盾构及掘进流程虚拟现实系统开发
2012-08-28 08:38韩伟锋李凤远陈启伟
隧道建设(中英文) 2012年4期
韩伟锋,李凤远,陈启伟
(1.盾构及掘进技术国家重点实验室,郑州 450001;2.中铁隧道集团有限公司,河南洛阳 471009)
0 引言
虚拟现实(VR,Virtual Reality)也称虚拟实境或灵境,是一种可以创建和体验虚拟世界的计算机系统。它利用计算机技术生成一个逼真的,具有视觉、听觉、触觉等多感知的三维虚拟环境,用户通过使用各种交互设备同虚拟环境进行互动,身临其境地与之进行交互仿真和信息交流[1-2]。国外对于虚拟样机技术的研究已经比较普遍,如美国波音公司对波音777和787的开发、Chrycler公司与IBM合作对新型车的研制、芬兰VTT电子公司对手机的开发等,都用到了虚拟样机技术,并为企业带来了巨大的社会效益和经济效益。
目前主流的CAD软件虽有装配的结果,但难以进行人机交互的装配过程的展示;主流的CAE分析软件虽有分析的结果,但难以进行分析数据的沉浸可视化展示,特别是人机交互设计能力明显不足[3-4];虚拟现实技术具有非常好的展示能力,但没有运动学,动力学及标、矢量场的分析能力,使加工过程和虚拟样机中很多部件的运动状态难以确定。因此,实现设计、分析与展示各系统的集成是十分重要的,将三者有机结合,可以研发出人性化的集成仿真平台,弥补传统设计手段的不足,帮助工程师及时发现设计、装配、制造过程中存在的问题,从而指导设计阶段的工作,缩短产品的开发周期,降低产品的成本,提高产品的设计质量,增强产品的创新性。
国外对于虚拟样机的研究具有起点高、目标大的特点;对虚拟现实技术设备依赖性较强;虚拟样机系统一般都建立在大、中型机或高性能图形工作站上,使用PC的还比较少;被实力雄厚的国家研究机构和大型制造业所应用;对虚拟样机应用的市场需求逐渐走强。目前我国仍处于虚拟样机技术研发的成形期,并且虚拟现实的应用范围大多限于房地产仿真、古迹仿真等一些建筑规划方面,而应用工业生产的还比较少,特别是与大型机械装备相关的工业生产与制造[5-10]。盾构掘进虚拟现实系统不仅关系到建筑仿真,更多的是机械产品的仿真,它不仅能更进一步地拓展我国虚拟现实系统在工业施工领域的应用,而且也将使虚拟现实技术在机械装备领域的应用更加成熟。
结合我国目前计算机虚拟现实技术的发展水平和盾构施工行业的特殊性,采用虚拟现实技术在实验室内培训盾构主司机以及各种盾构保养、维护人员可以起到事半功倍的效果。在施工现场由于各种设备都在正常使用状态,加之新进人员对盾构的了解比较少,如果让新进人员在现场进行学习,不仅会影响工程施工,而且也会给学习人员带来危险;因此,采用虚拟现实技术可使新进人员不用到施工现场就可以亲身体验到施工现场的各种状况,同时也可以通过虚拟现实系统控制设备,练习盾构的操作,熟悉盾构的主要零部件等。
1 盾构及掘进场景虚拟现实系统功能特点
1.1 漫游观看
