
单目摄像机成像系统的设计及其研究
2012-07-09 00:39周云龙王雪亮
东北电力大学学报 2012年1期
周云龙,王雪亮
(1.东北电力大学能源与动力工程学院,吉林吉林132012;2.东北电力大学自动化工程学院,吉林吉林132012)
计算机视觉[1]是计算机实现人的视觉功能-对客观世界三维场景的感知识别和理解。立体成像系统是3D显示测量系统的关键部分,相当于人的“眼睛”,用来获取流场的图像信息并传送到计算机进行处理。原始图像越接近实际情况,经过图像处理得到的结果将会越可靠,科学家们从仿生的角度提出了类似人眼视觉的双目视觉或立体视觉系统。立体视觉是仿照人类利用双目线索感知距离的方法,实现对三维信息的获取,实际上实现上一般都采用两台或多台摄像机对同一事物从不同位置成像,从视差中恢复距离信息。在机器视觉系统中,双目立体视觉的成像主要有两种方法,一是利用双摄像机从不同的角度获取周围景物的两幅数字图像,而是由单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像。而单目立体视觉传感器是通过利用实验装置来达到双目摄像机成像系统[2]功能,其精度也能基本达到要求。
在对气液两相流体[3]中的气泡进行研究时,为了提取气泡的参数及研究其在流体中的变化,利用摄像机进行拍摄并用图像处理的方法进行检测是一种重要的研究方法。此方法的关键在于对摄像机内外参数的标定[4],目前基于透镜标定的方法有很多种,例如Tasi方法、Martins的两平面方法,张正友法[5]等等。张正友法是一种新的、灵活的方法,此方法具有很好的鲁棒性,又不需要昂贵的精制标定块,推进在他在实验室中的应用[6]。目前本课题主要是对实验装置进行了设计,对单目立体视觉成像系统在实验中的可行性进行了检验,后续将对摄像机的标定进行深入的研究。
1 单目立体视觉传感器的原理
单目立体视觉传感器[7]由一台高速摄像机和平面镜反射组合台组成,测量示意图如图1所示,M1、M2是一对固定的平面镜,两片镜子夹角为90度,反射面在外侧。P1、P2为两组可平移的平面镜,反射面在内测,它们的位置与中心线的距离为d,和水平基准线的夹角为Ф。被拍摄物置于传感器前方,并调整它位置使其在传感器的有效视场里。该单目立体视觉传感器实现的原理本质上是利用平面镜反射组将一幅图像经过反射形成两幅虚像,从而在一个CCD像面上得到了被测对象在两个方向上的二维信息,经过图像分割,得到两幅图像,利用特征提取、立体匹配等算法提取深度信息,该被测物在空间上实现三维重构奠定了基础。
为了建立单目立体视觉传感器的成像模型,定义参数如下:
(1)传感器系统中结构参数定义
f:透镜焦距;
β:摄像机透视中心对CCD像面的张角;
γ:两组反射镜之间的夹角;

图1 单目传感器结构图
α:反射镜M1、M2之间的夹角;
h1:摄像机与反射镜组M1、M2之间的垂直距离;
h2:两组反射镜之间的交点与反射镜M1、M2间的距离;
h:空间坐标平面xoy距离反射镜M1、M2的距离。
(2)光路分解后对应的双目立体视觉系统中的结构参数定义
B:摄像机两个虚像之间的基线距离;
θ:光轴虚像与Z轴之间的夹角;
h0:有效视场相对于第一组反射镜的最近距离;
△h:有效视场的深度。
(3)坐标系定义
(x,y,z):被测物所在的三维空间坐标系,o为坐标原点;
(Xl,Y1):CCD右半像面对应的二维坐标系;
(X2,Y2):CCD左半像面对应的二维坐标系;
(x1’,y1’,z1’):以虚光轴与平面xoy的交点O1’为坐标原点,以O1’O1为z1’轴建立的坐标系;
(x2’,y2’,z2’):以虚光轴与平面xoy的交点O2’为坐标原点,以O2’O2为z2’轴建立的坐标系。

图2 单目立体视觉传感器结构示意图
通过分析可知:参数f、β、γ、α、h1、h2反映了摄像机与反射镜之间的位置关系,决定了单目视觉传感器的整体结构,也决定了映射过程中各坐标系之间的关系。
根据图2分析传感器的成像原理,被测物在有效视场内经对称角度方向分别通过两组反射镜的光路折叠,映射到CCD摄像机的左、右半平面中,使其充当了双目的角色。传感器中的两个虚像面如图2中的放置方法,光轴与Z轴的夹角θ远远大于张角β,有效视场在水平方向和深度方向都周所以此传感器适合近距离测量。
2 单目立体视觉传感器硬件实现

图3 中央平面镜固定装置
在确定出传感器的结构上的理想参数后,在制作过程中主要考虑传感器的精度[8]和灵活性。在实验过程中,要有很高的可调性,尽量减少平面镜的垂直误差。装置主要包括三个部分:中央平面镜固定装置、两侧平面镜可调装置以及水平台座。如图3所示,中央平面镜固定装置为一直角水平座,中间设计为两条4 mm宽的直角沟槽,槽深为20 mm,槽身两侧分别各开两个螺旋孔,通过螺旋孔来调节玻璃的垂直度,在槽两侧也开有六个螺孔,对应水平台座,达到固定的目的。两侧平面镜可调装置,如图4所示,它的一端开有一个螺孔,配合水平台座上的沟槽能够水平移动的同时又能水平转动,实现两个方向上的灵活性,这样便可以扩大有效视场的范围,使操作在实验过程中所受的约束大大减小。侧边平面镜装置也开有4 mm宽,20 mm深的沟槽,在加工的时候要保证槽底的水平度。水平台座,如图5所示,台座长500 mm,宽350 mm,厚10 mm,使用亚克力材料加工而成,两侧平面镜装置能固定在上面并能沿沟槽左右移动和转动,而中央平面镜装置固定在上面不动。

