
高速综合检测时空同步技术
2012-07-13 08:53王登阳杨超
铁路技术创新 2012年1期
■ 王登阳 杨超
高速综合检测列车轨道、牵引供电、通信、信号等基础设施相互之间关联性强,影响因素多。高速综合检测时空同步技术实现了一整套对检测数据进行综合分析、评价提供技术支撑的多系统时间里程同步采集发布系统,为多专业检测数据融合智能分析奠定基础。通过系统的定位试验,验证了系统的定位精度,证明时空同步技术为高速综合检测列车运行过程中的时空同步提供了一个较为有效的解决方案。
1 时空同步技术概况
高速铁路现阶段主要采用高速综合检测列车进行铁路基础设施的综合检测。高速综合检测列车上有多个专业的检测系统,分别对轨道几何状态、加速度、轮轨力、接触网、通信、信号等进行动态检测。高速铁路基础设施系统复杂,为了保障行车安全、提高运输效率、降低运营成本,需要通过综合数据分析,对高速综合检测列车检测数据及基础设施状态变化规律做出评价,为高速铁路运营安全评估和指导养护维修提供技术支撑。
参与动态检测的所有专业拥有统一、精确的时间里程信息,是进行线路基础设施检测数据综合分析的前提和基础。高速综合检测时空同步技术即是在综合检测列车上解决里程精确定位问题,为各个专业提供统一实时里程、时间同步等基础信息的关键技术之一。时空同步技术包括里程定位和时间同步2个技术要点,国内外高速综合检测列车采用的定位技术主要有以下几种:
1.1 里程累加技术
(1)基于速度编码器的里程累加定位技术。里程累加计距所需的脉冲信号通过安装在列车轮对轴头的光电编码器提供。列车行驶过程中,光电编码器和车轮以相同角速率转动,列车行驶距离可通过采集、累计脉冲信号获得。但是,利用速度编码器对行车距离进行累加的误差随时间逐渐增大,并由于存在长短链、车轮空转、滑行、磨损等多种情况,单纯的速度编码器累加不能对线路里程进行精确定位,必须辅以其他里程修正技术。
(2)基于多普勒雷达测速的定位技术。利用多普勒雷达获得列车行驶速度,利用陀螺仪获得列车在三维空间中各个方向的加速度,通过积分合成计算列车行驶距离。基于多普勒雷达测速的定位技术与速度编码器定位技术一样,存在累加误差,必须辅以其他里程修正技术。
1.2 里程定位技术
(1)基于应答器的定位技术。基于应答器的定位技术是目前广泛采用的列车定位方法。应答器按照规定距离安装于轨道中心线上,列车通过应答器上方时,车载应答器接收天线获取到应答器信息(包含位置信息),完成对列车的定位。基于应答器的定位技术优点是定位精度高、使用寿命长、维护成本较低、在恶劣环境下可保证良好的稳定性;缺点是只能获得应答器所在位置的定位信息,必须辅以速度编码器或多普勒雷达测速定位技术才能完整定位线路里程。新线联调联试过程中,应答器设备未调试完成,不能作为检测列车的定位信息源使用。
(2)基于GPS的定位技术。GPS定位技术是通过卫星对地面目标进行测定并进行定位和导航的技术。GPS定位技术具有使用方便、技术成熟、成本相对较低、维护容易等优点。因此,GPS定位技术也是现阶段检测列车广泛采用的定位技术之一。但GPS在山区、隧道、车站等遮挡区段会完全失效,且定位精度受卫星星况、天气气候等因素影响较大。
(3)基于RFID的定位技术。RFID无线射频技术作为一种新兴的定位手段,已较广泛应用于各种领域,尤其在物流管理领域应用非常广泛。RFID技术在我国铁路货车追踪、货车车号自动识别等方面也早已得到应用,并趋于成熟。基于RFID的定位技术原理与应答器定位技术相似,但RFID标签具有尺寸小、安装方便等特点。因此,更适合在高速综合检测列车上进行精确定位。
除以上所述方法外,无线测距、惯性导航等其他定位技术在列车的定位系统中也得到应用。
1.3 时间同步技术
时间同步目前最通用的方法是利用GPS时钟授时,先将网络中一台计算机的时钟与GPS时钟同步,再将这台计算机作为时间服务器,网络内的其他设备基于网络时间协议(Network Time Protocol)或精密时钟同步协议(Precision Timing Protocol)与其进行时间同步。时间服务器输出必须通过网络接口,数据输出格式必须符合时间同步协议,局域网内所有PC、服务器和其他设备通过网络与时间服务器保持同步,时间同步协议自动判断网络延时,对得到的数据进行时间补偿,从而使局域网设备时间保持统一精准。时间同步原理见图1。