通过第一人称相机、第三人称相机和飞行相机等各种模式下漫游观看盾构、盾构施工隧道内部及外部场景、盾构掘进作业整套流程的循环。流程为:盾构主机掘进—刀盘旋转掉土加泡沫—经螺旋机把土输送到渣土传送设备—渣土经传送设备进入转运小车,螺旋机输出渣土进入小车—小车把渣土运送到隧道出土洞口—由门吊把渣土吊运地面处理,管片从管片厂运送到管片门吊旁边—管片由门吊送入隧道竖井—管片小车把管片送入隧道内—通过盾构的管片吊机把管片运送到管片安装机位置—安装管片。
1.2 虚拟交互
通过鼠标和键盘可对盾构掘进过程中各个主要动作进行单独操作,如管片机安装管片、刀盘旋转等。采用数据手套和位置跟踪器完成换装滚刀的过程(带物理碰撞和逻辑关系),利用盾构自动化控制平台可实现对盾构的控制,该功能可实现盾构主司机的培训,减少现场培训成本和培训风险。图1为剖切状态下盾构内部结构工作图,图2为采用数据手套对滚刀进行拆装模拟演示。
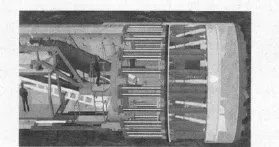
图1 盾构内部结构Fig.1 Internal structure of shield machine
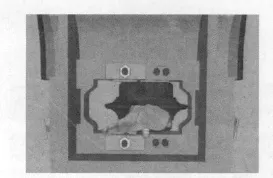
图2 滚刀拆装模拟演示Fig.2 Simulation of disc cutter disassembly
2 盾构及掘进虚拟现实系统演示环境硬件组成
根据虚拟现实技术的内涵和本质特征可以看出,它的研究与开发是一项技术要求比较高的工作,它需要有相应的软硬件系统环境予以配套进行。除了完善的虚拟现实软件开发平台和三维图像处理系统之外,根据虚拟现实的技术特征,系统还要求具有高度逼真的三维沉浸感,这种沉浸感主要通过立体听觉、三维触觉或力感以及具有高度沉浸感的视觉环境来实现。其中,立体听觉一般通过三维环绕立体声响系统来实现,三维触觉和力感可以通过高精度的计算机触觉或力反馈设备来实现,而高度沉浸的视觉环境通常会通过大屏幕立体投影显示系统来实现,如多通道柱面投影显示系统、球面仿真投影显示系统或CAVE沉浸式仿真环境。此外,根据虚拟现实的技术特征要求,实时交互性是虚拟现实技术的灵魂,它是区别于其他传统媒体技术的本质所在。在虚拟现实系统中,这种交互往往通过多自由度的虚拟现实交互设备来实现,如数据手套、位置跟踪器等,最终形成一个完整的虚拟现实实验室系统。
根据虚拟现实技术的内涵与实验室总体建设目标的要求,一个完整的虚拟现实与数字媒体实验室系统的结构组成、功能构成和技术构成应包括视景仿真应用软件开发平台和运行平台、高性能图像生成和处理系统IG(Image Generator)、6自由度仿真交互系统、集成管理控制系统和立体音效输出功能。
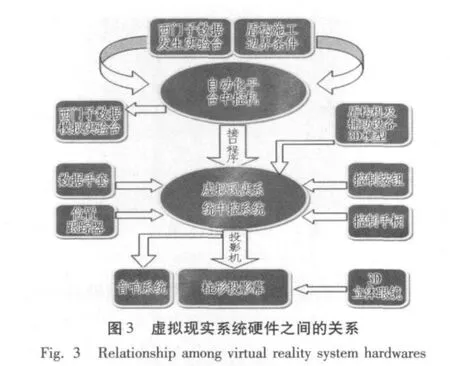
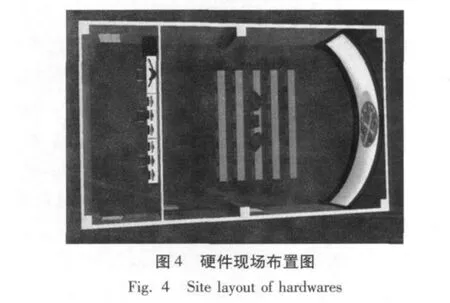
