
基于ARM的SVPWM蓄电池电机车变频调速控制系统设计
2012-08-28 06:50李瑞金魏敬喜
电机与控制应用 2012年10期
李瑞金, 金 林, 燕 翔, 魏敬喜
(1.安徽理工大学 电信学院,安徽淮南 232001;2.安徽师范大学,安徽芜湖 241000;3.安徽淮南矿业集团张集矿,安徽淮南 232001)
0 引言
电机车是煤矿生产中主要的运输装置。目前矿用电机车主要有直流架线式和蓄电池式两种。其中架线式电机车由于主要用于非瓦斯矿井以及一、二级瓦斯矿有新鲜风流的大巷中,而且架线易损坏,所以使用较少。目前在含有瓦斯、煤尘,有良好通风条件,瓦斯、煤尘不能聚集的煤矿上普遍采用蓄电池式电机车。以往电机车采用直流串激电动机作为牵引电动机的蓄电池式电机车,其控制办法通常采用凸轮控制器切换串接于电机电枢回路的电阻,进行电机车的起动和调速控制。这种控制方式在电动机起动和调速期间,其大部分能量都消耗在电阻上了,效率不高。因此,将原有的直流串激电机用交流异步电动机代替,用交流变频调速方法对异步电动机进行调速已成为趋势,为了进一步提高电机车的调速性能,根据电机车的工作环境和实际工况中对电机车调速系统的要求,设计了基于SVPWM无速度传感器的矢量控制系统,试验证明该系统具有动态跟随性好,起动转矩大等特点,解决了直流电机在实际使用中的弊端,提高了工作效率。
1 SVPWM在矿用电机车变频调速系统中的应用
1.1 SVPWM基本原理
SVPWM的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM波形。
设直流母线侧电压为Udc,逆变器输出的三相相电压为UA、UB、UC,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律变化,时间相位互差120°。假设Um为相电压有效值,f为电源频率,则有影就是对称的三相正弦量。由于三相正弦波电压在电压空间向量中合成一个等效的旋转电压,其旋转速度是输入电源角频率,等效旋转电压的轨迹,如图1所示的圆形。利用电压向量合成技术,得到的设定电压向量就等效于一个在电压空间向量平面上平滑旋转的电压空间向量,从而达到电压空间向量脉宽调制的目的。

图1 电压空间矢量图
其中,θ=2πft,则三相电压空间矢量相加的合成空间矢量U(t)就可以表示为

