
一种浮空器雷达公路航路图积累方法
2012-06-10 03:25沈静波
中国电子科学研究院学报 2012年4期
刘 扬,沈静波
(中国电子科技集团公司第38 研究所,合肥 230088)
0 引 言
浮空器雷达作为雷达应用的一个重要方向,凭借其可以长期浮留在空中低空视野大的特性,近年来被用于重点发现“低慢小”目标[1~4],填补常规雷达的低空探测盲区。通过浮空器载体让雷达升空,可以扩大雷达的可视范围,但同时也带来了地面杂波和动目标的干扰问题[5~7]。特别是公路上高速行驶的汽车及铁路上的火车等,这些目标的速度可能和慢速飞行目标速度相近,极易成为虚假目标,对雷达关注的目标探测造成干扰。而公路航路电子地图往往存在一定的误差,或者不能及时更新新建的公路,不能反映实时动态更新带来的变化。为了更好地满足用户的需求,提高雷达的实用性,提出了一种浮空器雷达公路航路积累方法,可以实现实时更新的、与雷达特征匹配的公路航路图积累,剔出地面动目标点改善终端画面,辅助操作员快速判别目标情况,提高操作员对目标的辨别能力。
1 公路航路图积累原理
1.1 总体思路
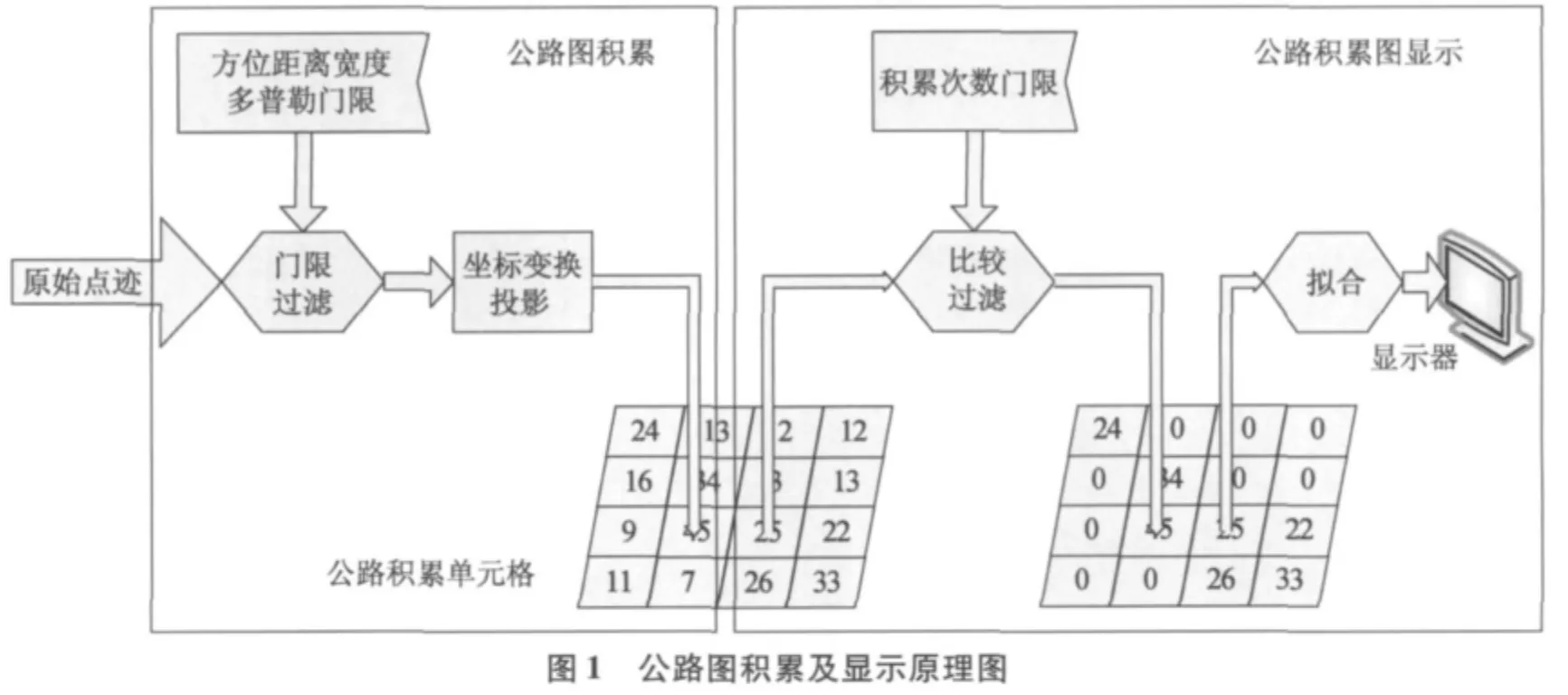
首先,将雷达威力范围大小作为公路航路图积累的空间范围,根据积累精度要求把雷达探测威力范围划分为一定大小的空间单元格,假设有N ×N个单元格,每个单元格Uij(i =1,2,…N;j =1,2,…N)代表一定的大小距离单元,给每个单元格分配一个积累次数计数器Cij,所有的单元格构成一幅积累图,初始状态是一幅原始空白图,Cij=0(i =1,2,…N;j=1,2,…N)。