综上所述,一个完整的虚拟现实系统的建立必须满足上述的系统组成和功能技术要求。因此,为了建立一套完整的、切实可行的虚拟现实实验室系统,我们也必须根据上述的功能、组成和技术要求,对虚拟现实实验室系统的建设进行总体规划和系统设计,最终构建一套完整的虚拟现实实验室系统环境。图3为虚拟现实系统硬件之间的关系,图4为硬件的现场布置图。
3 盾构及掘进虚拟现实系统软件开发
3.1 零部件命名规则
盾构及掘进场景的各种零部件规模较大而且数量较多。为此,首先必须对各个零部件制定出一套完善的命名规则,方便以后对各个零部件进行更新、替换、修改和程序驱动等。本系统采用3级命名法,即产品级、一级总成和一级总成以下的零部件。产品级由类别码和2位序号码组成,其代号释义如图5(a)所示。一级总成代码由所属产品码、3位序号码和2位数量码组成,代号释义如图5(b)所示。一级总成以下的代码由所属总成类别码、3位序号码和2位数量码组成,代号释义如图5(c)所示。
DG-01表示第1台盾构及施工场景虚拟现实系统;DG01-001-01表示属于第1台盾构及施工场景的盾构刀盘总成,刀盘总成的数量为1,001为流水号码,这里暂定义为盾构刀盘,根据设计者定义而成,没有特定的意义,01表示刀盘总成的数量;001-002-36表示刀盘总成下的正滚刀数量为36把,001表示滚刀归属的总成为盾构刀盘总成,002为流水号码,这里暂定义为正滚刀总成。所有的流水号码为设计者在设计中自行定义,并且制成数据表格,加注合适的汉语注释,供在后续的研究工作中查询。
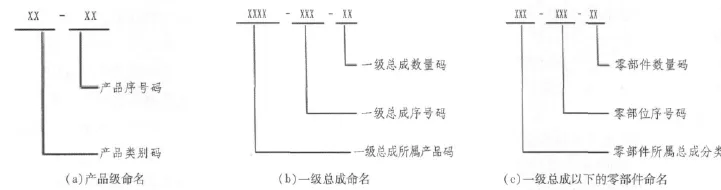
图5 零部件命名规则示意图Fig.5 Naming principle of parts of shield machine
3.2 模块化设计
所谓模块化设计,简单地说就是将系统的某些要素组合在一起,构成一个具有特定功能的子系统(相应模块),将这个子系统做为通用性的模块与其他子系统进行多种组合,构成新的功能系统,产生多种不同功能或相同功能、不同性能的系列功能系统。在该系统中,相应的子系统(相应模块)不进行相互制约与影响,这体现在当一个子系统崩溃或更换时不至于影响到其他模块的正常运行。由于子系统的无关性,每个团队小组或者团队成员负责自己的子系统开发,而无须关心其他子系统,达到高效分工、协同开发的目的。
模块化设计的原则是力求以少数模块组成尽可能多的功能系统,并在满足要求的基础上使模块功能准确,性能稳定,结构简单、规范,模块间的联系尽可能简单。综合考虑盾构施工各零部件的空间位置组合和使用功能,盾构及掘进场景虚拟现实系统分为刀盘总成、主驱动、前体总成、中体总成、盾尾总成、推进油缸、管片安装机、管片吊机、管片转运系统、螺旋输送机、设备桥、1号拖车、2号拖车、3号拖车、4号拖车、列车编组、隧道管片、隧道内辅助设施、盾构始发土木结构等37个一级子系统,并且各个一级子系统又根据需求包含各种二级和三级子系统,这里不再一一赘述,其具体分类内容由设计者根据需要来分。
3.3 3D 场景设计