图1 时间同步原理
2 综合检测时空同步技术
2.1 里程同步实现原理
目前,高速综合检测列车采用RFID定位技术、GPS定位技术做为里程定位手段,里程累加使用速度编码器定位技术,三者补充融合是解决里程定位问题的最佳手段。GPS与RFID定位优缺点对比见表1。
由于GPS与RFID定位技术各具优势,时空校准系统中两者相互补充、相互备份,速度编码器信号用于定位点间里程的累加计距和误差修正。
线路上每1~5 km设置一个定位点,采集GPS经纬度,并在定位点同一截面线路两侧接触网支柱上安装电子标签(见图2)。在每2个相邻定位点间系统利用高分辨率光电编码器进行累加计距,维持里程定位数据连续性,编码器信号累加误差随行车距离增加不断增大,系统在每个定位点处的里程校准值用来修正编码器累加误差。
2.2 时空校准系统
综合检测时空校准系统以时间可控为基本设计理念,采用精确时钟同步技术做为误差修正手段,融合高速射频、差分GSP、惯性导航及实时通信等定位手段,实现检测列车高速检测过程中的里程精确定位、信息发布、状态监控等功能。系统主要分为时间同步和里程同步两部分,主体结构设计见图3。

表1 GPS与RFID定位数据源优缺点对比

图2 定位点标签安装方式
(1)时间同步。系统采用GPS作为全车时钟同步的基础时钟源。车载检测系统由于涉及多个系统,为避免GPS时钟在通过隧道、桥梁、车站等GPS信号遮挡区段信息丢失,高速综合检测列车的时空校准系统配备高精度时间服务器提供连续、精确、守时的时间信息。
(2)里程同步。系统采用速度编码器、DGPS定位系统和高速射频电子标签技术结合的方式进行地理数据信息采集和定位。
为了减少里程同步数据的通信时延,系统使用专用实时网络进行数据的可靠传输,保证了同步数据网络延时在微秒以内。车内各检测系统PC、服务器等按照 “综合检测列车里程同步协议”与时空校准系统进行里程同步,达到全车检测系统里程的实时统一。
列车运行过程中,里程同步服务器采集实时GPS经纬度和射频标签信息,在“GPS–里程”和“RFID–里程”信息数据库中进行信息对比,当到达某个定位点时,系统软件自动匹配出经纬度和射频标签对应的线路里程,同时完成里程误差修正,获得当前列车瞬时里程值。里程同步服务器通过采集速度编码器脉冲信号,在这个里程值上进行累加计算,以维护里程值的准确性,直到下一个定位点对里程值进行再次修正。时空校准系统就是通过这样一个修正→累加→再修正→再累加的循环,始终维护列车里程定位的准确性。时空校准系统里程同步原理见图4。
时空校准系统软件界面见图5,安装在里程同步服务器上,主要功能包括整车时间同步、整车里程同步及行车信息记录。此外,服务器还具有监控各个系统客户端连接情况和正确接收报文情况等辅助功能。
2.3 系统车内布置
时空校准系统服务器及接口单元在机柜内的布置见图6,包括里程同步服务器、时空校准接口单元和时间服务器。
射频阅读器通过万向调节装置安装在两侧车窗,与车窗玻璃贴合,2个标签阅读器安装位置与车顶的定位GPS天线处于车体同一断面上。射频标签阅读器在车内安装实物见图7。定位GPS天线采用高增益双频航空专用GPS天线,天线安装在车顶位置(见图8)。
3 定位精度验证
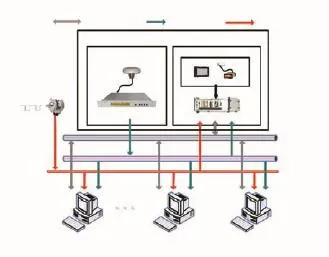
图3 时空校准系统整体结构设计

