
基于SVPWM 的永磁同步电动机直接转矩控制
2013-03-04 05:23杨秀芹邹开凤张晓杰
防爆电机 2013年6期
杨秀芹,邹开凤,张晓杰
(海军航空工程学院青岛校区,山东青岛266041)
0 引言
DTC 理论于20 世纪80 年代由德国学者M.Depenbrock和日本学者I.Takahashi 首先针对异步电动机提出,90 年代Zhong.L,Rahman MF,Hu.YW 等学者提出PMSM DTC 理论[1]。与矢量控制相比,由于DTC 系统具有控制系统结构简洁、转矩动态响应快、对电机参数依赖少、对电动机参数变化鲁棒性好等优点[2]受到普遍关注。传统DTC 技术在永磁同步电机上的研究还并非十分完善,在有些方面仍存在欠缺,如出现较大的定子磁链和转矩脉动、开关频率发生变化而不恒定、功率器件的容量无法得到充分利用等[3]。
目前,多种脉宽调制技术在电压源型逆变器供电的交流电动机控制系统中得到了广泛应用,其中,SVPWM 以较高的直流电压利用率、较低的开关谐波、易于数字实现等优点而备受青睐[4、5]。Habetler 在1991 年把SVPWM 技术引入到异步电机DTC 中,运用SVPWM 技术来减小电动机转矩的脉动,这种方法从根本上摒弃了开关表的概念;从控制效果上看,这种方法可以有效地解决滞环控制器所引起的转矩和磁链脉动等一系列问题。在其后一段时间内,基于SVPWM 的直接转矩控制策略已广泛应用于异步电动机调速领域[6-8]。
本文拟采用SVPWM 技术实现PMSM 的直接转矩控制,在定子磁链ψs幅值保持恒定的情况下,通过控制转子磁链ψf和定子磁链ψs间负载角δsm的增量Δδsm来控制电磁转矩Te的增量ΔTe,从而达到控制电动机转速的目的,并通过仿真研究磁链和转矩脉动情况,并与传统的DTC 进行比较。
1 基于SVPWM 直接转矩控制原理
传统DTC 系统通过将电动机给定转速和实际转速的误差,经PI 调节器输出作为转矩的给定信号;同时系统根据检测的电动机三相电流和电压值,利用磁链模型和转矩模型分别计算电动机的磁链和转矩的大小,计算电动机转子的位置、电动机给定磁链和转矩与实际值的误差;最后根据它们的状态选择逆变器的开关电压矢量,使电动机能按控制要求调节输出转矩,最终达到调速的目的[9]。其原理框图如图1 所示。
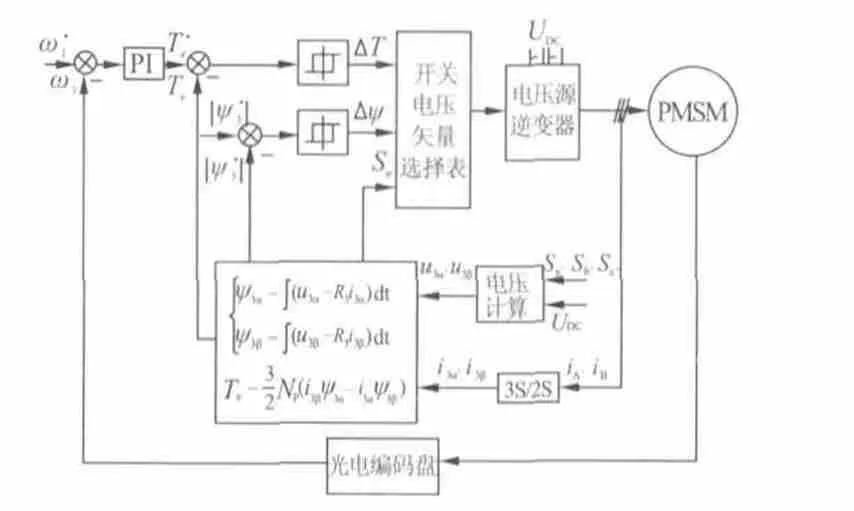
图1 传统DTC 系统原理图
SVPWM 是在传统DTC 策略的基础上将每一扇区再分成若干个对应于时间PWM 周期的小区间,按照线性组合、三段逼近等方式获得电压空间矢量Us来获得逼近圆形的旋转磁场。图2 是一个典型的三相电压源逆变器模型,直流母线电压为UDC,六个开关管分别用理想开关1 ~6 组成a、b、c 三个桥臂,每个桥臂上下开关管互锁导通,分别用开关变量Sa、Sb、Sc来表示a、b、c 三个桥臂开关管开关情况。