可见U(t)是一个旋转的空间矢量,其幅值为相电压峰值的1.5倍,Um为相电压峰值,且以角频率ω=2πf按逆时针方向匀速旋转的空间矢量,空间矢量U(t)在三相坐标轴(a,b,c)上的投
1.2 SVPWM控制算法的ARM实现
由SVPWM的法则推导分析可知,要实现SVPWM信号的实时调制,首先需要知道参考电压矢量Uref所在的区间位置,然后利用所在扇区的相邻两电压矢量和适当的零矢量来合成参考电压矢量。电压矢量调制的控制指令是矢量控制系统给出的矢量信号Uref,它以某一角频率ω在空间做逆时针旋转,当旋转到矢量图的某个60°扇区中时,系统计算该区间所需的基本电压空间矢量,并以此矢量所对应的状态去驱动功率开关元件动作。当控制矢量在空间旋转360°后,逆变器就能输出一个周期的正弦波电压。对于每一个SVPWM的零矢量分割方法不同,以及对非零矢量Ux的选择不同,会产生多种多样的SVPWM波,所以用控制器实现SVPWM的编程方法,就要有选择的原则:(1)尽可能使开关功率管的开关次数最少;(2)任意一次电压空间矢量的变化只能有一个桥臂的开关管动作;(3)编程容易。
2 蓄电池电机车变频调速系统总体方案
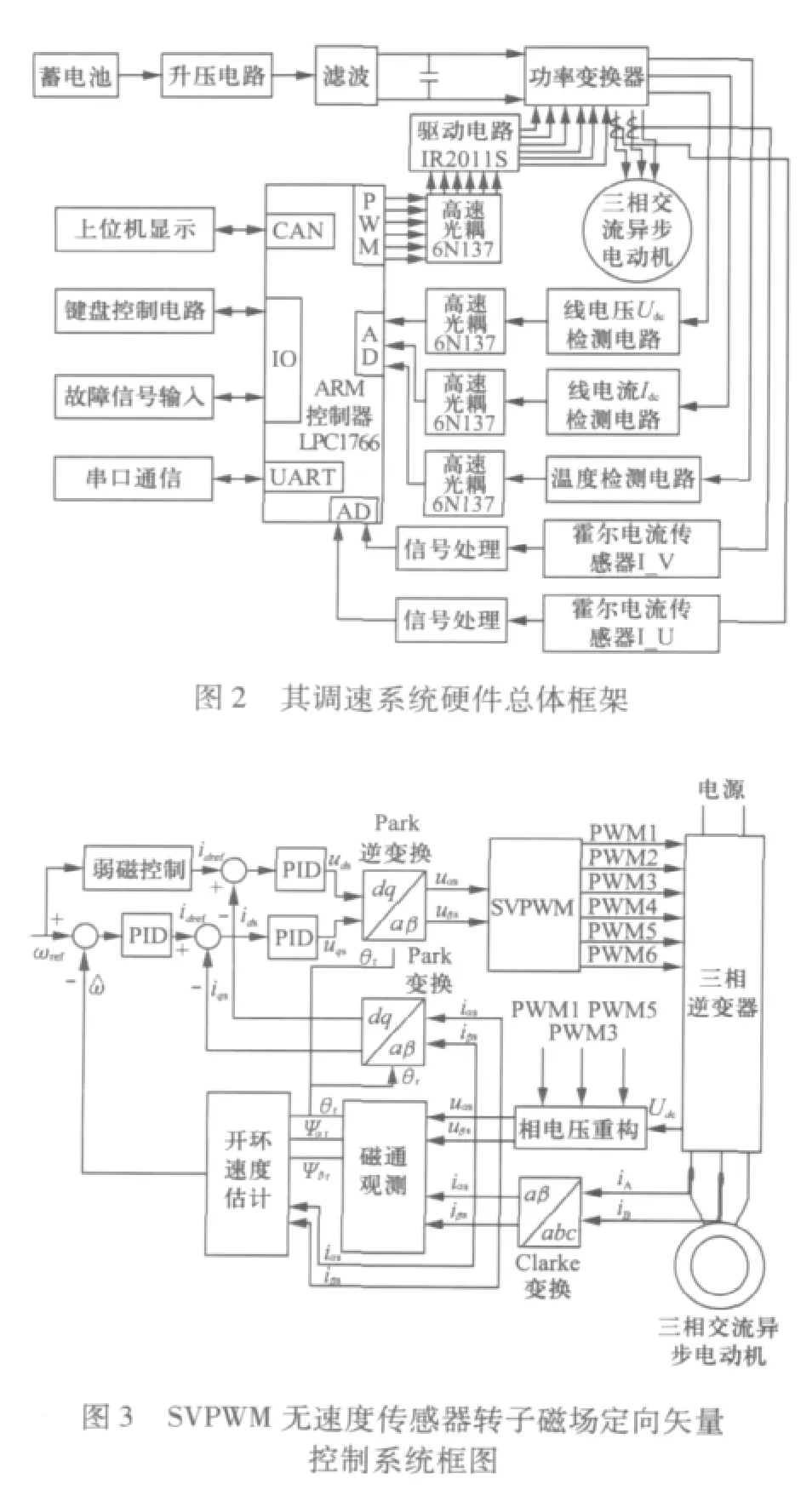
矿用电机车调速系统由于处于频繁起动、制动、加减速等状态,还要适应上下坡和颠簸路况等情况,因此要求电机起动转矩大、过载能力强[7]。根据上述要求,本调速系统设计主要包括蓄电池、升压电路、逆变部分、驱动部分、控制系统部分、上位机控制界面、检测电路,故障与保护处理电路等。其调速系统硬件总体框架如图2所示。其中SVPWM无速度传感器转子磁场定向矢量控制系统框图如图3所示。的控制信号不足以驱动开关管的导通和关断,在控制器和IGBT之间要加驱动电路,驱动电路主要选择专用驱动芯片IR2110S,IR2110S是美国IR公司生产的驱动芯片,集成度高,具有独立的低端和高端输入通道,有自举电路,可以保证上下两路信号独立有效输出,可以直接驱动两个功率半导体器件MOSFET或GBT(IGBT),兼有电气隔离和电磁隔离的优点。一相IGBT的驱动电路如图4所示。ARM输入6路PWM波控制信号分别给3片IR2110S,每片IR2110S驱动一对上下桥臂,为了使控制板不受高压干扰,故设计中采用了高速光耦隔离高压与低压侧PWM驱动信号。同时,PWM上下桥臂还设有直通硬件保护和过流硬件保护。此控制信号控制功率开关管输出三项正弦波电压给电机供电。通过编程控制改变电源的频率来改变加在电机定子上的电压,从而达到对转速的控制。

