基于PSO-BP神经网络的PID控制器参数优化方法
2012-07-13 03:06郭珂,伞冶,朱奕
电子设计工程 2012年4期
郭 珂, 伞 冶, 朱 奕
(哈尔滨工业大学 黑龙江 哈尔滨 150001)
从1922年米诺尔斯基提出PID控制器至今,PID控制一直是自动控制领域中生命力最强、应用最为广泛的基本控制方式。随着科学技术的发展,涌现出越来越多新的先进控制方式,然而直到现在PID控制依然广泛应用于机电、石油、化工、热工、冶金等各个领域,尤其是底层的工业生产过程控制[1]。这是因为PID控制不仅具有算法原理简单,稳定可靠,易于实现,适应能力强,对模型参数摄动具有较好的鲁棒性等优点而且物理意义明确直观易于理解[2]。PID控制系统的控制效果几乎完全取决于控制器参数的选择,因而其参数的整定和优化具有重要意义。
传统整定优化方法有专家法、响应曲线法、Ziegler-Nichols法[3]、理想继电特性法等。这些方法一般用于控制开始之前的PID参数离线预整定,虽然有一定的鲁棒性,但对系统动态性能利用很少,因而设计出的控制器性能往往很难达到最优。而且整定后的参数通常不再改变,灵活性差,面对实际对象中存在的各种不确定性、非线性和复杂多变的工况就显得无能为力了。因而人们对具有参数在线自整定功能的PID控制器提出了迫切需求,以适应复杂多变工况下的高性能指标的要求。随着人工智能和机器学习理论的迅速发展,出现了许多智能参数整定优化方法并且取得了一定的效果,如模糊、遗传算法、粒子群[4]、神经网络等各种PID参数整定优化方法。其中,模糊PID控制系统性能的优劣取决模糊规则和隶属度函数的选取,而这又严重依赖于设计者对控制回路特性知识了解的丰富程度。遗传算法对搜索空间适应能力差,易出现早熟收敛,从而降低了PID参数寻优的效率。神经网络由于具有自组织、自适应、自学习、鲁棒性强且能够以任意精度逼近任意非线性函数等优点,因而基于神经网络的PID参数整定优化一直是PID控制研究的长期热点问题之一。
针对传统PID参数整定优化过程存在的问题,结合BP神经网络自学习和自适应能力强等特点,提出采用BP神经网络优化PID控制器参数。同时为了加快BP神经网络学习收敛速度,防止其陷入局部极小点,提出采用粒子群优化算法来优化BP神经网络的连接权值矩阵。最后,给出了一个PID控制系统的仿真实例来验证本文所提算法的有效性。
1 PID控制的原理和数学描述
PID控制系统的基本结构如图1所示。
PID控制器由比例、积分和微分3个环节组成,其数学描述如下:
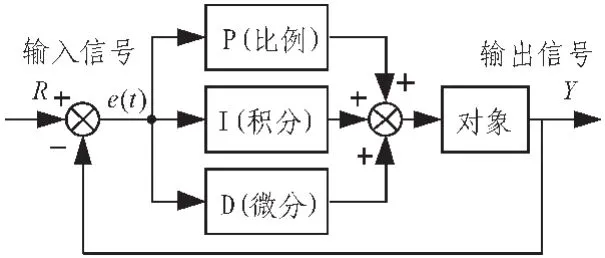
图1 PID控制系统基本结构Fig.1 Basic structure of PID control system

式中,Kp为比例系数,Ti为积分时间常数,Td为微分时间常数。
比例环节即时成比例的反映偏差信号e(t),一有偏差控制器立即产生控制作用通过负反馈使之减小;积分环节用于消除静差以提高系统的无差度;微分环节能反映偏差信号的变化趋势,从而能在偏差信号变得太大之前在系统中引入一个提前修正信号,从而加快系统的调节速度。
随着计算机控制技术的发展和广泛应用,PID控制规律越来越多的采用数字PID来实现。数字PID通常采用的是增量式PID控制算法:

式中 Δe(k)=e(k)-e(k-1),
从式(2)可以看出,增量式PID控制算法的优点是计算量小,一旦确定Kp,Ki和Kd3个参数后,只要使用前后3次测量的偏差值就可以得到控制作用输出

