基于数字高程模型的森林火灾远程视频同步跟踪算法
2012-07-30 10:40秦飞飞唐丽华
浙江农林大学学报 2012年6期
秦飞飞,唐丽华
(1.浙江农林大学 环境与资源学院,浙江 临安 311300;2.浙江农林大学 信息工程学院,浙江 临安311300)
森林为人类的生存和发展做出了无可取代的贡献,但是,全球每年发生20万次左右森林火灾,常造成严重的环境污染和经济损失。森林防火工作任重而道远。视频监控和地理信息系统(GIS)技术相结合的森林防火技术[1],既能直观地监控到火场的实时情况,又能获取火点位置的地形地貌情况及森林资源状况,是最先进的森林防火技术之一。现阶段,此技术的研究主要集中在系统研建[2-3]、资源配置[4-5]、火灾识别[6-7]等方面,但2种技术结合的关键——摄像机视域与地图数据的同步跟踪[8]的研究较少。方陆明等[9]以数字高程模型(DEM)数据为基础,利用通视性分析算法确定视频可视域的中心点,根据镜头参数提取视频可视域,证实视频可视域与摄像机的参数有关,其他关于此方面的文献并不多见。而传统方法把监控区域的地图数据进行网格化分区编码并建立数据库,使摄像机某一范围内的角度与编码关联,根据获得的摄像机的角度来检索对应编码,利用地理信息系统的渲染功能得到对应地图范围[10],计算速度快,但误差较大。本研究将采用一种新方法实现摄像机视域范围与数字高程模型(DEM)的同步跟踪。
1 实验环境
1.1 数字高程模型数据来源
数字高程模型是用一组有序数值阵列表示一定区域范围内的平面坐标及其高程坐标的实体地面模型,是对地球表面地形连续起伏变化的一种数字表达和模拟,被广泛应用于地形分析,成为空间数据基础设施的重要组成部分[11]。
本研究采用浙江省临安市三桥乡的地图数据和属性数据,其中地图数据包括行政区划图、地形图、遥感图、道路分布图,比例尺都为1∶1万;属性数据包括林场名、林班号、小班号、树种、地类、郁闭度、林龄、龄组等。将地形图扫描转换为栅格影像,利用Arc GIS 9.3对经过误差校正的栅格影像进行配准,对等高线、高程点等进行数字化采集,得到矢量地图数据格式并赋予各空间要素相应的属性,再利用Arc GIS将矢量地图数据转换为不规则三角网,线性内插建立分辨率为5 m的格网数字高程模型,与校正好的遥感图、行政区划图、小班图、道路分布图等叠加入库,作为视频同步跟踪的基础数据。
1.2 远程视频监控系统组成
远程视频监控系统主要由前端设备、网络系统、中心控制系统3个部分构成[9]。其前端设备包括摄像机、镜头、数字云台等,带参数反馈的数字云台可以实时获得摄像机的俯仰角、方位角、空间位置以及镜头的焦距,将这些决定摄像机视域范围的参数和拍摄到的图像通过网络系统传输到监控中心的软件系统,软件系统具有火灾识别、同步跟踪、火点定位、自动报警、火灾决策指挥等功能。
2 算法设计与实现
摄像机具有一定的视场角(θ),视场角与镜头的焦距(f)及感光面尺寸(水平尺寸h及垂直尺寸v)的大小有关,可用下式计算:

2.1 算法设计
2.1.1 摄像机的手电筒模型 摄像机存在视场角,其视域与手电筒光束照射在障碍物表面形成的光圈类似(图1)。摄像机的手电筒模型是依据手电筒光束照射障碍物形成光圈的过程,在坐标系统中建立摄像机视域的几何模型,如图2。视点A为摄像机的镜头,点S为摄像机中心视线与地形表面的交点(视域中心点),AS的距离为d,点E为镜头最外围视线与地形表面的交点,角θ表示视场角,设过点S且与AS垂直的平面与视线AE的交点为E′,SE′的距离为R,虚线圆表示以点S为圆心,R为半径的圆,此圆平面同手电筒光束垂直射向平面时形成的光圈影像,阴影区域即为摄像机的视域范围。本研究最终要实现此区域的同步跟踪。由于地形起伏,阴影区域不是平面,但区域内各点与视点A的所在直线必经过圆S平面。
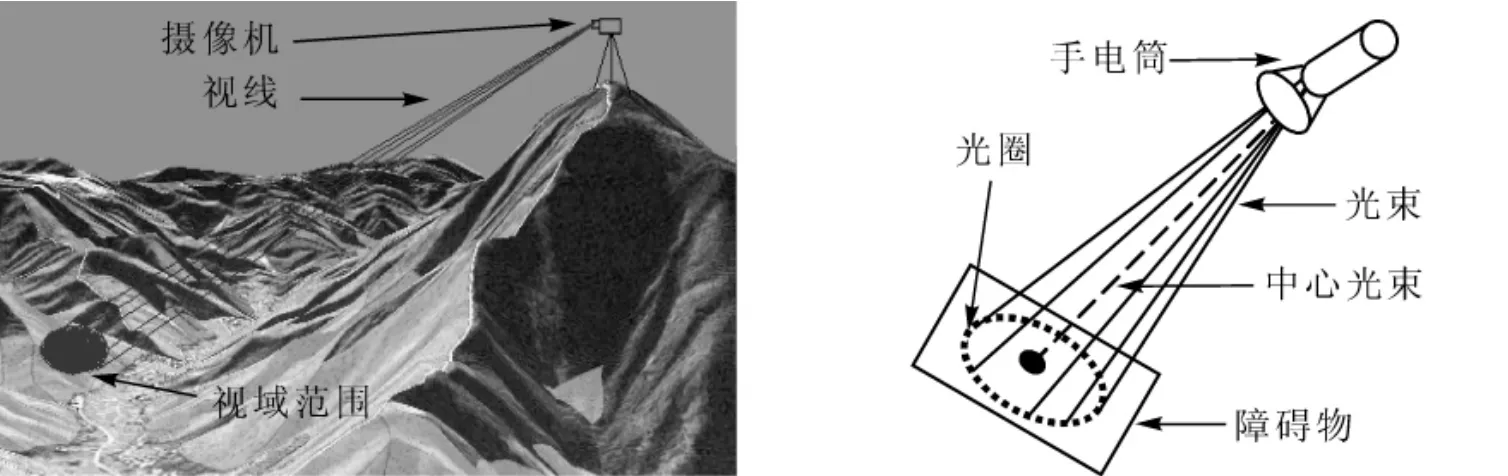
图1 摄像机的视域范围(左)与手电筒光圈(右)对比Figure 1 Contrast of video visualization domain(left) and aperture of flashlight(right)
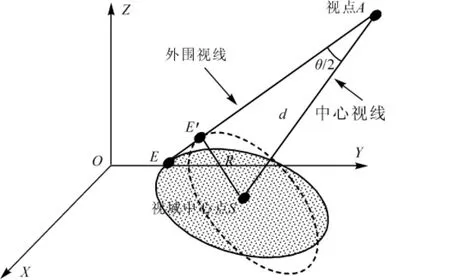
图2 三维坐标系中摄像机视域范围的简化示意图Figure 2 Simplified sketch of video visualization domain in 3D-Coordinate System
2.1.2 基于数字高程模型的同步跟踪算法设计 根据摄像机的手电筒模型设计算法如下:实时获取摄像机的参数,利用空间几何关系和Janus算法[12],确定摄像机的视域中心点;利用圆的正多边形逼近算法,对过视域中心点且垂直于中心视线的平面的边界点进行求解;再次利用Janus算法分别计算外围视线与数字高程模型的实际交点,并在数字高程模型上显示视域范围;旋转摄像机的俯仰角或方位角,重复以上步骤,实现同步跟踪。算法的基本技术流程图如图3。
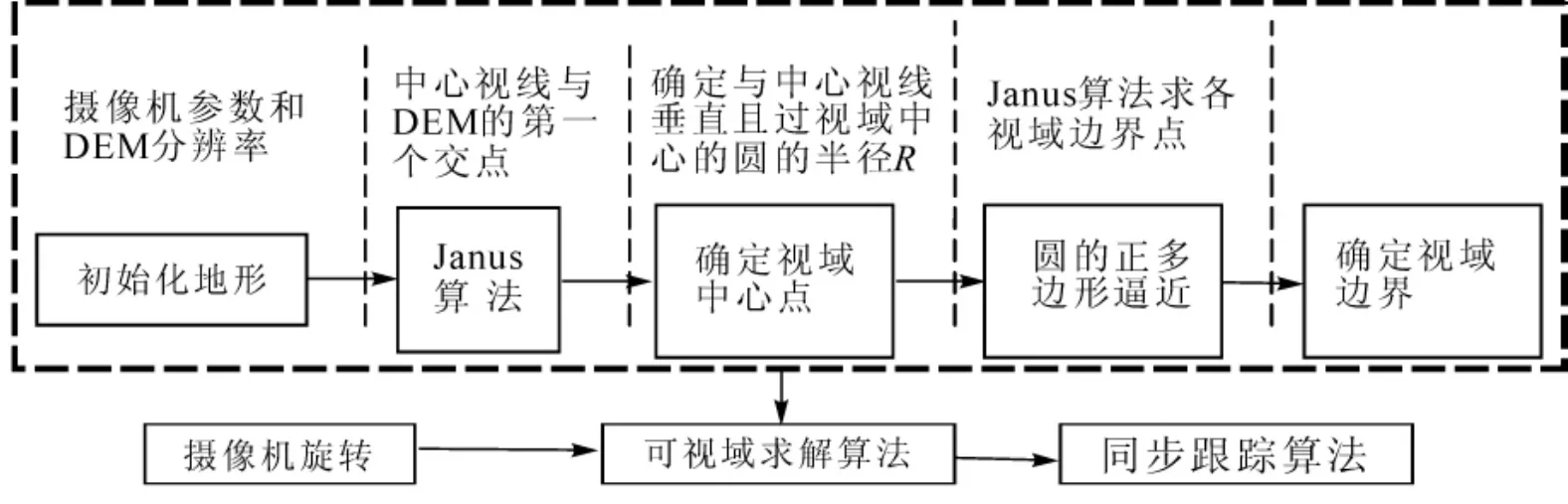
图3 流程图Figure 3 Flow chart
2.2 算法实现
2.2.1 Janus算法[12]Janus算法是格网数字高程模型常用的通视性分析算法,其基本思想是利用观察点和目标点之间X,Y坐标的最大移动量(max Δ)和数字高程模型的分辨率(m)将视线划分成step=int(max Δ/m)份,比较采用四点法内插出的划分点的地形高程值与对应视线点的高程的大小:前者小于后者,则两点通视,接着进行下一点判断;反之则不通视并返回。
2.2.2 视域中心点求解 已知摄像机的俯仰角α(取值范围为 0°~90°),方位角β(顺时针方向),空间位置即视点A(XA,YA,ZA),假设中心视线与高程为0的平面的交点为P(XP,YP,ZP),Y轴方向为正北,X方向为正东,点A′为视点在高程为0的平面上的投影点,摄像机与地形之间的关系如图4所示。中心视线AP上第1个与DEM地形表面相交的点即为视域中心点S,可利用Janus算法求解,具体步骤如下:
①点P坐标求解。在ΔAA′P和平面XOY中,有三角函数关系:
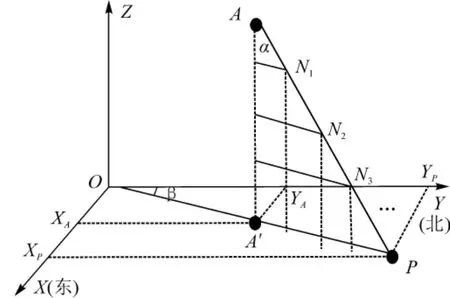
图4 摄像机与地形之间的关系Figure 4 Relationship between camera and terrain