图4 单项开关电路驱动电路
3 蓄电池电机车调速系统控制电路硬件设计部分
3.1 功率变换器主回路电路及IGBT驱动电路
功率变换电路的种类比较多,对于选择哪种类型的逆变器主要取决于设计电路的性能要求及应用场合。在这里选择IGBT作为主开关器件的逆变电路和直流储能电容组成。由于ARM输出
3.2 电流检测电路部分
用CS010GT霍尔传感器检测输出电流波形,低压侧和高压侧完全隔离,工作电压+5 V,量程选择:原边电流-10~+10 A对应输出电压0.5~4.5 V,在经过限幅及低通滤波和两级运放后,通过高线性模拟光耦隔离传给LPC1766的A/D模块,从而实现对电机电流的检测,用于矢量控制。检测电路如图5所示。
IGBT功率器件温度检测电路主要采用热电偶来检测。将检测到的电流信号通过取样电阻转换成电压信号,经两级电压跟随后送给LPC1766,通过软件与设定的标准值进行比较,如果超上限
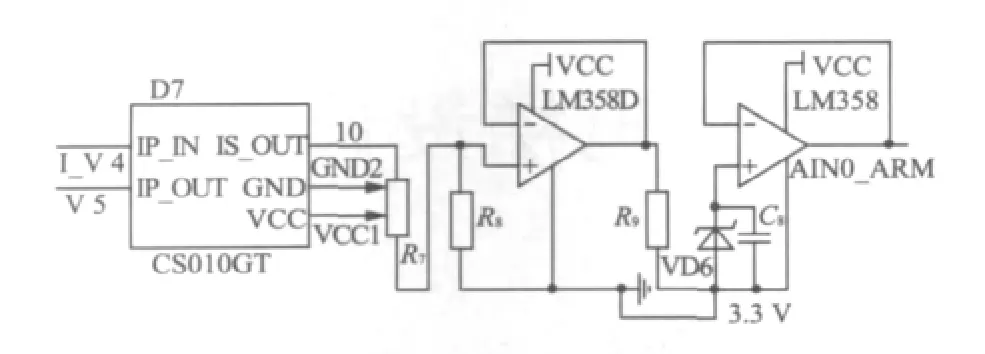
图5 电流检测电路
则发出故障信号,一方面LPC1766关断IGBT封锁PWM信号,断开主电路;另一方面将读取故障寄存器判断故障类型,将信号通过CAN通信传给上位机显示,并记录发生故障的时间及故障处理情况。可见通过检测电路有效增强了系统可靠性,保证了系统运行的稳定性。
4 蓄电池电机车调速系统软件实现部分
控制系统软件部分主要由主程序、硬件初始化、软件初始化、运行状态检测模块、故障处理、中断服务程序和上位机软件等组成。主程序主要对硬件和变量初始化,对各个控制寄存器赋值,对运算过程中出现的各种变量分配地址和赋值。中断服务程序以及其他子程序是系统的核心部分,主要执行SVPWM,PID调节、UART、CAN通信和故障处理中断。其中系统主程序和矢量控制中断服务程序流程图如图6所示。一个管理者来协调和管理每个功能模块,基于ARM具有操作系统移植的思想,本文通过移植源码开放(C代码)的嵌入式系统μC/OS的uCLinux来管理整个变频调速系统的运行。μC/OS简单易学,提供了嵌入式系统的基本功能,其核心代码短小精悍,针对硬件进行优化,还可以获得更高的执行效率。要想使用μC/OS操作系统来管理各个模块,首先必须要创建多任务管理机制,采用多任务管理机制对整个控制系统的各个功能进行任务分割,并且对各个任务分配优先级,各个任务的使用通过抢占模式来运行。多任务管理模式如图7所示。