图4 两侧平面镜可调装置
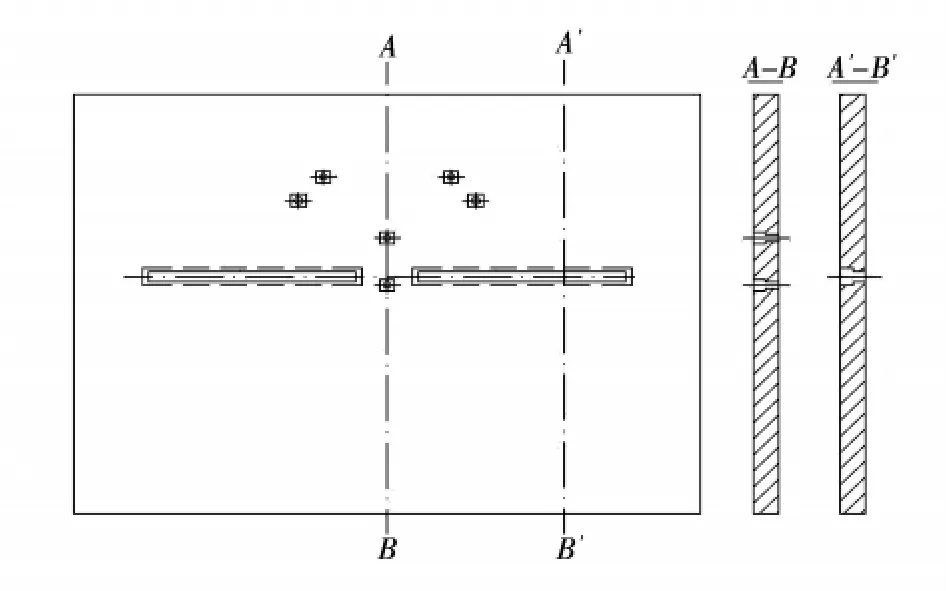
图5 水平承载台
3 实际应用
此实验装置主要目的是提取两相流体中气泡的参数,对气泡在两相流体中的运动机理进行研究,在进行实验前,首先要对摄像机进行标定,我们应用了此系统对标定板进行了拍摄,图6即为此系统拍摄标定板图像,从而可以看出拍摄的图像较为清晰,达到了应有的效果,可以根据拍摄图像进行标定。

图6 摄像机拍摄靶标图像
处理靶标图像的过程如下:
(1)图像去噪;
(2)根据直方图,找到峰峰间的谷值作为阈值进行二值化;
(3)图像反色;
(4)用图像标记算法进行目标标记,并显示为彩色索引图像,如图7。

图7 靶标处理图像示意图
由图7可见,处理后的图像效果清晰,符合实验要求,我们可以根据图像计算标记物的质心坐标,经过坐标变换后,对摄像机进行标定,后续便可以对两相流体中的气泡进行拍摄,提取气泡特征参数,根据参数实现三维重建。
4 结 论
实验表明,单目立体视觉成像系统完全能够达到双目成像系统的效果要求,较清晰的拍摄到了图像,我们可以根据拍摄到图像,应用图像处理的方法,如滤波、去噪后得了更加清晰的图像。本课题对实际机械进行了具体的设计和加工,完成了整套系统的开发,并通过实验获得了清晰的靶标图像,验证了系统的价值。
[1]马颂德,张正友.计算机视觉[M].北京:科学出版社,1998.
[2]朱效明,高稚允.双CCD立体视觉系统的理论研究[J].光学技术,2003,29(3):298-30.
[3]周云龙,洪文鹏,孙斌.多相流体力学[M].北京:科学出版社,2008.
[4]张广军.机器视觉[M].北京:科学出版社,2005.
[5]Z.Zhang.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern.Analysis and Machine Intelligence.2000,22(11):1330-1334.
[6]闫丽.气液两相流场中气泡行为3D测量关键技术研究[D].天津:天津大学,2006.
[7]S.J.Haam,R.S.Brodkey.Motions of dispersed beads obtained by particle tracking velocimetry measurements PartⅡ[J].International Journal of Mu1t1phase Flow,2000(26):1419-1438.
[8]闫丽,段发阶.单目立体视觉传感器的优化设计及精度分析[J].传感技术学报,2006,19(2):349-352.
猜你喜欢
新能源科技(2022年9期)2022-11-20
中学生数理化·八年级物理人教版(2022年10期)2022-11-10
中学生数理化·八年级物理人教版(2021年10期)2021-11-22
中学生数理化·八年级物理人教版(2020年10期)2020-11-26
环境技术(2020年1期)2020-03-06
中学生数理化·八年级物理人教版(2019年10期)2019-11-25
中国惯性技术学报(2019年1期)2019-05-21
电子制作(2018年12期)2018-08-01
北京航空航天大学学报(2017年4期)2017-11-23
光学精密工程(2016年6期)2016-11-07