由空间2点间距离公式得线段AP的距离为:

联合式(2)(3)(4)即可解出点 P 的坐标。
②平分点坐标求解。由点A′,P的坐标可得射线A′P的直线方程:

根据数字高程模型分辨率,将视线AP进行n等分;根据式(5)和相似三角形和等比分点公式,得第k个等分点Nk的坐标为:

③确定视域中心点S的坐标。利用距离加权平均法[13]插值得到等分点的地形高程:

式(7)中:n=4,zi为格网结点的高程,di为格网结点到内插点的距离。
沿视线AP方向对等分点进行扫描,如果数字高程模型上点的高程小于对应等分点的高程,则进行下一点判断,直到数字高程模型上第1个点的高程大于对应等分点的高程,返回该点即点S。
2.2.3 圆的正多边形逼近算法 计算机中,常用多边形扫描算法模拟圆[14]。圆的内接多边形边数可以控制,则垂直于中心视线的平面形状的模拟可以控制。本研究用正十二边形模拟光圈圆S,步骤如下:
①求圆S的半径R。在三角形△ASE′中,由空间2点的距离公式和三角函数关系有:

②正十二边形各点的坐标求解。如图5,圆上一点E0′和视域中心点S在高程为0的平面上的投影点分别为 E0″、 S ″,设向量 E0″S′平行于 X 轴,以 E0′(XE0′,YE0′,ZE0′)为初始点,将圆 S 等分为 12 段。根据2点间距离公式和空间向量解析几何,可得到如下方程组:


图5 圆的正十二边形逼近示意图Figure 5 Sketch of regular dodecagon generating a circle
从而可以得到点E0′的坐标。同理,其余11点由以下方程组解得:

式(11)中:i取1到11的自然数。依次连接各相邻点完成圆S的模拟。
2.2.4 视域边界的确定 前面说过,视点与视域内各点所在直线必过圆平面。连接视点与正十二边形各点,再次利用Janus算法分别计算出各外围视线与数字高程模型的交点,即可得到视域的边界。分析视点到视域内所有目标点的通视情况,并在数字高程模型上显示。
2.2.5 同步跟踪算法的实现 确定边界视线在数字高程模型上的边界点是同步跟踪算法的关键。因此,基于数字高程模型的同步跟踪算法的步骤如下:①初始化地形,确定摄像机的空间位置,获得某时刻摄像机的俯仰角、方位角,根据数字高程模型的分辨率,利用Janus算法计算视域中心点;②确定摄像机的视场角,计算过视域中心点且垂直于中心视线的平面圆的半径,利用正十二边形逼近算法模拟平面圆,得到多边形各点坐标;③再次利用Janus算法分别计算各边界视线在数字高程模型上的交点坐标,得到视域边界,分析视点到视域内所有目标点的通视情况,并在数字高程模型上显示;④数字云台控制摄像机旋转,删除前一角度的通视线路,添加新的通视线路,重复前3步骤完成同步跟踪算法。根据以上步骤,在Visual Studio 2008开发平台上采用C#.NET编程语言,利用Arc Engine 9.3开发包编程实现同步跟踪算法。
3 实验结果分析
已知摄像机的空间坐标为(473 600.03,3 348 919.39,62.75)。进行实验:a时刻,俯仰角为55°,方位角为310°,焦距为50 mm;b时刻,俯仰角为65°,方位角为310°,焦距为50 mm;c时刻,俯仰角为65°,方位角为190°,焦距为50 mm,分别利用本研究的算法得到的摄像机的视域范围如图6白色圆形区域所示。
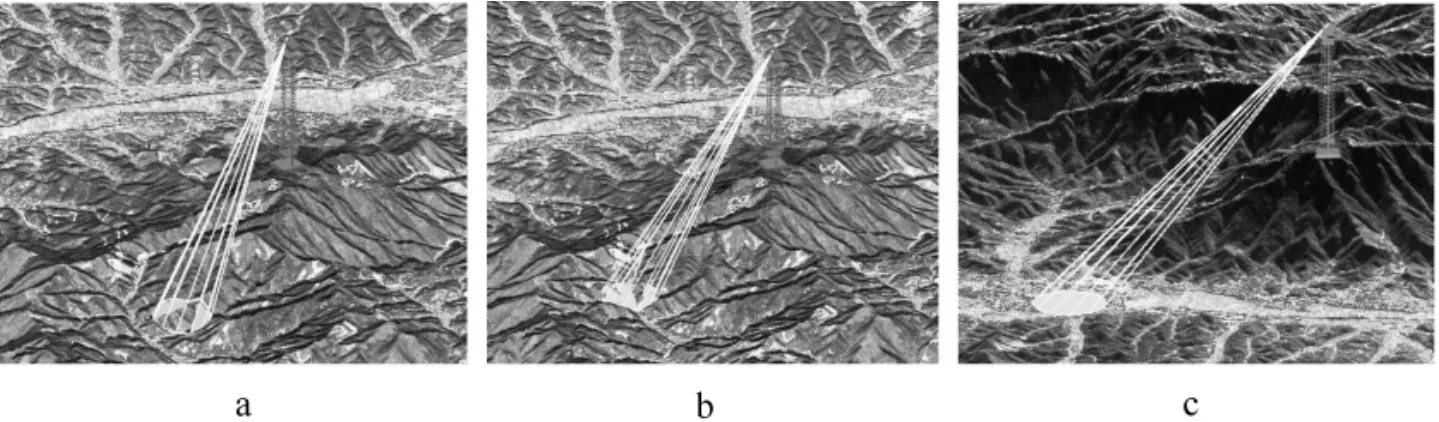
图6 不同时刻视域范围显示对比Figure 6 Contrast of visualization domain display at different time
从图6中可以看出:改变摄像机的俯仰角(a,b时刻)或者方位角(b,c时刻),该算法都可以得到摄像机在数字高程模型上的视域范围,从而实现同步跟踪。
4 结论
摄像机视域与地图数据的同步跟踪算法是视频监控技术与地理信息系统技术联动的关键。本研究以数字高程模型数据为基础,依据手电筒光圈形成过程建立摄像机视域的数学模型,通过圆的正多边形逼近算法和Janus算法得到了摄像机视域范围。实验证明:该算法可以实现摄像机视域在数字高程模型上的同步跟踪显示,而且此算法可控制过中心点且垂直于中心视线的平面的形状,为视频监控与地理信息系统的结合提出了一般性方法,也为准确确定火点的位置以及进行森林防火资源配置奠定了基础。
[1] FANG Lumig,XU Aijun,TANG Lihua.Study of the key technology of forest fire prevention based on a cooperation of video monitor and GIS [J].Nat Comput,2008,5:391-396.
[2] STULA M,KRSTINIC D,SERIC L.Intelligent forest fire monitoring system [J/OL].(2011-03-29)[2012-02-10].http://www.springerlink.com/content/l35355107k365723.
[3]李龙国,沈明霞,丛静华.基于Arc Engine的与林火监测摄像机联动的GIS设计与实现[J].浙江农业学报,2011,23(1):159-163.LI Longguo,SHEN Mingxia,CONG Jinghua.Design and realization of GIS for forest fire monitoring system based on ArcEngine [J].Acta Agric Zhejiang,2011,23(1):159-163.
[4]戴寿连,徐爱俊.森林火险评价与防火资源配置系统设计与实现[J].林业资源管理,2011(3):105-110.DAI Shoulian,XU Aijun.Design and development of forest fire risk assessment and forest fire protection resource allocation system [J].For Resour Manage,2011(3):105-110.