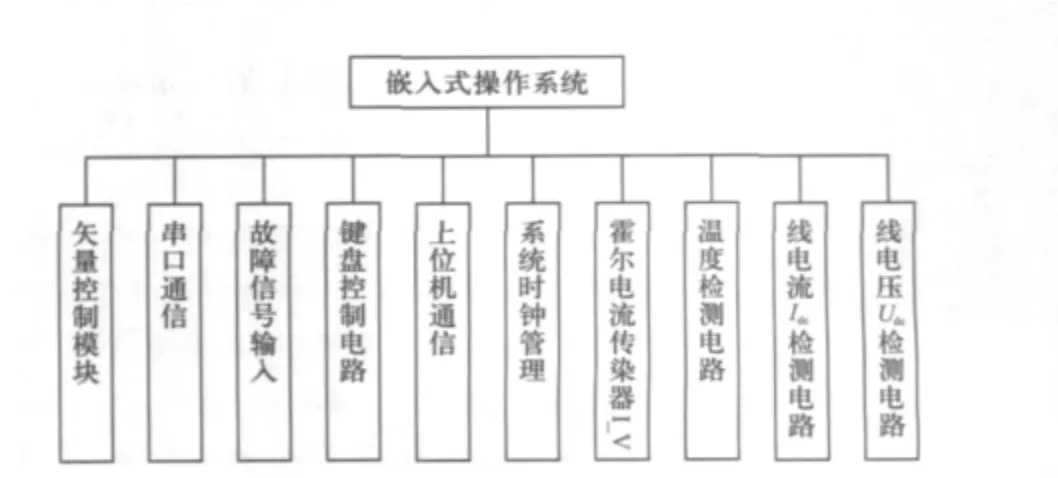
图7 多任务管理机制架构

图6 主程序、中断流程图
要想使控制系统可靠稳定的运行,必须要有
上位机软件主要采用VB开发的管理界面,通过VB上的MSComm控件可与控制板之间进行MAX232通信,来传输数据和接收数据,串口设置为波特率9 600 bps,无校验位,数据位8,停止位1。上位机主要通过串口通信发送控制指令,包括起动、停止、急停、加速、减速等,以及接收数据信息包括工作状态、频率、电流、电压、温度等,将接收到的数据在上位机上实时显示。同时,上位机还具有故障记录功能,下位机可通过键盘控制电路设置起动频率及工作模式选择。
5 结语
通过ARM对矿用电机车进行控制,实现变频调速的SVPWM控制策略和对其他功能电路的控制。弥补了单DSP在控制方面的不足,同时还引进了ARM移植操作系统的功能,有效提高了变频调速系统的整体性能和电机的高效运行,同时有了上位机的直观显示和下位机控制系统的可靠运行,有力保证了矿用电机车在煤矿井下的安全运行。
[1]杨旭强,吴红星,金钊,等.基于ARM电动机控制技术[M].北京:中国电力出版社,2008.
[2]王晓明.电动机的DSP控制[M].北京:北京航空航天大学出版社,2009.
[3]邵贝贝.嵌入式实时操作系统μCOS-Ⅱ[M].北京:北京航空航天大学出版社,2003.
[4]栗忠魁,阮毅,宗剑,等.直流架线式矿用电机车变频调速控制系统的设计[J].电机与控制应用,2011,38(5):27-30.
[5]鲍远慧,段琼,杨艳丽.基于ARM的开关磁阻电机的控制系统[J].电机与控制应用,2011,38(4):29-33.
[6]NXP Semiconductors. LPC17xxPreliminaryuser manual[G].2009.
[7]张运乾.变频调速技术在蓄电池电机车上的应用和研究[D].淮南:安徽理工大学,2007.
猜你喜欢
矿山机械(2022年9期)2022-09-20
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电子制作(2017年7期)2017-06-05
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
新疆钢铁(2015年1期)2015-02-10
自动化博览(2014年6期)2014-02-28