根据各种图形资料数据,按照1∶1比例采用CATIA V5对盾构及施工配套设备、土木结构等部分进行三维建模。由于CATIA V5的数据模型包含各种数字设计信息,并且数据量特别大,为保证虚拟现实系统在计算机系统内运行流畅,必须对模型进行数据轻量化处理。在对模型进行轻量化处理过程中由于模型较多,直接采用3DMAX进行减面处理工作量将会非常大;因此,必须先用3DVIA对完成后的CATIA模型进行自动处理,然后再用3DMAX进行减面。
3DMAX主要是对一些圆形零件进行减面处理[11]。在计算机平面图形中,各个圆实际上是由多条线段组成的多边形,只是由于边数较多,在通过计算机浏览时肉眼的感觉为圆。同理,3D图形是由多个面组成一个柱体,图6为3个滚刀刀圈分别由12边形 (a)、20边形 (b)和100边形 (c)组成。(a)有明显的边棱,而 (c)占用太多资源,为保证计算机运行流畅,面数必须控制在一定范围,在不影响人视觉的前提下应尽量减少面数,根据实际效果可以采用方式 (b)。

在建模过程中有很多零部件,如电瓶车、砂浆车、空调、电控柜、变压器等不需要仿真其内部的零部件可采用贴图完成其效果渲染,这样既能降低资源占用率,又能使效果更加逼真。图7为采用贴图处理后的电瓶车,图8为完成盾构主机及后配套模型示意图。
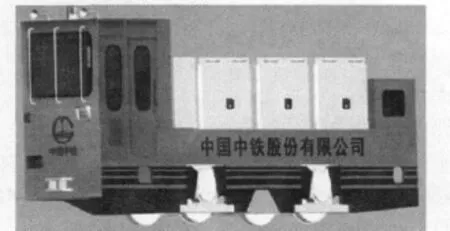
图7 贴图处理后的电瓶车Fig.7 Model of shield machine and its back-up system
3.4 虚拟交互开发
人机交互的主要特点在于操作人员可以通过操控设备,控制虚拟场景中的盾构掘进及配套的各种工作流程。盾构工作的各种动作开发分为2种方式,1)采用VC编写驱动程序,2)采用3DMAX录制动画,然后采用VC按照一定序列组合驱动。在实际操作过程中,由于编写程序比较复杂,有固定工作方式的可采用录制动画,然后用程序控制驱动的方式,如螺旋输送机从刀盘舱内向外排渣,矿车运送渣土等工作流程;没有固定工作方式的必须采用程序来驱动各个零部件的动作,如管片安装机需要旋转不同角度和移动不同位置来安装不同管片,因此,必须采用程序控制方式来完成工作流程的仿真。盾构及掘进场景虚拟现实系统软件开发流程如图9所示。

图8 盾构主机及后配套模型Fig.8 Procedure of developing of virtual reality software of shield machine and boring
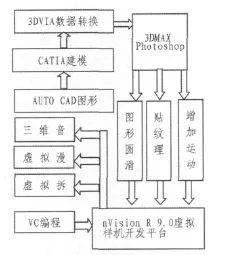
图9 盾构及掘进场景虚拟现实系统软件开发流程图Fig.9 Parts of virtual reality system of shield machine and boring
4 盾构及掘进虚拟现实系统应用
4.1 培训学习
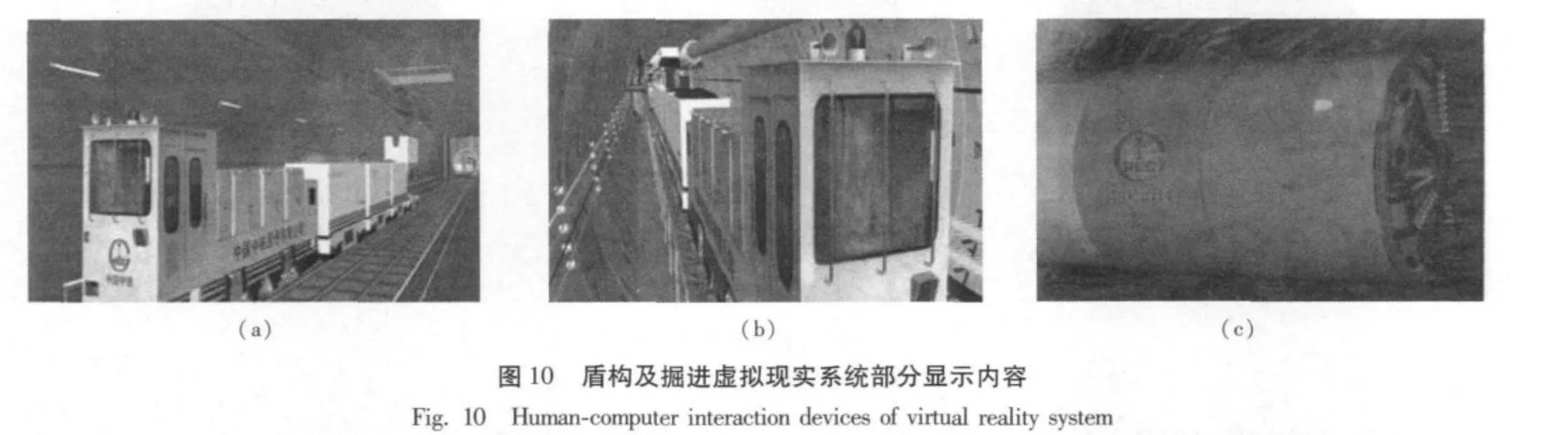
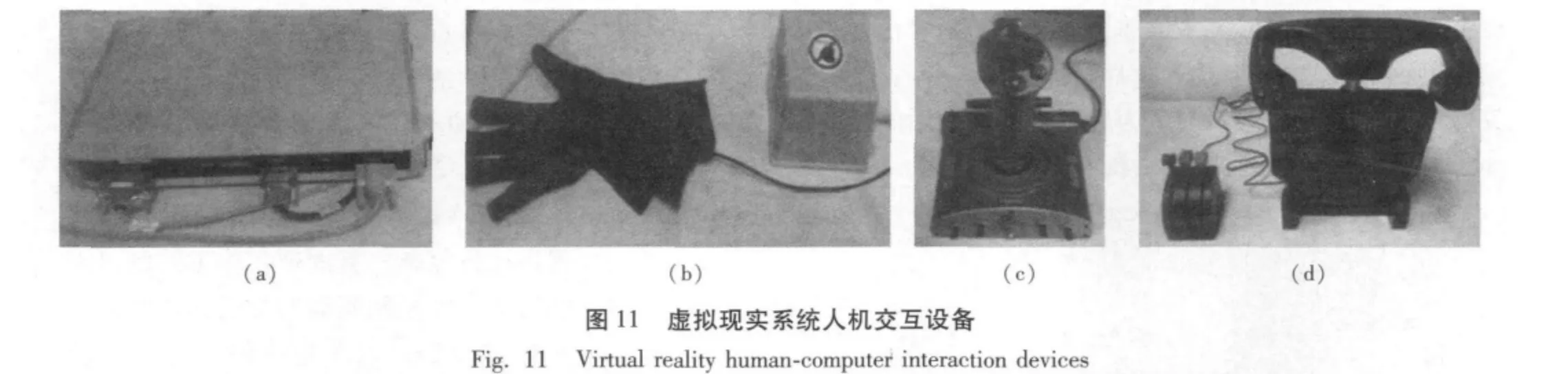