在雷达实时工作过程中,将信号处理后的原始点迹信息作为积累的基本输入,设置一定的方位距离宽度门限与多普勒频移门限,可以提取出符合要求的动目标点迹,将原始点迹中的方位宽度、距离宽度及多普勒频移参数进行过门限取舍,将满足条件的原始点迹进行统计,作为积累基本单元点,设其距离方位仰角为(r,α,β);结合GPS 定位信息将积累基本单元点位置(r,α,β)进行坐标变换,转换到站点坐标系下形成探测点三维坐标(x,y,z),通过投影将点(x,y,z)投影到累积图中找到该点对应的单元格Uij,每次有满足条件的点出现时,对应单元格积累次数计数器Cij增加1,以累积落入该单元的点迹,经过一定长时间的积累,公路上或航路上的目标点迹信息可以形成连续的条带分布。
需要注意的是,参与公路图积累的点迹多普勒频移限制在90 以下,高度限制在200 以下,确保参与积累的点主要是公路动目标,同理参与航路积累点门限参数设置与民航目标点特征对应。
1.2 公路航路拟合方法
对积累形成的点迹分布,剔除野值后,通过曲线拟合的方法形成公路航路图曲线,这里采用局部多项式拟合的方法,该方法符合公路航路的特点。局部多项式拟合是近年来发展的一种非参数高精度的非线性方法,其基本思想是对函数的每一局部用多项式近似,然后一般用加权最小二乘法实现待估函数的拟合,此方法可以描述为:对于给定的x,认为f(x)在x 附近的局部邻域是近似线性的,对x 附近的那部分数据应使用线性回归技术,而该局部邻域的大小由窗宽来控制,这样局部线性回归估计只需要估计两个参数,而不是一系列参数。
假定f(x)在x=x0处p+1 阶导数存在,假设已有样本(X1,Y1),…(Xn,Yn),要估计f(x0),f′(x0),…,f(p)(x0)。为此,先将f(x)在x =x0处泰勒级数展开,并整理得

