高精度太阳能聚光双轴定时跟踪控制系统设计
2012-09-27 01:41汪春华王晓丽
电子设计工程 2012年4期
汪春华,王晓丽,李 彬
(1.西安航空技术高等专科学校 电气工程系,陕西 西安710077;2.洛阳理工学院 电气工程与自动化系,河南 洛阳471023;3.上海大学 电子与信息工程学院,上海200000)
高精度太阳能聚光双轴定时跟踪控制系统设计
汪春华1,王晓丽2,李 彬3
(1.西安航空技术高等专科学校 电气工程系,陕西 西安710077;2.洛阳理工学院 电气工程与自动化系,河南 洛阳471023;3.上海大学 电子与信息工程学院,上海200000)
为提高太阳能电池光电转换效率,设计了不得一种太阳能双轴全自动聚光跟踪控制系统,使可以放多个太阳能电池模块的框架平台可以跟踪太阳光旋转,并保持框架平台上的太阳能电池与阳光入射角保持垂直,以达到光能的最大获取率。在考虑太阳的运动轨迹模型的基础上,设计出可以同时跟踪太阳轨迹的二轴框架平台结构,方位轴和俯仰轴。在考虑晴天和阴天等复杂天气情况下,设计太阳运行轨迹跟踪方式和光传感器跟踪方式相结合的自适应智能跟踪方法,全自动地准确跟踪太阳的位置,跟踪精度小于0.4°,最大限度的接收太阳能,提高了太阳能光电转换的效率。
太阳能聚光;光伏组件;高精度跟踪;伺服控制
太阳能光伏发电作为太阳能利用的主要方式之一,因其资源潜力大、可持续利用等特点,成为各国竞相发展的重点[1]。近年来,随着太阳电池成本下降,光伏发电已成为太阳能利用中最具活力的领域,而提高光伏发电装置的转换效率是进一步利用太阳能、降低成本的重要课题[2]。为了提高光伏发电系统的转换效率,提高发电系统的发电量,需要提高光伏阵列吸收太阳辐射能量的能力。其主要解决途径是使光伏组件的框架平台受光面能正对太阳,使相同的辐照条件下比固定安装的光伏组件能吸收更多的太阳辐射能量[3]。国内外的研究主要集中在最佳倾角固定安装和自动跟踪装置,成本最低的最佳倾角固定安装光伏阵列[4],由于太阳光入射角随昼夜、季节变化,光伏组件阵列不能充分吸收太阳辐射的能量,且由于光伏组件聚光后产生的高温,有可能反而造成不必要的损失。
文中在考虑太阳的运动轨迹模型的基础上,设计出可以同时跟踪太阳轨迹的两轴框架平台结构。采用太阳轨迹自动跟踪系统随时根据太阳的运行轨迹调整阵列表面位置以减小入射角,在相同的辐照条件下吸收比固定安装光伏阵列更多的太阳辐射能量。在考虑晴天和阴天等复杂天气情况下,运用太阳运行轨迹跟踪方式和光传感器跟踪方式相结合的自适应智能跟踪方法,全自动地准确跟踪太阳的位置,最大限度的接收太阳能,提高了太阳能光电转换的效率。
1 太阳运动轨迹及平台框架结构
1.1 太阳运动轨迹
太阳轨迹跟踪系统的运行原理为:依据天体运行规律,实时计算出太阳对应于当地时间、经度、纬度的与水平面相对的方位角和俯仰[5],进而通过电机驱动框架平台按照确定的角度运行,以使光伏组件正对太阳光的最强点。
在太阳能利用文献中有大量的文献[6-7],涉及太阳位置的算法上述算法有些简单,有些复杂。但无论算法的简单与否,最终均需计算出太阳的赤纬角、当地太阳时角,并以此为变量,利用球面三角公式或矢量法计算太阳视位置的地平坐标(方位角、俯仰角)。太阳位置地平坐标计算通用公式如下所示:
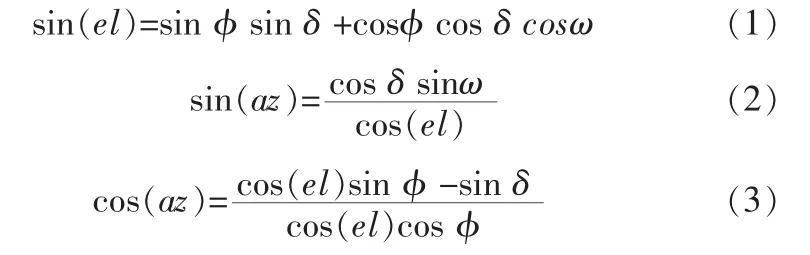
其中,el是太阳高度角;az是太阳方位角;δ是太阳赤纬角;ω是太阳时角;φ是当地纬度。
由以上公式可知,太阳赤纬角、太阳时角的估算与太阳位置的计算密切相关,其估算精度直接影响太阳位置的计算精度。其中太阳赤纬角δ是太阳光线与地球赤道的夹角(以北为正)。一年内,太阳赤纬角在之间变动。要确定某一天的太阳赤纬角,可以利用下面的公式来进行近似的计算:

其中,DAY为式中:DAY为从1月1日起,到该天的天数。
由于外界自然环境复杂多变,天空中飞起的树叶或生活垃圾,以及云层的运动都会对传感器检测造成干扰,使跟踪器产生很大的跟踪误差。所以采用这种高精度太阳能跟踪控制器可以提高跟踪的精度和抗干扰能力。
1.2 平台框架结构
全自动太阳能聚光跟踪控制系统主要分为太阳能电池模块框架平台和太阳能自动跟踪控系统。太阳能自动跟踪系统主要用于驱动太阳能电池板框架。早晨太阳升起,太阳能电池板框架由初始位置自东向西自动跟随太阳相对运动的方向,按间歇方式分段转动,从而使光伏发电系统的太阳能电池板框架保持在较大的功率输出状态。日落后,太阳能电池板框架回转复位至初始位置,并处于休眠状态。框架的机械部分采用双轴机械跟踪定位方式。主要由电池板框架平台、底座、两个转动轴(方位轴、俯仰轴)和直流电机构成。整个太阳能电池板安装在框架平台上。跟踪装置设计成双轴机械跟踪定位系统,可以同时在方位角和俯仰角两个方向上同时进行位置跟踪。在驱动电路的作用下可以使电池板框架平台在水平方向上0~270°和垂直方向上的0~85°自由旋转,以满足全天的太阳轨迹跟踪。太阳能电池板平台框架示意图如图1所示。
2 跟踪控制系统设计
2.1 系统硬件设计

图1 太阳能电池板平台框架示意图Fig.1 Solar panel platform frame diagram
太阳自动跟踪控制系统主要由单片机最小系统、传感器信号处理电路、电机驱动电路等几部分组成。整个控制系统可以完成如下功能:在设计跟踪时间内都能正对太阳;夜间自动返回原始工作位置;在转动机构失效时,使框架平台停止工作运转;间歇性工作方式,降低能耗。 单片机选择的是美国Cygnal公司推出的高性能C8051F020系列单片机,主要考虑到其具有极佳的最小功耗设计环境[8]。聚光跟踪控制系统硬件组成图如图2所示。

图2 聚光跟踪控制系统硬件组成图Fig.2 Condenser tracking control system hardware diagram
2.2 系统软件设计
全自动太阳跟踪器具有两种可自行切换的跟踪方式:传感器跟踪方式和太阳运行轨迹跟踪方式。传感器跟踪方式是通过光电转换器实时采样,计算机分析比较太阳光强的变化,从而驱动机械机构实现太阳跟踪的方式。太阳运行轨迹跟踪方式是根据当地的地理位置和时间来确定太阳的位置进行跟踪太阳。在本系统里,这两种方式自行切换,互相配合,实现了高精度的全天候太阳的自动跟踪。
需要说明的是,系统初始化模块在整个系统的设计过程中是非常重要的。它主要完成两个功能:系统的资源配置和平台框架基准位置的搜索。确定平台框架的基准位置是十分必要的。在系统运行过程中,偶尔的掉电是可能的。系统再加电时会因无法确定当前平台框架的位置,而产生严重的错误;另外,日落后系统需要按原路线返回至基准位置,以避免电缆的缠绕和减小因平台框架的加工精度而产生的误差累积,这也要求系统必须有一个可以确定的基准位置。
3 设计应用与结果分析

图3 聚光跟踪控制系统软件流程图Fig.3 Concentrator tracking control system software flow
太阳能聚光双轴定时跟踪控制系统的现场运行为:测试时间为2010年12年某日,地点在我国南方某市。经过现场安装调试和多次重复测试,测试结果如表1所示。当天气晴好时,跟踪控制系统可以跟踪太阳轨迹。从实验结果分析可行,此全自动跟踪控制系统精确度和稳定性能够很好地满足野外现场高精度对太阳轨迹跟踪的实际。但是,对于控制系统的全方面测试和防雨水、防风、防雷击等等的试验任务,还需要进一步的开展研究。