图2 三相电压型逆变器结构简图
相应的逆变器输出电压空间矢量可表示为

开关变量Sa、Sb、Sc的不同组合决定了该种逆变器只能输出八个电压矢量,其中有六个运动矢量u1~u6和两个零矢量u0、u7的分布如图3 所示。

图3 输出的空间电压矢量
针对不同的电压空间矢量和相应不同的作用时间,采用线性组合的方法将其合成所需要相位的磁链增量,进而很好地跟踪定子磁链,使其形成近似圆形的磁场。电压空间矢量合成原理如图4所示。u4、u6为相邻电压矢量,t4、t6为其作用时间,T0为采样周期,us为期望电压空间矢量。

图4 电压空间矢量的线性组合
设T0=t4+t6+t0或T0=t4+t6+t7为系统PWM 周期,t0(t7)、t4和t6分别为每个周期内u0(u7)、u4、u6的作用时间,则t0(t7)、t4和t6分别为

这里为了减少功率开关器件的开关次数,一般使u0、u7各占一半时间。
基于SVPWM 的PMSM DTC 系统的运行过程可以归纳为:在传统DTC 原理的基础上,将测量所得的电动机端电压、电流变量通过坐标变换计算出定子磁链和转矩观测值,通过参考电压矢量计算模型计算出为消除转矩、磁链误差所需的参考电压矢量usα、usβ,再用一个SVPWM 单元合成开关电压矢量us,将调制过程中产生的一系列开关信号送入逆变器,实现转矩、磁链的平滑控制。
2 基于SVPWM DTC 系统的实现
2.1 基于SVPWM DTC 系统组成
基于SVPWM 的PMSM DTC 系统的结构如图5所示。在这个控制系统中包括两个PI 调节器:转速调节器(ASR)和转矩调节器(ATR),预期电压矢量计算模型、SVPWM 模型、电压源逆变器模型、3s/2s 变换模型、磁链估算模型、转矩估算模型等模块。对于SVPWM 模块和传统DTC 系统建模在文献[5]、文献[9]中已分别作了详细介绍。如何将传统DTC 原理和SVPWM 技术相结合是本文所要研究的重点,即预期电压矢量模型。
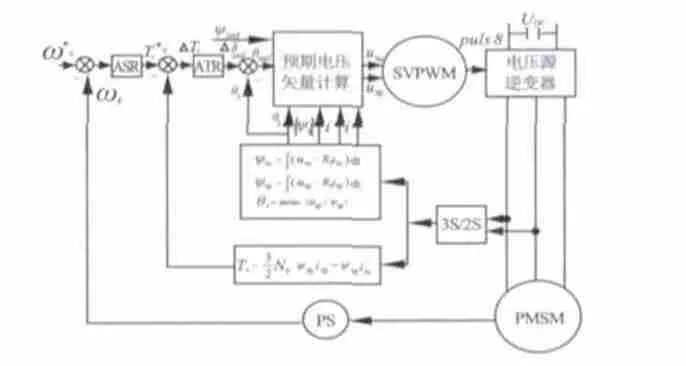
图5 基于SVPWM 的PMSM DTC 系统框图
2.2 预期电压矢量计算模型
在dq0 旋转坐标系下PMSM 的数学模型为

式中,usd、usq—定子电压d、q 轴分量;isd、isq—定子电流d、q 轴分量;Ld、Lq—定子绕组d、q 轴等效电感;ψs—定子磁链;ψf—转子磁链;Rs—定子绕组电阻;p—微分算子;ωr—转子机械角速度;δsm—负载角,即ψs和ψf间的电角度;Np—电机极对数;Te—电磁转矩。
由式(4)可以看出,当定子磁链ψs的幅值 ψs保持恒定时,负载角δsm的增量Δδsm就决定了电磁转矩Te的增量ΔTe。再对式(4)两边求导可得

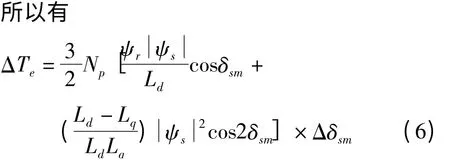
图6 为定子αβ 坐标系中负载角增量Δδsm的示意图。由此可知,在定子αβ 坐标系中的空间相位角θsref=θs+Δδsm,其中θs为定子磁链矢量ψs在定子αβ 坐标系中的空间相位角,Δδsm为负载角δsm的增量。为了获得转矩增量ΔTe,定子磁链矢量ψs的旋转速度应大于转子磁链矢量ψf;而DTC 就是为了获得理想的开关电压矢量us从而控制ψs的速度变化,产生一个负载角增量Δδsm,使得定子磁链矢量ψs运动到新的位置ψsref。

