
PMSM调速系统键合图建模与分析
2012-11-22 01:25程广伟
火炮发射与控制学报 2012年2期
黄 克,程广伟,蔺 韬
(西北机电工程研究所,陕西 咸阳 712099)
永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)具有良好的控制特性、结构简单、运行可靠、体积小、质量小以及效率和功率因素较高等优点,应用领域十分广泛。论文对某中口径转管自动机PMSM调速系统进行了建模和分析。转管自动机具有被驱动的质量大、转速高、射速高、消耗功率大的特点,其驱动功率是重要参数指标,驱动电机须满足战术技术指标要求(如射速指标和启动时间指标)。键合图法在对多能域系统建模具有优势,故采用键合图对自动机的调速系统进行建模分析,为设计过程驱动功率的选取提供一种仿真验证的方法。
1 键合图基本理论
键合图是依据能量守恒的基本原则,通过功率流用一些基本元件以一定的连结方式用规定的符号来表示的图形。键合图理论将多种物理参量统一的归纳为4种广义变量,即势变量e(t)、流变量f(t)、广义动量p(t)和广义位移q(t)(见表1)。因此,键合图可以由统一的方式对多能域的物理对象得到模型。正是基于此,本文选择键合图法对PMSM调速系统进行仿真分析[1-2]。
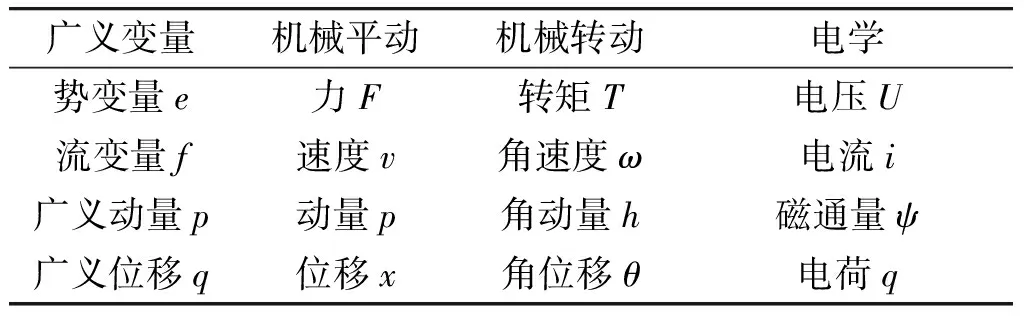
表1 广义变量与机械变量、电变量的对应关系
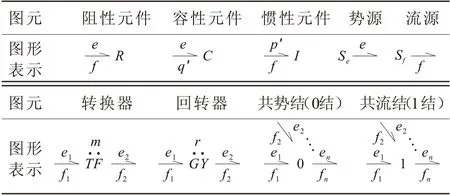
键合图元是构成键合图的基本元素。在键合图中几种基本元件就能统一的表达多能域系统的模型。表2列出了键合图中的基本键合图元。
表2基本键合图元介绍
2 某中口径转管自动机身管电机驱动控制系统技术方案
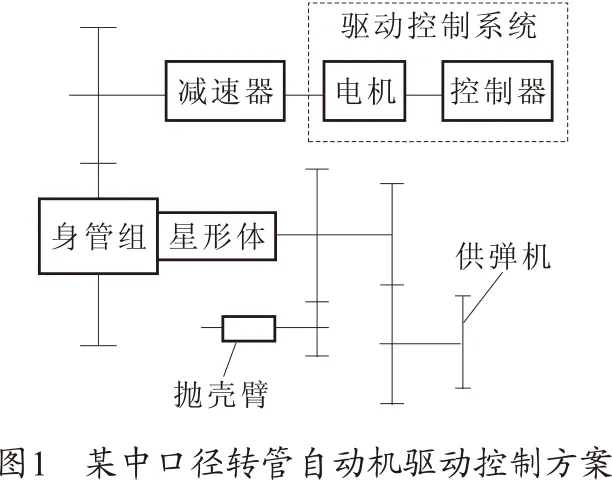
某中口径转管自动机的外能源驱动力采用双电机,通过减速器将动力传给整个身管组,带动星形体(含炮闩)、供弹机、抛壳臂运动,完成自动机射击循环。其驱动控制方案图如图1。
驱动电机采用永磁同步电动机,功率50 kW,额定转速6 000 r/min,额定扭矩79.6 N·m。该电机是由电励磁三相同步电动机发展而来,用永磁体代替了电励磁系统,从而省去了励磁绕组、集电环和电刷,而定子与电励磁三相同步电动机基本相同,便于矢量控制[3]。其控制系统方案采用电流环和速度环双环调速系统,并采用具有快速电流控制环的电流可控PWM(Pulse Width Modulation)逆变器。PMSM调速系统简化方块图如图2所示。图中,ω0表示预期转速,Te和ω分别为电机输出转矩和转速。
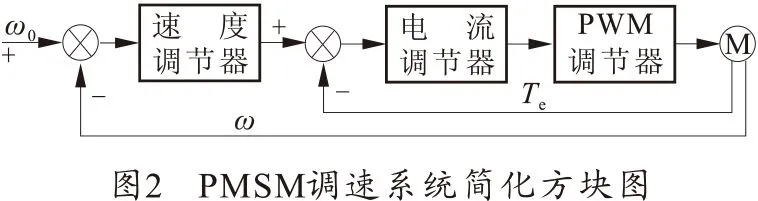
速度和转矩调节器采用比例积分调节器。转速调节器的作用是对给定速度与实际速度之差按照一定的规律进行运算,并通过运算结果对电动机进行调速控制。电流调节器的作用一是在启动和大范围加减速时起到电流调节和限幅的作用;二是使系统的抗电源扰动和抗负载扰动的能力增加。若没有电流环,扰动会使绕组电流随之波动,使电动机的速度受到影响。采用电流调节器会显著提高系统调速性能[4-5],保证自动机射速达到设计指标,且射速稳定。