因而增量式PID控制要取得好的控制效果,就必须调从这3个参数变化无穷的组合中可以找出一组最佳参数。但是传统整定方法面对复杂的实际被控对象所得到的系统性能指标往往欠佳,如超调量大、调节时间长。而目前得到广泛应用的BP神经网络能够以任意精度逼近任意连续非线性函数,对于复杂不确定问题具有较强的自适应能力和自学习能力。
因此,将BP神经网络技术与PID控制相结合,可以解决PID参数不易进行在线实时整定等方面的缺陷,更大程度上发挥PID控制的优点,从而使得控制系统具有更好的鲁棒自适应能力。
2 粒子群优化算法优化的BP神经网络
BP神经网络由于其具有逼近任意非线性函数的能力,而且结构和学习算法简单明确,因而可以采用BP神经网络根据系统的状态变化自动的调节优化PID控制器参数,从而实现某一指标要求下的最优。但是BP神经网络在学习的过程中容易陷入局部极小点,而且有时会因为初始权值随机选取不佳和学习速率大小选择不当而导致收敛速度过慢。虽然有时一个局部极小点可以满足基本性能指标的要求,但这样会使得系统无法工作在最佳状态,从而影响整个控制系统的高效稳定运行。正是由于BP神经网络的这些不足之处限制了其在PID控制器参数优化中的广泛应用。粒子群优化算法(PSO)是一种全局搜索算法,其收敛速度快,算法简单易于实现,用它来优化神经网络的连接权值,可以较好地克服BP神经网络的上述不足之处,从而提高神经网络的收敛速度和学习能力。图2给出了基于PSO-BP神经网络优化PID参数的结构原理图。

图2 神经网络PID系统构成图Fig.2 PID control system based on neural networks
2.1 BP神经网络
BP神经网络是应用最为广泛的一种前馈网络,通常由输入层、隐含层、输出层构成,隐含层可以有多层,层与层之间通过权矩阵联接[5-6]。其一般网络结构如图3所示。

图3 BP神经网络结构图Fig.3 Structure diagram of neural networks
从图3中可看到,BP神经网络的输入矢量为x∈Rn,x=(x1,x2,…,xn)T,输出矢量为y∈Rm,y=(y1,y2,…,xm)T,隐层共有h个神经元。设输入层和隐层之间的连接权矩阵为W1,隐层和输出层之间的权矩阵为W2,于是各层神经元的输出为:

上两式中,f(·)通常选为Sigmoid函数。
2.2 粒子群优化算法
粒子群算法[7]的数学描述如下:
假定一个由M个粒子组成的群体在D维搜索空间中以一定速度飞行,其中第i个粒子的位置和速度分别表示为Xi=(xi1,xi2,…,xid)和Vi=(vi1,vi2,…,vid)。用pi=(pi1,pi2,…,pin)表示粒子自身迄今为止找到的最优解,pg=(pg1,pg2,…,pgn)表示整个种群迄今为止找到的最优解。粒子在找到和之后通过如下规则来更新自己的状态:


式中,r1和r2为介于之间的随机数;c1和c2为加速常数,它们表示粒子受社会知识和个体认知的影响程度,通常设为相同值。w为惯性权重因子,用于均衡粒子的全局探索能力和局部开发能力;和分别为粒子i在第t次迭代中第d维的速度和位置;为粒子i在第d维的个体极值位置,为群体在第d维的全局极值位置。Clerc[8]提出c1=c2=2.05,而Trelea[9]推导出w=0.6,c1=c2=1.7时PSO算法的性能最佳,本文就采用这组参数,同时通过实验粒子数选为20,因为粒子数太少则搜寻空间有限,太多则显得效率低下。
2.3 粒子群优化BP神经网络权值
BP神经网络的权值按照一定次序编码为粒子群中的一个粒子,而把BP神经网络的目标函数作为PSO算法的适应度函数,通过PSO算法的循环迭代来最终找到最佳的网络权值。
采用PSO训练BP网络需要确定如下4个问题。
1)BP神经网络结构确定
BP神经网络的输入节点个数和输出节点个数是由实际问题本身决定的,如在本文所研究的PID控制器参数优化问题中输入节点数个输出节点数均为3个。因而BP神经网络结构设计重点就在于隐层结构的确定,具体包括隐层个数和各隐层节点个数。隐层的结构很大程度上决定着网络的记忆容量、泛化能力、训练速度和输出响应的质量。由万能逼近定理可知,三层网络已经能逼近任意非线性函数,因而本文选用具有单隐层的三层BP网络。隐层节点数的选择与问题的复杂程度有关,隐层节点过少,学习可能不收敛,网络的知识能力和泛化能力降低。但隐节点过多,往往偏向于冗余,训练时间不收敛,不但使参数增多而增加了学习时间,而且可能使泛化能力降低,从而使整体性能变坏。本文通过经验公式和实验分析后选取隐层节点数为8个。

