
模糊PID算法的火箭弹舵机控制方法研究
2012-09-04 10:30岳明凯李志霞
沈阳理工大学学报 2012年3期
岳明凯,李志霞,王 欣
(沈阳理工大学装备工程学院,辽宁沈阳110159)
火箭弹舵机伺服系统是典型的位置随动系统,系统根据弹上舵机控制器输出的舵面偏角信号操纵弹体舵面的偏转,依靠弹体飞行过程中舵面偏转产生的空气动力及气动力矩,稳定和控制火箭弹弹体姿态,直至命中目标[1-3],从而达到控制火箭弹飞行弹道的目的。因此,舵机控制器性能的好坏对于火箭弹控制系统起决定性作用,算法的设计直接关系到系统的控制效果。
模糊控制是智能控制的一个重要分支,与传统PID控制相比,具有无需建立被控对象的精确数学模型、对系统参数的变化具有较强的适应性等优点,适用于复杂的火箭弹舵机系统。由于模糊控制器消除系统稳态误差的性能比较差,尤其在模糊变量分级不多情况下,还可能在平衡点附近产生小幅振荡[4],所以本文将模糊控制算法与经典PID控制算法结合起来,设计模糊PID控制器来改善火箭弹舵机系统的控制效果,提高火箭弹射击精度。
1 火箭弹舵机控制技术与控制算法
本文设计的舵机控制系统采用电流环、速度环、位置环的三闭环控制方案,其示意图如图1所示。其中电流环为系统内环,采用PI控制,提高系统的快速性,及时抑制电流环内部的干扰,并限制最大电流;速度环作为中间环节,采用P调节,主要目的是减小舵机调节过程中的振荡和超调;位置环作为系统的最外环,舵机控制器对其静态精度和动态跟踪性能要求比较高,因此采用二维模糊PID参数自整定的算法。

图1 舵机伺服控制系统框图
模糊PID控制,是在传统PID控制的基础上,结合模糊控制和PID控制各自的特点,利用模糊控制自适应地实现PID控制参数的调节[5-6]。
火箭弹舵机控制系统的原理是根据地面火控系统给定的角度位置量和舵机返回的角度位置量形成的误差E和误差变化EC及其变化趋势,通过模糊推理做出相应决策,对常规PID的三个调节参数进行自整定,将整定后的kp、ki、kd送入PID调节器,形成自适应模糊PID控制器。其结构框图如图2所示。模糊PID控制算法同时兼顾被控对象响应的“静态性能”和响应的“动态性能”两个因素。

图2 模糊自适应PID控制结构框图
1.1 输入输出变量模糊化
模糊控制器的输入量为角度误差E和角度误差变化EC,输出量为PID调节器的三个控制参数的调节量kp、ki、kd。每个模糊变量,分为7个模糊状态,分别为{负大、负中、负小、零、正小、正中、正大},对应的语言变量表示为{NB,NM,NS,Z,PS,PM,PB}。E与EC的模糊论域量化为7级,论域选为连续区间[-3,3]。舵面角度的误差E的基本论域定为[-0.2,+0.2]°,误差变化 EC的基本论域定为[-2,+2]°/s,则误差 E的量化因子为15,误差变化EC的量化因子为1.5。输出变量kp、ki、kP的量化论域分别取为 [-0.3,+0.3]、[-0.06,+0.06]、[-3,+3],其基本论域与输入变量的论域相同,定为直流电机模型的经验取值区间,则输出变量kp、ki、kd的比例因子都为1。
1.2 隶属函数
经过输入输出变量等级划分,为各变量选择适合的隶属度函数,分别采用三角函数和高斯函数,利用模糊逻辑工具箱进行设计,E、EC、kp、ki、kd的隶属度函数分布如图3~图6所示。
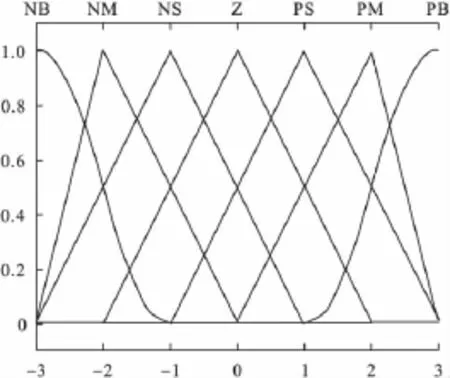
图3 E与EC隶属度函数