图4 里程同步原理
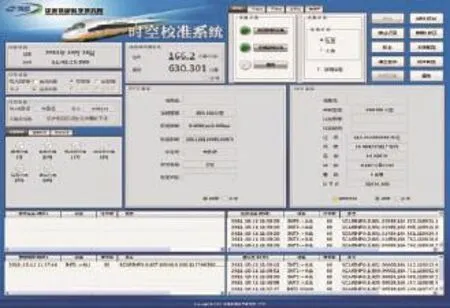
图5 时空校准系统软件界面

图6 时空校准系统机柜布置图
2011年3月4日—5月3日,系统在京沪高速铁路先导段(徐州东—蚌埠南)进行了最高速度350 km/h定位精度验证试验,试验在380A-001高速综合检测列车上完成。试验过程中,检测车车内轨道检测、动力学检测、接触网检测、信号检测等系统采用里程精确定位系统进行里程同步。
为了验证高速状态下的系统定位精度,试验采用了激光触发装置。试验在上行线K756+209及K756+004 2处接触网杆上安装射频标签,作为精度验证A、B 2个试验点,安装高度为轨面以上2.2 m;在2处试验点间,上行线K756+102处接触网杆上安装激光发生器试验装置,安装高度为轨面以上2.35 m。车内激光接收位置与标签阅读器在同一列车定位截面。经现场实际测量得到:激光发生器与A、B 2个试验点的精确间距分别为109.1 m和95.7 m,测量误差≤0.1 m。
当列车高速经过A、B 2个试验点及中间激光器基准点时,标签阅读器和激光发生器信号采集见图9。列车经过A或B两点时系统自动定位出试验点里程,并在此里程基础上根据光电编码器信号进行里程累加。激光触发装置在接收到激光光束的瞬间发出触发脉冲,驱动计数器停止里程累加,从而得到列车从射频标签到激光发生器处的定位距离。整个激光触发过程由硬件板卡完成,延时误差忽略不计。
列车以不同速度(50、150、200、250、300、350 km/h)通过试验点和激光器,系统定位的行车间距与实际值对比,从而验证系统的定位精度。试验数据结果见图10。
图10是各速度级下时空校准系统定位的A、B 2个定位点到基准点的“距离-速度”曲线。曲线描述了列车以不同速度级正反向通过K756—K757试验区段数次。从图中可以看出,列车正反向通过A、B 2个定位点和基准点数次,每次获得的定位点到基准点距离曲线与实测距离基本吻合,定位最大误差<0.3 m。
4 结论
综合检测时空同步技术首次实现了400 km/h条件下的精确定位,定位精度达到1 m,极大提升了国内检测列车装备的技术水平。

图7 车内射频阅读安装完成图

图8 车顶GPS天线安装完成图
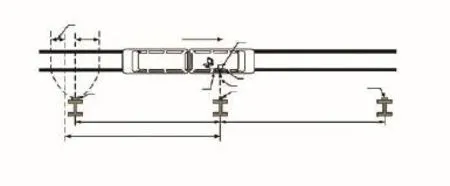
图9 射频标签试验验证示意图
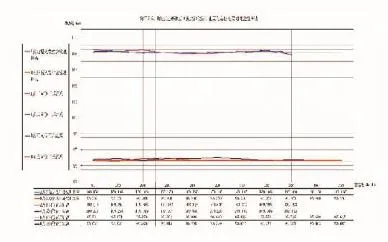
图10 系统定位修正后两点距激光器与实际距离对比验证曲线
目前,时空校准系统已经在CRH380A-0150C、CRH380A-001、CRH380B-002、0号、CRH2-061C等多辆高速综合检测列车上使用。在京沪高速铁路联调联试及日常检测中取得了较好的应用效果。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
汽车实用技术(2022年14期)2022-07-30
今日农业(2021年7期)2021-11-27
保健医苑(2021年9期)2021-09-08
煤炭工程(2019年6期)2019-06-22
中国铁道科学(2019年1期)2019-02-19
中国设备工程(2018年14期)2018-08-09
制造技术与机床(2017年7期)2018-01-19
车迷(2017年12期)2018-01-18
中共南昌市委党校学报(2017年1期)2017-05-04