进一步整理可以得到下式

式中,Kh(·)=K(·/h)/h,K(·)为核函数。
这里,取p =1,式(2)可以写出矩阵形式Y =Xβ+ε,式中

这里β 为参数向量,ε 为模型误差向量,加权最小二乘解为:β^=(XTWX)-1XTWY

取hn=cjhmin,c =1.1,hmin=(Xmax-Xmin)/2,可以调节非负整数j 的值得到满意的窗口参数值,其中j=0,1,2,…。
以上公式中(X1,Y1),…,(Xn,Yn)代入积累的公路或航路的坐标值,并选择适当的积累条带集合作为局部拟合的输入,可以拟合出公路或者航路曲线。
根据上述思路,公路图累积、拟合及显示流程如图1 所示,航路图累积、拟合及显示流程如图2 所示,其中公路图的累积方法也适用于对铁路图的累积。

2 工程设计实现
根据上述的公路航路积累原理,设计出公路航路图积累的具体的实现流程,流程图如图3 所示,具体的流程见2.1 节的积累流程步骤说明(1)~(10)。
2.1 公路航路积累流程
公路航路积累的流程图,如图3 所示。对于点迹积累的具体步骤,作以下说明。
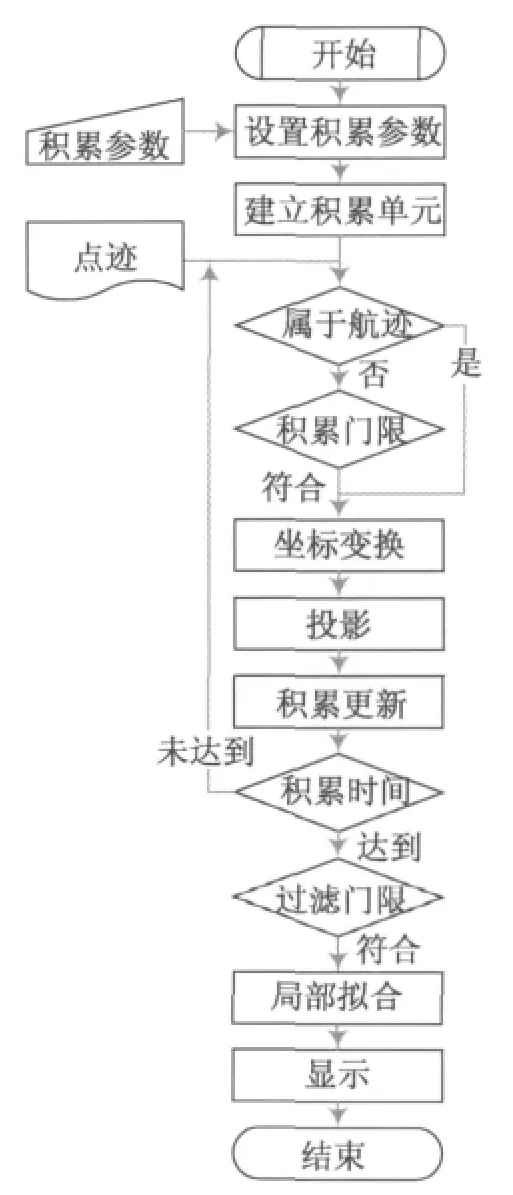
图3 积累流程图
(1)公路航路积累开始之前,用户输入积累相关的参数,包括:积累时间T,积累精度S,积累的方位门限A,距离门限D,多普勒门限F,过滤门限N等。根据用户输入的参数值进行初始化设置。
(2)根据积累精度S 设置积累单元大小,并建立公路和航路分别对应的积累单元。
(3)当有信号处理后的滤波点迹输入时,首先判断该点迹是否属于构成航迹的点迹:如果是,则直接作为航迹积累的有效点迹,进入步骤(5);如果不是,则进入下一步(4)。
(4)判断该点迹是否达到了积累设置的相关门限,包括:方位宽度Ax,距离宽度Dx和多普勒速度Fx等分别是否符合初始设置的方位门限A,距离门限D 和多普勒门限F 等积累参数的要求。如果符合,则作为公路积累的有效点迹,进入下一步(5);否则丢弃,不做处理。
(5)运用GPS 定位信息及平台姿态信息对积累的有效点迹进行坐标变换,生成站点坐标系下的三维坐标值。
(6)对坐标变换后的点迹位置进行投影,根据点迹的三维坐标计算对应的积累单元。此处,可以使用点迹的方位宽度Ax和距离宽度Dx进行投影变换,根据方位宽度和距离宽度计算具体的投影范围,从而计算出所有需要积累的积累单元。
(7)对所有需要积累的积累单元进行更新操作,将对应积累单元的积累次数增一。
(8)判断当前是否达到用户初始设置的积累时间:如果尚未达到,则返回步骤(3)继续积累;如果已经达到,则进入下一步(9)。
(9)将每个积累单元的积累次数Ni,j和用户设置的过滤门限N 对比:如果Ni,j>N,则该积累单元是有效积累单元;否则,则是无效积累单元。
(10)将有效积累单元进行野值剔除、局部多项式曲线拟合、形成曲线段,叠加显示在终端界面上,从而形成公路航路积累图。
2.2 实验结果
根据上述流程设计,完成了公路航路积累和显示软件设计,并在某型浮空器雷达上进行了现场实验。经过设定时间的积累,该方法可以得到雷达站附近的公路航路积累数据,积累生成的指定范围的公路分布图如图4 所示。