表1 跟踪控制系统误差表Tab.1 The errors of tracking control system
4 结束语
文中在考虑太阳的运动轨迹模型的基础上,进行了基于单片机C8051F020的高精度双轴全自动太阳能聚光跟踪控制系统软硬件设计,不仅可以实现大范围高精度的跟踪太阳轨迹,而且即便遇到多云天气跟踪系统也能安全可靠的运行,提高了太阳能光电转换的效率[9]。现场安装调试和多次重复测量的结果表明本文采用方法正确,可靠。同时,对于控制系统的全方面测试,目前已经论证充分且经过实验室试验,正在进一步的开展现场应用研究过程中。
[1]高峰,孙成权,刘全根.太阳能开发利用的现状及发展趋势[J].世界科技研究与发展,2001,23(4):35-391.
GAO Feng,SUN Cheng-quan,LIU Quan-gen.The status and trends of solar energy utilization[J].World Sci-tech R&D,2001,23(4):35-391.
[2]Johnston D.Solar energy systems installed on Chinese-style buildings[J].Energy and Buildings,2007,39(4):385-3921.
[3]Motoh N,Ohno M,Lnoue T.A method for MPPT control while searching for parameters corresponding to weather conditions for PV generation systems[J].IEEE Transactions on Industrial Electronics,2006,53(4):1055-1065.
[4]Denman D,Mcneil W.Multi-axial servo hydraulics controls compaction press[J].Hydraulics&Pneumatics,2000:27-29.
[5]饶鹏,孙胜利,叶虎勇.两维程控太阳跟踪器控制系统的研制[J].控制工程,2004(5):542-543.
RAO Peng,SUN Sheng-li,YE Hu-yong.Development of control system of two-axis automatic solar-tracker[J].Control Engineering of China,2004(5):542-543.
[6]Grena R.An algorithm for the computation of the solar position[J].Solar Energy,2008,82(5):462-470.
[7]Reda I,Andreas A.Solar position algorithm for solar radiation applications[J].Solar Energy,2004(76):577-589.
[8]潘琢金(译).C8051F020/1/2/3混合信号ISP FLASH微控制器数据手册[EB/OL].[2011-12-29]http://www.xhl.com.cn,v 1.4,2005.
[9]李长敏.基于压力变送器及智能仪表的箱压自动控制技术[J].火箭推进,2011(1):57-60.
LI Chang-min.Automatic control technology of tank pressure based on pressure transmitter and intelligent instrument[J].Journal of Rocket Propulsion,2011(1):57-60.
High-precision dual-axis solar concentrator tracking control real-time system
WANG Chun-hua1, WANG Xiao-li2, LI Bin3
(1.Department of Electrical Engineering,Xi’an Aerotechnical College,Xi’an710077,China;2.Department of Electrical Engineering and Automation,Luoyang Institute of Science and Technology Luoyang471023,China;3.School of Electronics and Information Engineering,Shanghai University,Shanghai200000,China)
For improving the conversion efficiency of solar battery module,the high-precision two-axis autonomous solar spotlight tracking control system is designed.The framework platform which places multiple solar battery modules can track the sun rotating,and maintain perpendicular to the sun to achieve the solar battery modules maximum access rate of light energy.Referring to the tracking model of the sun,the two-axis tracking framework platform structure is designed which can track the sun simultaneously,at the azimuth axis and the pitch axis.With considering the complex weather conditions of sunny and cloudy,etc.,the sun tracking mode employs adaptive intelligent combination method of tracking mode by optical sensors and accurate tracking the location of the sun by calculations,the tracking accuracy is less than 0.4°to the maximum receive the solar energy,and improve the efficiency of photovoltaic conversion of solar energy.
solar concentrator; solar battery module; high-precision tracking; servo control
TP273
A
1674-6236(2012)04-0088-03
2011-12-30 稿件编号:201112162
国家科技型中小企业技术创新基金(09C26224124722)
汪春华(1981—),男,四川广元人,硕士。研究方向:控制理论及应用。
猜你喜欢
军事文摘(2021年18期)2021-12-02
文萃报·周二版(2019年48期)2019-09-10
中学生数理化·八年级物理人教版(2018年12期)2019-01-31
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
电子制作(2018年12期)2018-08-01
知识就是力量(2017年12期)2018-01-15
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17