新进盾构施工人员由于缺乏足够的现场知识,只靠一些图片、视频和文字资料等进行培训,这往往使学员难以很快地掌握并熟练;由于施工现场环境复杂,对那些没有足够经验的人员进入现场,如果没有做好保护工作,容易出事故;另外,在施工过程中基本不会让学员去操作某个设备。采用虚拟现实系统可以完全避免上述问题,学员通过该系统可以真实地感受到现场的环境,并且认识施工现场和盾构的各个部位,如图10所示,采用虚拟交互设备,学员可以对现场的各种施工设备进行模拟操作,如图11所示。
4.2 科学研究
研究人员在对盾构及掘进技术进行研究过程中,可以采用虚拟现实技术结合各种实验数据进行分析,如盾构施工现场布置合理性模拟、盾构及辅助设备在隧道内的工作模拟、施工过程中各种潜在的施工事故模拟及事故的处理模拟等。
5 结论与讨论
本文通过对盾构及掘进场景虚拟现实系统开发的研究,突破了虚拟现实技术在大型复杂机械装备领域的应用。结合虚拟现实技术和工业CAD软件实现了盾构掘进的运动学、动力学和工作过程的人机交互,弥补了常规工业设计的不足;但是,在采用盾构控制设备与虚拟现实系统进行虚拟交互方面,由于时间和技术水平的限制,目前对盾构及掘进现场的各种设备只能有选择地部分控制,而不能实现真正意义上对盾构及各种辅助设备进行控制操作。
[1] 罗熊.基于分布式虚拟现实的高超声速飞行器仿真系统[J].北京科技大学学报,2012(1):1 -5.(LUO Xiong.Hypersonic vehicle simulation system based on distributed virtual reality[J].Journal of University of Science and Technology Beijing,2012(1):1 -5.(in Chinese))
[2] 赵沁平.虚拟现实综述[J].中国科学,2009(1):4-48.
[3] 张丹.融合数值流场的内河船舶三维航行虚拟现实系统[J].系统仿真学报,2011(11):1 -4.(ZHANG Dan.Virtual reality system for inland ship navigation by coupling numerical simulation model of flow with three-dimensional simulation platform[J].Journal of System Simulation,2011(11):1-4.(in Chinese))
[4] 周思跃.虚拟现实定义的探讨[J].计算机仿真,2006(2):224 -227.(ZHOU Siyue.Discussing the definition of virtual reality[J].Computer Simulation,2006(2):224 -227.(in Chinese))