图4 公路积累图显示画面
通过野值剔除,局部多项式拟合后形成的公路曲线图如图5 所示,红色线段为拟合的公路曲线。
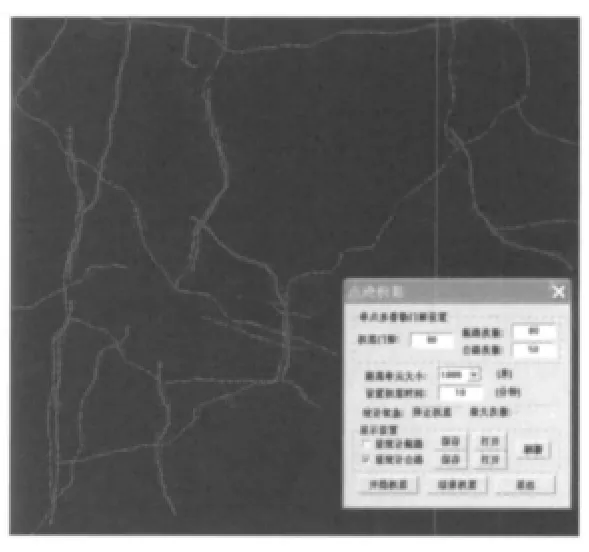
图5 局部多项式拟合的公路图
由公路曲线可知,该方法径向方向的公路积累效果很好,客观反映了该雷达对公路目标的探测情况,图5 中,黄色的公路电子地图与红色的拟合公路曲线存在一定的偏差,拟合的曲线更符合该雷达的实际探测情况,可以用拟合的曲线代替或纠正对应电子地图。图5 中,同时还存在部分拟合曲线没有对应的电子地图,这是客观存在的公路,而电子地图上没有该路段的信息,统计图弥补了电子地图的缺失。
实验还进一步应用积累生成的公路图,对雷达点迹进行处理,设置一定的门限,将坐标重叠在积累图中公路上的点迹自动剔除或不让其参与航迹起始和相关,从而达到抑制地面动目标的目的。实验结果如图6、图7 所示,把同一区域不使用积累图剔除点迹的终端显示情况与使用积累图剔除点迹的终端显示情况对比,图6 存在大量的地面动目标航迹,图7 中大量的地面动目标航迹被剔除,结果表明这对改善雷达显示和情报质量起到了非常重要的作用。


4 结 语
针对浮空器雷达地面杂波、公路铁路上的动目标容易对操作员关注空中“低慢小”目标造成干扰问题,以及公路航路电子地图存在误差和缺漏不能准确帮助操作员进行目标判定的问题,提出了一种实时的浮空器雷达公路航路积累方法。该方法根据雷达本身的探测特性,实时积累出公路铁路以及航路图。详细阐述了积累方法的原理,同时给出了工程设计实现。在某实装浮空器雷达装备上实验结果表明,运用该方法积累的公路、铁路及航路图,可以帮助操作员快速准确判别目标情况,及时丢弃公路铁路上的动目标,集中精力关注空中目标,从而改善雷达终端显示和情报质量,使雷达装备能够更好地满足用户的需求,提高了装备的实用性。
[1]曹洁. 国外系留气球的发展和应用[J]. 科技资讯,2010,25:6-7.
[2]陈昌胜,赵攀峰. 系留气球载雷达系统分析[J]. 雷达科学与技术,2007,5(6):410-414,469.
[3]MARTIN S. Radar Aerostats Provide Cost-Effective Platform for Enhanced Observation[M]. Jane's International Defense Review,2005.
[4] MA S,ZHANG C,LIU D. Technique Project of Radar Information Netting Based on Aerostat-Borne Radar[C]//IEEE International Symposium on Industrial Electronics,2009:444-448.
[5]赵伏贤,李桂祥. 球载雷达的杂波分析[J]. 舰船电子工程,2008,28(10):112-115.
[6]战立晓,汤子跃,朱振波,等. 气球载雷达云雨杂波建模与仿真[J]. 雷达科学与技术,2010,8(1):15-19.
[7]康猛,王春花,赵磊,等. 一种新的球载雷达运动目标检测方法[J]. 信息化研究,2010,36(6):30-32,48.
[8]REN QING-AN,LI XIAO,WENG YANG,et al. General Methods to Transform Unreliable Scores of Predicted Exons to Probabilistic Scores[C]//DCDIS-B(S4)2007:220-224.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
无人机(2020年1期)2020-07-20
火力与指挥控制(2020年2期)2020-04-02
铁道通信信号(2020年10期)2020-02-07
读与写·教育教学版(2019年12期)2019-12-31
无人机(2019年1期)2019-09-10
中国交通信息化(2018年4期)2018-08-21
科学与财富(2017年9期)2017-06-09
北京航空航天大学学报(2016年7期)2016-11-16
海军航空大学学报(2015年3期)2015-11-11