[5]黄小银,徐爱俊,张晨辉.森林防火监测型资源配置评价及优化方法[J].浙江农林大学学报,2011,28(4):583-589.HUANG Xiaoyin,XU Aijun,ZHANG Chenhui.Evaluation and optimization methods of forest fire monitoring resources allocation [J].J Zhejiang A&F Univ,2011,28(4):583-589.
[7]徐爱俊,方陆明,楼雄伟.基于可见光视频的森林火灾识别[J].北京林业大学学报,2010,32(2):14-20.XU Aijun,FANG Luming,LOU Xiongwei.Forest fire identification algorithm based on a visible light video [J].J Beijing For Univ,2010,32(2):14-20.
[8]柴红玲,方陆明,王苏燕.视频和GIS技术在森林防火中的应用[J].农机化研究,2009,31(1):196-199.CHAI Hongling,FANG Luming,WANG Suyan.The application of video and GIS technique in forest fires prevention[J].J Agric Mech Res,2009,31(1):196-199.
[9]方陆明,柴红玲,唐丽华,等.基于DEM的视频可视域提取算法[J].北京林业大学学报,2010,32(3):27-32.FANG Luming,CHAI Hongling,TANG Lihua,et al.An extraction of a DEM based video visualization domain [J].J Beijing For Univ,2010,32(3):27-32.
[10]王元园.基于GIS的森林火灾视频监控定位方法研究[J].林业机械与木工设备,2008(5):24-26.WANG Yuanyuan.GIS-based positioning methods in video monitoring of forest fires [J].For Mach&Woodworking Equip,2008(5):24-26.
[11]李胤,杨武年,杨容浩,等.基于移动曲面拟合算法和加权平均算法的DEM内插算法改进 [J].测绘,2010,33(4):168-171.LI Yin,YANG Wunian,YANG Ronghao,et al.Improvement of DEM interpolation algorithms based on moving surface fitting and distance-weighted [J].Surv&Map,2010,33(4):168-171.
[12] HENDERSON D L.Mod Terrain:A Proposed Standard for Terrain Representation in Entity Level Simulation [D].Monterey:Naval Post Graduate School,1999.
[13] CALDWELL D R,MINETER M J,DOWERS S,et al.Analysis and visualization of visibility surfaces [J/OL].(2003-09-08)[2011-12-20].http://www.geocomputation.org/2003/.
[14]张博.生成正多边形和圆的新算法[J].工程图学学报,2011(2):1-4.ZHANG Bo.New algorithm of generating regular polygon and circle [J].J Eng Gr,2011(2):1-4.
猜你喜欢
社会科学战线(2022年8期)2022-10-25
特区文学·诗(2021年6期)2021-12-22
青年文学家(2020年22期)2020-08-31
冰雪运动(2020年1期)2020-08-24
计算机技术与发展(2020年8期)2020-08-12
电脑报(2020年12期)2020-06-30
武术研究(2020年2期)2020-04-21
电脑报(2019年4期)2019-09-10
大众摄影(2015年9期)2015-09-06
当代贵州(2015年19期)2015-06-13