3 PMSM调速系统键合图模型建立
3.1 PMSM键合图模型建立
3.1.1 PMSM模型简化
为了简化PMSM模型,假设如下:忽略定、转子铁心磁阻,不计涡流和磁滞损耗;永磁材料的电导率为零,永磁体内部的磁导率与空气相同;转子上没有阻尼绕组;永磁体产生的励磁磁场和三相绕组产生的电枢反应磁场在气隙中均为正弦分布。稳态运行时,相绕组中感应电动势波形为正弦波。
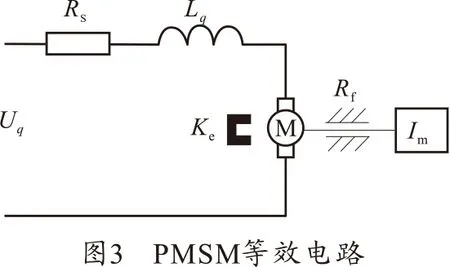
基于上述假设,将永磁励磁磁场轴线定义为d轴,q轴顺着旋转方向超前d轴90°的角度。采用矢量控制时,d轴的电流分量id和q轴的电流分量iq之间的空间矢量夹角始终是90°。令id=0,此时电机转矩与iq近似成正比关系,得到电机等效电路如图3所示[6]。图中,Uq为q轴控制电压,Rs为定子电阻,Lq为q轴电感,Ke为电磁转矩系数,Rf为转子摩擦阻尼系数,Im为转矩输出部分的转动惯量。
3.1.2 PMSM键合图模型
根据图3可知,定子电阻用阻性元件R表示、q轴电感用惯性元件I表示,由电到机械的转换部分用回转器GY表示,机械转动部分所受的摩擦阻力也用阻性元件R表示,转动惯量用惯性元件I表示。流过定子电阻、q轴电感以及回转器的电流相等,用共流结(1结)把Uq、Rs、Lq和GY连接起来。机械部分各元件都具有相同的角速度,用1结将它们连接起来,得到PMSM键合图模型图4[7]。

3.2 PMSM调速系统键合图模型
根据PMSM调速控制系统简化方块图(图2),建立调速系统整体键合图模型如图5所示。
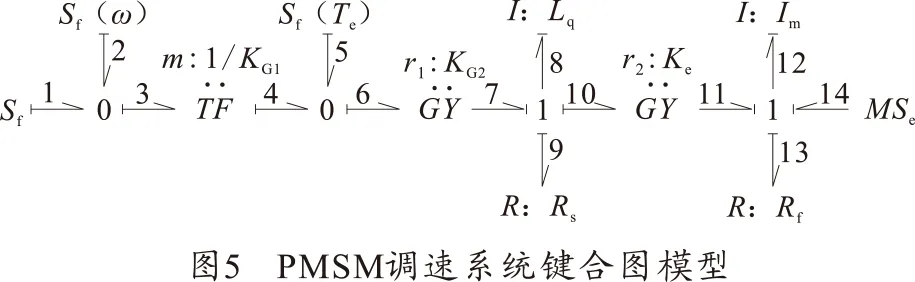
图中,目标转速Sf和实际转速的反馈量Sf(ω)均为流变量,用0结连接两者,得到它们的差值通过速度调节器。
为避免状态方程严重耦合,将比例积分调节器简化为比例调节器作为TF变换器建立键合图,由此造成一定的系统误差,可在仿真时增大比例系数减小系统误差,使仿真结果逼近实际系统。
将速度调节器得到的信号与实际转矩的反馈量Sf(Te)作差值,输入到电流调节器,用GY回转器表示,该回转器将速度值这个流变量转变为势变量的控制电压值。GY回转器后的势变量即为PMSM的q轴控制电压,电机后的负载用变化的势源MSe表示。KG1、KG2分别为速度调节器和电流调节器的比例系数。
键合图的功率流向(键上半箭头的指向)是根据实际物理模型画出的。因果关系是根据键合图各元素因果关系规则确定,所有键合图元都具有积分因果关系。对图中所有的键进行编号作为下标。例如标号为1的键上的势变量和流变量分别为e1和f1。
3.3 PMSM调速系统状态方程
根据图5所示模型,取状态变量X=[p8,p12]T,输入变量U=[f1,f2,f5,e14]T,输出变量Y=[e11,f11]T。其中p8为电机的磁通量,p12为电机动子的角动量;f1,f2,f5,e14分别是目标转速、实际转速的反馈量、实际转矩的反馈量和负载;e11,f11表示电机输出转矩和转速。对状态变量求导得到:
(1)
根据键合图元的定义和因果关系有:
(2)
将式(2)代入式(1)可以整理得到状态方程:
(3)
输出变量表达式为:
(4)
4 仿真与分析
式(3)为一阶微分方程组,选用具有4阶精度的龙格-库塔法对其进行求解。使用MATLAB编程进行计算。计算中所用到的参数值如下:Uq为q轴控制电压,Rs=0.019Ω,Lq=1 mH,Ke=0.723 6 N·m/A,Rf=0.986 N·m/(rad/s),Im=0.048 kg·m2,目标转速Sf=6 000 r/min。在60 ms时施加150 N·m的冲击载荷,持续时间1.5 ms。仿真结果如图6所示。
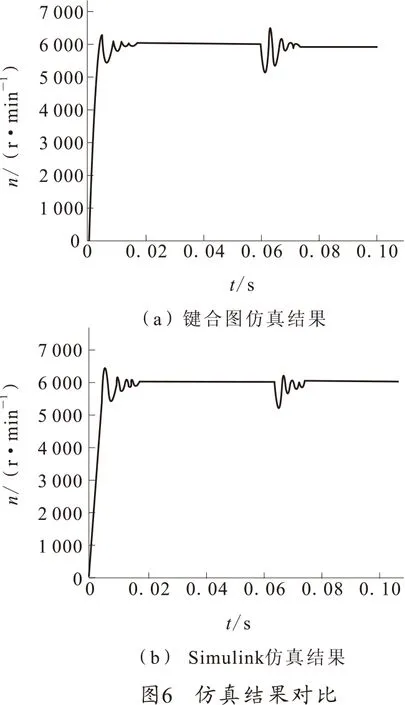
由图6(a)可知,电机在空载启动的情况下,可以较快的到达额定转速,超调量为6.1%。在较大的冲击载荷作用下,电机可以短时间恢复到额定转速,这对于武器系统的运行至关重要。将结果与根据相关实验建立的基于MATLAB/Simulink的PMSM调速系统仿真结果(如图6(b)所示)对比。Simulink的调速系统中使用的是比例积分调节器,超调量为7.2%。对比可以看到两仿真结果相似,可以认为建立的键合图模型正确。
5 结束语
通过分析PMSM调速系统的键合图模型,并对其进行了仿真分析,验证了模型的可行性。本文使用键合图直接对PMSM调速系统整体建立了键合图模型,并对得到的状态方程进行了直接编程求解,而不必再使用其他软件重新搭建键合图模型,简化了步骤,提高了效率。本文所建立的键合图模型,可以与武器系统的机械部分的键合图一同建立,
成为一个整体的机电控制一体模型,使用键合图一种方法便可以对整个系统动力学进行完整的分析,而这种分析是非常需要并具有重要意义的。
参考文献(References)
[1] 王中双.键合图理论及其在系统动力学中的应用[M].哈尔滨:哈尔滨工程技术大学出版社,2000:1-13.
WANG Zhong-shuang. Bond graph theory and its application in systematic dynamics[M]. Harbin: Harbin Engineering University Press,2000:1-13. (in Chinese)
[2] 钟掘.复杂机电系统耦合设计理论与方法[M].北京:机械工业出版社,2007:48-50.
ZHONG Jue. Coupling design theory and methods of complex electromechanical systems[M]. Beijing: China Machine Press,2007:48-50. (in Chinese)
[3] 王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2008:103-108.