图4 Kp隶属度函数

图5 Ki隶属度函数
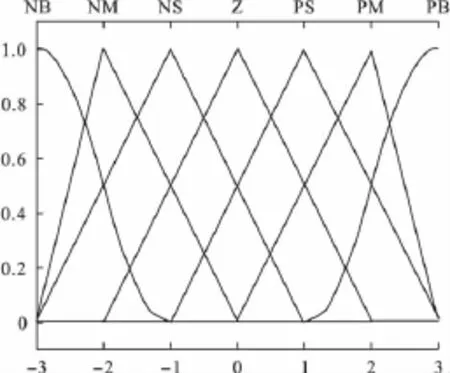
图6 Kd隶属度函数
1.3 模糊控制规则设计
模糊控制规则是由专家的经验知识和操作者的长期工作经验总结而成,本文采用“mamdani原则”的推理方法,其基本原则如下:
(1)当偏差e较大时,为加快系统的响应速度,应取较大的kp和较小的kd;但为避免系统响应出现较大的超调,导致系统不稳定,应对积分作用加以限制,通常取较小的ki或者取ki=0。
(2)当偏差e和ec处于中间值(不太大或太小)时,分为两种情况:一种是e和ec同号,即被控量朝着偏离输入给定值的方向变化,为使系统产生的超调较小,应取较小的kp,适当的ki和kd;第二种是e和ec异号,即被控量朝着接近输入给定值的方向变化,此时应逐渐减小kp和ki的值。
(3)当偏差e较小时,为使系统响应呈现良好的稳态性能,应取较大的kp和ki,而kd的取值要适当,以避免在平衡点附近出现震荡[7]。
根据上面的规律设计模糊PID控制规则表,如表1、表2、表3所示。
49条if-then模糊条件语句之间为或的关系,由第一条语句所确定的控制规则可计算出u1。同理,可由其余语句计算出控制量u2……,u49,则控制量为模糊集合u,可表示为:u=u1+u2+…u49。由此式计算出来的控制量为模糊变量,需将其转换为对应的精确量。本文选用加权平均法作为解模糊化的方法。

表1 Kp的模糊规则表
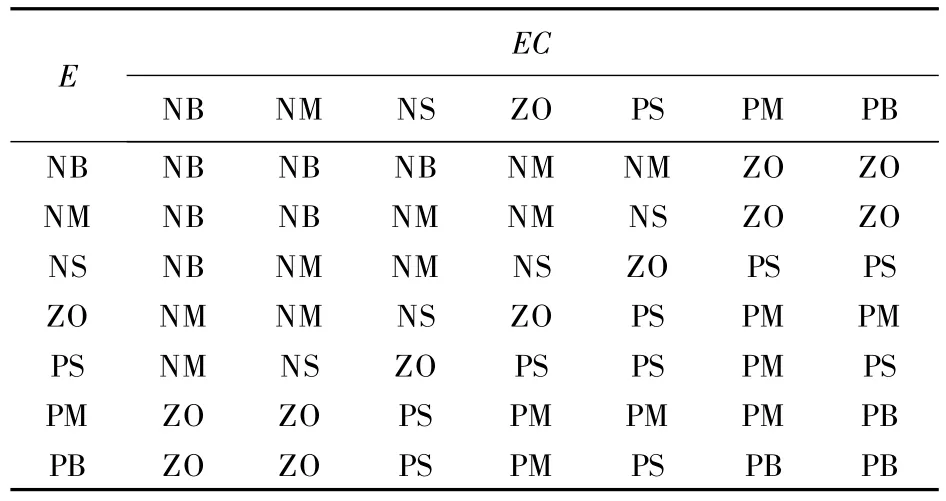
表2 Ki的模糊规则表

表3 Kd的模糊规则表
通常情况下模糊控制器完成时,语言规则和模糊推理即已确定。所以在设计模糊控制规则时要结合操作者的实际经验,不断对控制规则进行调整,直到控制结果满意为止。
2 模糊PID参数自整定算法分析
传统PID控制算法为

其中Kp(k)、Ki(k)、Kd(k)分别为k时刻由控制器调节输出的 Kp、Ki、Kd,根据式(1)、(2)可推导增量公式为

模糊PID控制算法的实现方法是先分析出PID参数与误差E、误差变化率EC之间的关系,然后在过程中不断检测E和EC,根据模糊控制原理不断实时调整PID参数,以满足不同状态下对控制器参数的要求。
定义 Kp、Ki、Kd的参数整定式如下:

式中:Kp、Ki、Kd为 PID 控制器的参数;Kp0、Ki0、Kd0为 PID 控制器初始参数值;ΔKp、ΔKi、ΔKd为PID参数的校正量,由模糊控制器的输出得到。
模糊PID控制,是在传统PID控制的基础上,充分结合模糊控制和PID控制各自的特点,利用模糊控制来自适应地实现PID控制参数的调节。根据给定的角度位置量和舵机返回的角度位置量形成的误差E和误差变化EC,以及其变化趋势,通过模糊推理作出相应决策,对常规PID的三个调节参数进行自整定。将整定后的Kp、Ki、Kd送入PID调节器,形成自适应模糊PID控制器。
3 模糊PID控制器仿真
本文的模糊PID控制方法主要采用MATLAB/FUZZY仿真工具,将预先设计的输入、输出变量的隶属度函数、模糊推理规则和去模糊化方法送入模糊逻辑编辑器,提高系统的运行效率,降低控制系统的复杂性[8-9]。具体方法为:误差E和误差变化EC分别经过量化因子和比例因子处理,并映射到各自的模糊论域中,然后根据所在的模糊等级,在模糊推理规则表中查询应输出的PID参数调节量Kp、Ki、Kd,最后将其作用于常规PID控制器。舵机模糊PID控制器仿真模块如图7所示。
通过仿真,系统响应如图8所示,图中曲线1是PID控制下舵机伺服系统仿真的阶跃响应曲线;曲线2是模糊PID控制下舵机伺服系统仿真的阶跃响应曲线。

图7 模糊PID控制模块仿真

图8 舵机PID与模糊PID控制阶跃响应曲线图
从图8可以看出,在PID控制下的阶跃响应的超调量为3.8%,上升时间为0.15s,稳态时间为0.85s,稳态误差<1%;在模糊PID控制下的阶跃响应的超调量为1.2%,上升时间为0.1s,稳态时间为0.45s,稳态误差<1%。
设在单位阶跃信号输入状态下,采样时间为0.01s,在0.25s时控制系统中加入一个常值干扰,分别对所设计的PID控制算法和模糊PID控制算法的舵机控制系统进行抗干扰仿真分析,对比这两种算法的抗干扰能力,得出仿真图,如图9所示。曲线1是常值干扰时PID控制下舵机伺服系统仿真的阶跃响应曲线;曲线2是常值干扰时模糊PID控制下舵机伺服系统仿真的阶跃响应曲线。

图9 0.25s处加入常值干扰后的响应曲线
由图9可知,经过模糊控制改进的PID控制器对于外加常值干扰具有良好的抑制作用,信号振荡幅度很小,并能很快得到消除。
4 结论
本文针对火箭弹飞行环境的时变性和复杂性,在传统PID算法的基础上,通过模糊控制理论对参数实现自适应调整,提高火箭弹舵机控制系统的精度。对模糊控制器进行设计,并在MATLAB环境中进行仿真。结果表明,采用模糊PID控制算法优于PID控制算法对火箭弹舵机系统的控制效果,同时也克服了火箭弹舵机采用传统PID算法调节Kp、Ki、Kd参数难题。模糊PID控制器的抗干扰能力优于PID控制器,对火箭弹飞行过程中的各种不确定因素有更好的抵抗性和适应性,保证控制系统具有优良的动态特性。
[1]汪军林,解付强,刘玉浩.导弹电动舵机的研究现状及发展趋势[J].飞航导弹,2008(3):42-46.
[2]王强,解艳芳,石丽娜.制导技术在火箭弹上的应用分析[J].飞航导弹,2010(3):71-75.
[3]王志军,尹建平.弹药学[M].北京:北京理工大学出版社,2005.
[4]王耀南.智能控制系统[M].湖南:湖南大学出版社,2006.
[5]张前进.基于Fuzzy-PID的导弹舵机控制系统设计研究[J].弹箭与控制学报,2003,23(3):24-28.
[6]Y.Yang,W.G.Wang.A Fuzzy Parameters Adaptive PID Controller Design of Digital Positional Servo System[C].Proceedings of 2002 International Conference on Machine Learning and Cybernetics,Beijing,2002:310-314.
[7]李全福,万彦辉,郭华.模糊控制算法在电动舵机控制中的应用[J].微电机,2007,40(12):28-30.
[8]谢仕宏.MATLAB R2008控制系统动态仿真实例教程[M].北京:化学工业出版社,2009.
[9]薛定宇,陈阳强.基于Matlab/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002.
猜你喜欢
自动化学报(2019年6期)2019-07-23
天津教育·下(2018年9期)2018-07-13
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
舰船科学技术(2015年8期)2015-02-27
电力自动化设备(2013年11期)2013-09-18
电气电子教学学报(2012年1期)2012-10-12
探测与控制学报(2012年1期)2012-08-27