图6 定子αβ 坐标系中的负载角增量Δδsm
在定子αβ 坐标系内,容易得到

式中,usα、usβ—定子电压α、β 轴分量;isα、isβ—定子电流α、β 轴分量;ψsα、ψsβ—定子磁链α、β 轴分量;ΔT—采样时间。
图7 是参考电压矢量usα、usβ的计算框图。由式(6)可以容易得知,ΔTe与Δδsm之间具有非线性关系,也就是说Δδsm是能使实际转矩Te跟踪给定转矩所需要的负载角δsm的增量值,所以在图7的转矩偏差ΔTe与Δδsm负载角增量设置了PI调节器。

3 仿真结果
为了验证基于SVPWM 的PMSM DTC 策略的有效性,在Matlab/Simulink 环境下对其进行仿真研究。仿真主要参数设置如下:定子电阻Rs=1.2Ω,电机极对数Np=4,电机直、交轴电感Ld=Lq=8.5mH,给定的定子磁链额定值ψs=0.175Wb,电机转动惯量J=0.0008kg·m2,直流母线电压 UDC=300V,PWM 调制频率设为10kHz。传统DTC 系统PI 调节器参数设计为:Kp=2,Ki=0.25,限幅值为±10,转矩滞环参数为[-0.01,0.01],磁链滞环参数为[-0.001,0.001];基于SVPWM DTC 系统ASR、ATR 参数分别为:Kpl=5,Kil=0.25,Kp2=0.1,Ki2=0.2,限幅值分别为±4,±0.1。
在t=0s 时,转速由0 突加为500r/min,负载转矩为1N·m 恒转矩运行;在t=0.1s 时,转速由500r/min 突增至 600r/min,负载转矩保持为1N·m;在t=0.2s 时,转速保持为600r/min,负载转矩由1N·m 突增至3N·m,得到相应的电动机转速、定子磁链轨迹、定子磁链随时间变化曲线、定子两相电流、电动机转矩动态性能仿真图分别如图8、图9、图10、图11、图12 所示。

图8 电动机转速动态响应曲线

图9 定子磁链轨迹



图12 电机转矩动态响应仿真图
从图8、图9、图10、图11、图12 可以看出,与传统DTC 相比,基于SVPWM DTC 系统磁链脉动明显减小且磁链圆更平滑;两种控制策略在转速和负载分别突变的情况下,定子两相电流在很短的时间内都能恢复稳态,但基于SVPWM DTC 策略两相电流的正弦度要比传统DTC 策略下好很多,转矩脉动也明显降低。
4 结语
本文在分析传统DTC 原理以及SVPWM 技术的基础上,实现了基于SVPWM 策略的PMSM DTC 系统。该控制系统通过跟踪磁链和转矩误差值来选择合适的电压空间矢量以消除误差,从而很好地控制电机转速,弥补了传统DTC 系统中磁链、转矩脉动大的不足。仿真结果表明,无论在定子电流正弦度,还是磁链、转矩脉动问题方面,基于SVPWM 的PMSM DTC 策略均优于传统的PMSM DTC 策略。
[1] 周扬忠,胡育文. 交流电动机直接转矩控制[M].北京:机械工业出版社,2009,10.
[2] 熊祥,郭丙君.基于双模态控制的交流异步电机直接转矩控制系统[J]. 华东理工大学学报,2010,36(3):438-442.
[3] M.Chen,H.Y.Gao,H.M.Song.Simulation Study on a DTC System of PMSM.The 6th International Forum on Strategic Technology,Vol.1,pp.564-569,2011.
[4] 程小猛,陆海峰,瞿文龙,等. 一种减小SVPWM 线性调制区损失的方法[J]. 清华大学学报,2009,49(11):1861-1865.
[5] Z.G.Wang,J. X. Jin,Y. G. Guo,etc al. Modeling and Simulation of PMSM Control System Based on SVPWM[J].Proceedings of the 27 Chinese Control Conference,2008,724-728.
[6] 孟庆春,叶锦娇,郭凤仪.异步电动机直接转矩控制系统的改进方案[J].中国电机工程学报,2005,25(13):118-122.
[7] 魏欣,陈大跃,赵春宇.一种基于占空比控制技术的异步电动机直接转矩控制方案[J]. 中国电机工程学报,2005,25(14):93-97.
[8] 胡虎,李永东.基于区域电压矢量表的交流异步电动机直接转矩预测控制策略研究[J]. 电工技术学报,2004,19(2):25-30.
[9] 谢运祥,卢柱强. 基于MATLAB/Simulink 的永磁同步电机直接转矩控制仿真建模[J]. 华南理工大学学报,2004,32(1):19-23.
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
当代陕西(2022年6期)2022-04-19
中学生数理化·中考版(2019年9期)2019-11-25
电信科学(2016年9期)2016-06-15
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
舰船科学技术(2015年8期)2015-02-27
电子设计工程(2015年16期)2015-02-27
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04