WANG Cheng-yuan,XIA Jia-kuan,SUN Yi-biao.Modern control technology for electric machines[M]. Beijing: China Machine Press,2008:103-108. (in Chinese)
[4] 董景新,赵长德,熊沈蜀,等.控制工程基础[M].2版.北京:清华大学出版社,2003:248-256.
DONG Jing-xin, ZHAO Chang-de, XIONG Shen-shu, et al. Introduction to control engineering[M].2nd.Beijing: Tsinghua University Press,2003:248-256. (in Chinese)
[5] 袁登科,陶生桂.交流永磁电机变频调速系统[M].北京:机械工业出版社,2011:153-156.
YUAN Deng-ke, TAO Sheng-gui. Frequency conversion and speed regulation system of AC permanent magnet motor[M]. Beijing: China Machine Press,2011:153-156. (in Chinese)
[6] 孙立宁,李腾,刘延杰.高加速精密直线电机运动平台键合图建模与分析[J].机器人,2011,33(4) :467-474.
SUN Li-ning, LI Teng, LIU Yan-jie. Modeling and analysis of a high acceleration and precision linear motor direct drive motion stage with bond graph approach[J]. Robot,2011,33(4) :467-474. (in Chinese)
[7] 李腾, 刘延杰,孙立宁,等.考虑端部效应的永磁直线同步电机键合图建模[J].电机与控制学报,2011,15(2):71-75.
LI Teng, LIU Yan-jie, SUN Li-ning, et al.Bond graph approach to the modeling of permanent linear synchronous motor with consideration of end-effect[J].Electric Machines and Control,2011,15(2):71-75. (in Chinese)
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
防爆电机(2021年5期)2021-11-04
上海大中型电机(2021年2期)2021-07-21
宇航计测技术(2018年3期)2018-09-08
电机与控制学报(2018年9期)2018-05-14
汽车与新动力(2015年1期)2015-02-27
汽车电器(2014年8期)2014-02-28
