 上海科学技术出版社, 1985.
[3]刘豹, 唐万生. 现代控制理论[M]. 三版. 北京: 机械工业出版社, 2006.
[4] 韩京清. 最优导引律[J]. 航空学报, 1979, 14(1): 83-90.
[5] 王朝珠. 带有不确定因素的最优拦截制导律[J]. 航空学报, 1983, 4(4): 70-77. Wang Chao-zhu. An Optimum Intercept Guidance Law with Uncertain Factors[J]. Acta Aeronautica Et Astronautica Sinica, 1983, 4(4): 70-77.
[6] 詹致祥. 考虑一阶环节和法向约束的最优导引律[J]. 航空学报, 1986, 7(3): 291-297. Zhan Zhi-xiang. Optimal Guidance Law wih First Order Lag Loop and Normal Constraint[J]. Acta Aeronautica Et Astro- nautica Sinica, 1986, 7(3): 291-297.
[7] C.J.贝茨. 攻击机动目标的最优制导规律[M]. 北京: 宇航出版社, 1989.
[8] 詹致祥. 鱼雷制导规律及命中精度[M]. 西安: 西北工业大学出版社, 1995.
[9] 王振国. 飞行器多学科设计优化理论与应用研究[M]. 北京: 国防工业出版社, 2006.
附表 表3 全参数灵敏度分析
Table 3 System sensitivity analysis with full parameters
Optimization Design of Perpendicular Hit Terminal Trajectory for Lightweight Antisubmarine Torpedo
NIE Wei-dong, GAO Zhi-yong, LIU Yan-bo
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China)
Although it is more theoretically perfect and compendious than other guidance laws, the optimal perpendicular hit terminal guidance law based on Pontryagin′s minimal principle is more difficult to be applied directly to lightweight antisubmarine torpedo trajectory design for its idealization and indeterminate control coefficients. Accordingly, a practical optimization method is introduced into perpendicular hit terminal trajectory design for a lightweight antisubmarine torpedo in this paper. In this method, engineering-oriented secondary optimization is performed on the guidance law mentioned above to gain optimal guidance laws for different initial operation postures. Digital simulations demonstrate the feasibility and reliability of the proposed method. In addition, the design sensitivity of the terminal trajectory optimization system is analyzed, and suggestions about the optimization design are offered.
lightweight antisubmarine torpedo; perpendicular hit; Pontryagin's minimal principle; terminal trajectory optimization; guidance law
TJ630.2
A
1673-1948(2012)01-0001-08
2011-05-23;
2011-09-02.
聂卫东(1972- ), 男, 博士, 研究方向为系统建模与仿真.
(责任编辑: 陈 曦)
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
小哥白尼(军事科学)(2021年8期)2021-11-22
小哥白尼(军事科学)(2020年8期)2020-05-22
电子制作(2019年15期)2019-08-27
电子制作(2019年7期)2019-04-25
冰雪运动(2016年5期)2016-04-16
制导与引信(2016年3期)2016-03-20
海军航空大学学报(2015年1期)2015-11-11
弹箭与制导学报(2015年1期)2015-03-11
筑路机械与施工机械化(2014年8期)2014-03-01