[5] 赵文杰.基于CATIA的装载机数字化模型的建立及仿真[J].天津理工大学学报,2010(3):82 -84.(ZHAO Wenjie.Modeling and simulation of the digital model of freight elevator based on CATIA[J].Journal of Tianjin University of Technology,2010(3):82-84.(in Chinese))
[6] 张晓东.基于CATIA的应用开发研究[J].航空计算技术,1999(4):8 -11.(ZHANG Xiaodong.The application development based on CATIA[J].Aeronautical Computer Technique,1999(4):8-11.(in Chinese))
[7] 郑太雄.基于虚拟装配特征的虚拟装配研究[J].机械科学与技术,2004(7):118 -121.(ZHENG Taixiong.Study on virtual assembly based on virtual assembly features[J].Mechanical Science and Technology,2004(7):118 -121.(in Chinese))
[8] 于英华.基于Pro/ENGINEER2001的减速器虚拟装配与运动仿真[J].机械设计与制造,2006(1):104-105.
[9] 赵蔚.虚拟现实软件研究[J].虚拟现实软件研究,2012(2):235 - 239.(ZHAO Wei.Research of virtual reality software[J].Computer Technology and Development,2012(2):235-239.(in Chinese))
[10] 戴逢.虚拟现实与三维视景仿真技术在规划中的应用:2002年全国城市规划虚拟现实和三维视景仿真方案竞赛综述[J].城市规划,2003(8):38-40.
[11] 付长亮.虚拟现实技术简介[J].信息与电脑,2009(11):66 -67.(FU Changliang.The brief introduction of virtual reality[J].China Computer & Communication,2009(11):66 -67.(in Chinese))
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
铁道通信信号(2020年3期)2020-09-21
城市建设理论研究(电子版)(2019年9期)2019-09-16
铁道建筑技术(2019年5期)2019-09-14
铁道通信信号(2018年8期)2018-11-10
中国房地产业(2016年9期)2016-03-01
工程建设与设计(2016年4期)2016-02-27
工程建设与设计(2016年4期)2016-02-27
中国质量与标准导报(2014年7期)2014-02-28
铁路通信信号工程技术(2014年1期)2014-02-28