
粗糙集-神经网络与证据理论融合推理的综合故障诊断方法研究*
2013-03-09 08:14吴晓平辛登松
武汉理工大学学报(交通科学与工程版) 2013年1期
杨 广 吴晓平 辛登松 李 庆
(海军91918部队1) 北京 102300) (海军工程大学信息安全系2) 武汉 430033)
在故障诊断过程中,为了提高诊断的精度和可靠性,应用信息融合技术,融合多传感器数据及其他途径的信息,以求更准确、全面地认识和描述诊断对象,从而做出正确的判断和决策[1-2].神经网络具有大规模并行处理和分布式信息存储能力、良好的自适应、学习、联想、容错功能,但用神经网络进行信息融合,其拓扑结构的确定是个难点,如网络的规模过大,过量的冗余数据不仅导致网络训练速度过慢、训练时间过长,而且易限于局部极小[3].证据理论具有比概率论更弱的公理体系和更严谨的推理过程,能够更加客观的反映事物的不确定性[4-5],但用证据理论进行信息融合,其基本可信度分配的主观性仍然是一个亟须解决的问题[6].
本文分析了粗糙集、神经网络、证据理论信息融合方法各自优缺点,运用综合集成原理,将三者进行有机的融合,提出了3种方法融合推理的综合故障诊断策略.即用粗糙集理论对原始征兆数据进行预处理,进行数据层融合,约简冗余信息,提取关键特征;再运用并行集成神经网络对粗糙集融合处理后的特征数据进行特征层融合,可有效的简化各个神经网络结构,缩短网络训练时间,获得网络的局部诊断结果(每个局部诊断结果形成一个证据体),并得到基本可信度分配的客观化方法;最后运用D-S证据理论对各局部诊断结果(各证据体)进行决策层融合,得到综合诊断结果.
1 诊断系统结构及原理分析
1.1 诊断系统结构
综合诊断系统共分为3大模块:数据预处理模块、神经网络初级局部诊断模块、D-S证据理论决策融合诊断模块.诊断系统的结构见图1.
1.2 数据层融合
诊断系统由数据预处理模块通过粗糙集对特征参数进行属性约简和特征知识提取,提取诊断关键参数,剔除冗余信息,并作为相应局部诊断神经网络的输入层.
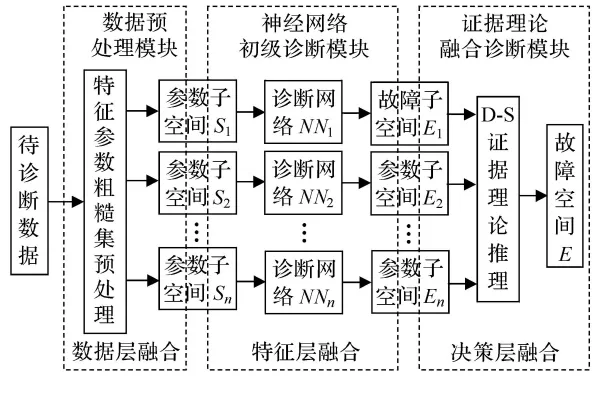
图1 信息融合综合诊断系统结构框图
1.2.1 连续数据的离散化 粗糙集只能处理离散化数据,而原始故障诊断决策系统中的数据往往是连续的.因此,必须先对原始故障诊断决策系统中的数据进行离散化处理.
离散化方法有很多,各种离散化方法具有其自身优势.在实际应用中,通常是根据领域特点,探寻比较合适的算法.本文给出利用SOFM神经网络对连续属性值进行离散化处理的方法[7],离散过程只需要人为指定聚类数目,得到的离散结果能够比较客观地反映数据分布情况.