式中,为隐层节点数,为输入节点数,为输出节点数,为之间的常数。
2)编码策略的选取
采用PSO优化BP神经网络首先应该将网络中的权值矩阵进行编码,编码方式可以分为向量编码策略和矩阵编码策略两种。文中采用向量编码策略,每个粒子都被编码成为一个向量,这个向量由一个神经网络的所有权值按照一定规律排列而成。
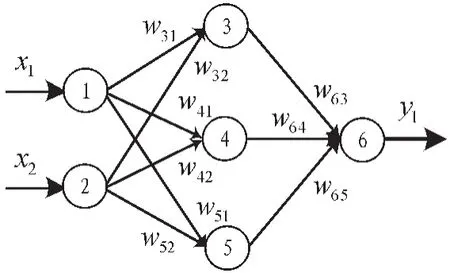
图4 神经网络向量编码策略Fig.4 Vector coding strategy for neural networks
图4示意性给出了本文所用编码方式,具体编码方式为 :particle(i)=[w31,w32,w41,w42,w51,w52,w61,w62,w63],式 中 ,i代表粒子个数,i=1,2,…,M。
3)适应度函数的选取
编码策略确定以后,就可以将BP网络的权值相应的映射为粒子的维数形式,并根据式(4)和(5)进行网络训练。在训练过程中,适应度函数即目标函数选为:

4)算法终止条件的选取
算法终止条件的选取必须同时兼顾算法的学习精度和速度,通常为达到所要求的适应度
阈值或者达到预先设定的最大迭代次数。
具体算法流程图如图5所示。
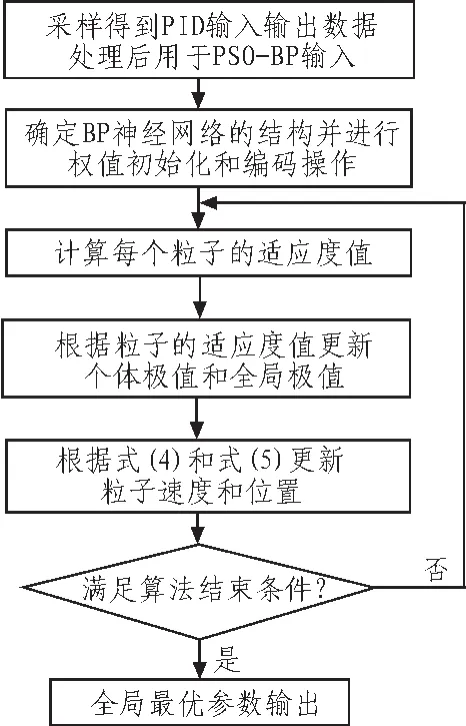
图5 PSO-BPNN优化PID参数流程图Fig.5 Flow chart of PID controller parameters optimization
3 仿真算例
为了验证本文所提方法的有效性,选定被控对象的数学模型如下:


图6 系统阶跃响应对比曲线Fig.6 Comparison of step response curves
图6给出了采用本文所提方法和基于整定方法、方法、方法得到的PID控制系统的阶跃响应曲线。从图中可以看出,本文提出的PSO-BP优化整定方法同其他3种整定方法相比,闭环控制系统的超调量和调节时间明显减小,综合性能指标是4种方法中最好的。
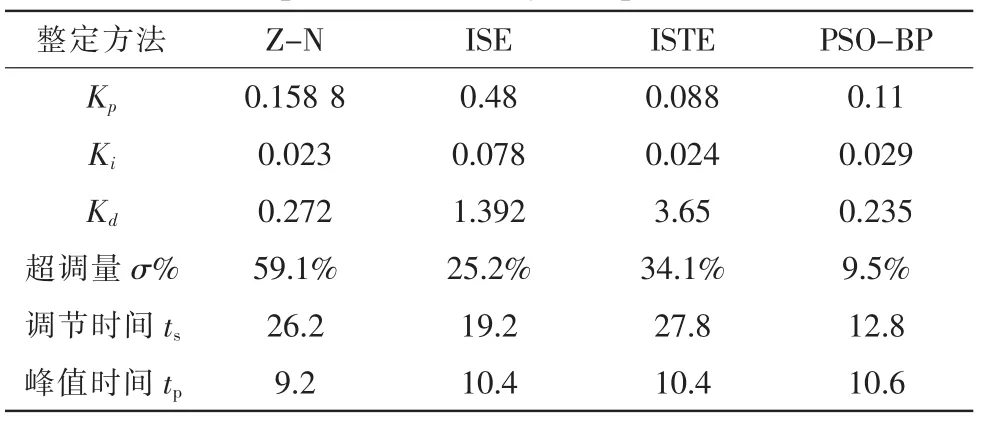
表1 PID参数及系统性能指标Tab.1 PID parameters and system performance index
表1详细给出了4种整定方法所得PID控制器参数及系统具体性能指标,通过对比分析可以得到,文中所提方法得到的PID控制器控制品质是最好的,从而验证了该方法是一种有效的PID参数整定方法。
4 结 论
传统PID控制器参数整定方法是严格基于数学模型的,因此对于具有时变、非线性的复杂被控对象很难取得满意效果。针对常规Ziegler-Nichols等常规PID整定方法的不足之处,文中提出了采用PSO-BP神经网络[10]的参数整定优化方法,并通过一个三阶模型进行了仿真验证。仿真结果表明,本文所提算法得到的PID控制器综合性能明显优于几种常规整定方法得到的PID控制器,是一种有效的PID参数整定优化方法。
[1]刘金琨.先进PID控制MATLAB仿真[M].3版.北京:电子工业出版社,2011.
[2]Knospf C.PID control[J].IEEE Control System Magazine,2006,26(1):30-31.
[3]Astrom K J,Hagglund T.Revisiting the Ziegler-Nichols step response method for PID control[J].Journal of Process Control,2004,14(6):635-650.
[4]任子武,伞冶.改进PSO算法及在PID参数整定中的应用研究[J].系统仿真学报,2006,18(10):2870-2873.
REN Zi-wu,SAN Ye.Improved particle swarm optimization and its application research in tuning of PID parameters[J].Journal of System Simulation,2006,18(10):2870-2873.
[5]丛爽,梁艳阳,李国栋.多变量自适应PID型神经网络控制器及其设计方法[J].信息与控制,2006,10(5):568-569.
CONG Shuang,LIANG Yan-yang,LI Guo-dong.Multivariable adaptive PID-like neural network controller and its design method[J].Information and Control,2006,10(5):568-569.
[6]李士勇.模糊控制·神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,1998:92-94.
[7]Kennedy J,Eberhart R.Particle swarm optimization[C].IEEE InternationalConferenceonNeuralNetworks,1995:1942-1948.
[8]Clerc M,Kennedy J.The particle swarm:explosion stability and convergence in a multi-dimensional complex space[J].IEEE Transaction on Evolutionary Computation,2002,6(1):58-73.
[9]TreleaI.Theparticleswarmoptimizationalgorithm:convergence analysis and parameter selection[J].Information Processing Letters,2003,85(6):317-325.
[10]季盛强,纪海英,辛晓虎,等.几种特征选择方法在局部放电模式识别中的应用[J].陕西电力,2011(11):1-4,9.
JI Sheng-qiang,JI Hai-ying,XIN Xiao-hu,et al.Application of several feature selection methods in partial discharge pattern recognition[J].Shaanxi Electric Power,2011(11):1-4,9.
猜你喜欢
浙江大学学报(理学版)(2022年4期)2022-07-25
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
商洛学院学报(2020年4期)2020-07-08
人民珠江(2019年4期)2019-04-20
测控技术(2018年10期)2018-11-25
铁路计算机应用(2018年5期)2018-06-01
浙江工业大学学报(2017年5期)2018-01-22
自动化学报(2017年7期)2017-04-18