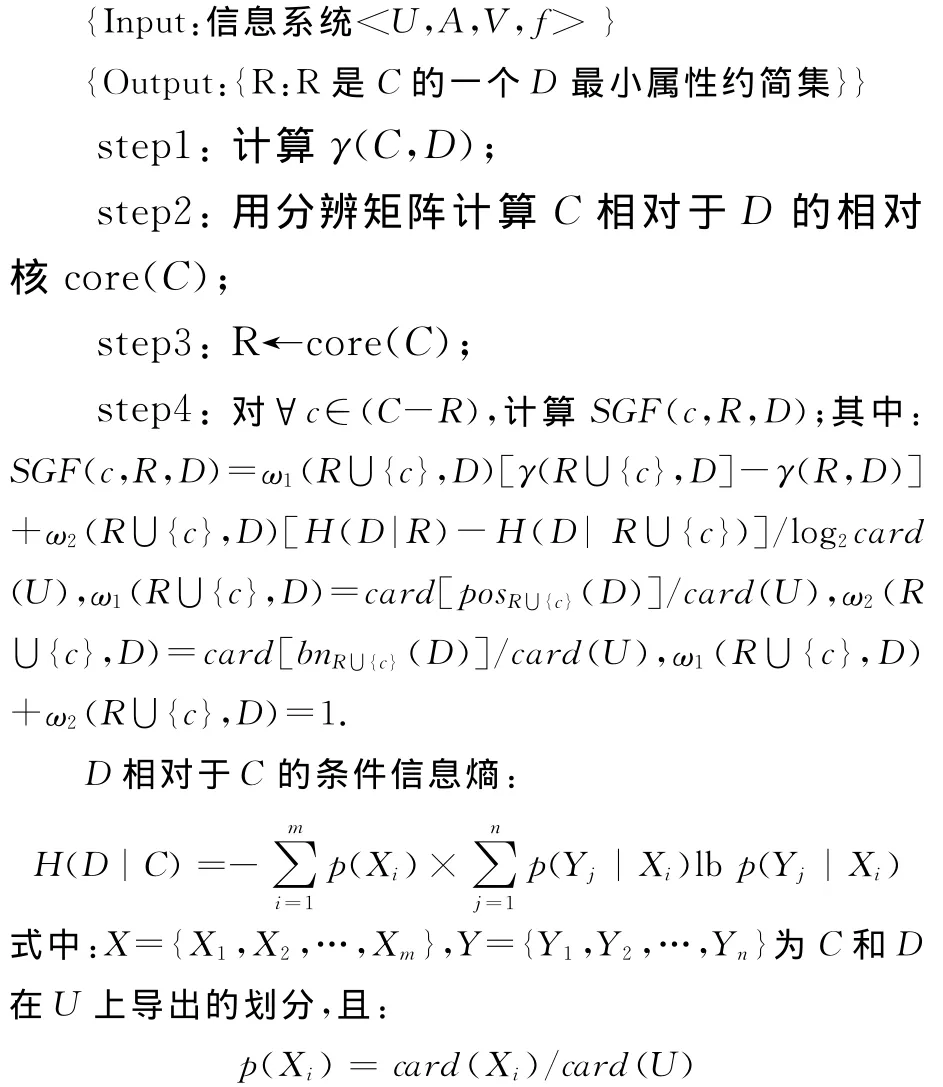
1.2.2 征兆属性约简 故障诊断的特征知识提取中,最重要的步骤是属性约简.通过征兆属性约简,可以剔除决策表中冗余属性,只保留关键部分,且约简后的决策表与约简前具有相同的知识.粗糙集的约简算法目前还没有一个公认的、高效的算法,考虑到约简算法的完备性,下面结合分辨矩阵、属性依赖度和粗糙信息熵给出一个改进的属性重要度的属性约简的启发式算法.

1.3 特征层融合
将通过粗糙集预处理后的特征参数送入神经网络初级诊断模块,用并行神经网络从不同侧面对设备进行诊断,将高维的征兆空间分解成为较低维的征兆空间,减少了网络迭代次数,也可以最大限度地提高了诊断的实时性和准确率.
考虑到RBF网络、概率神经网络都存在“维数灾”现象[8];另,RBF比BP网络需要多得多的隐含层神经元来完成工作,需要很多的训练向量才有较好的效果,因此系统采用3层BP神经网络来实现对单项数据的局部诊断,获得初步局部诊断结果.
BP网络隐含层采用sigmoid函数作为激励函数,输出层采用线性函数。由于BP网络容易陷入局部极小点,且原始训练方法的训练速度也不理想,因此论文给出 Polak-Ribiére(PR)算法和改进梯度法(加动量项α和学习步长η的自适应)交替搜索的改进BP算法[9]。
1.4 决策层融合
该诊断系统通过D-S证据理论融合模块对这些局部诊断结果进行决策层融合,充分利用特征层融合所提取诊断对象的各类特征信息,使故障诊断的结论更加清楚,故障定位更加准确,从而得到综合诊断结果.
基本可信度分配客观化赋值方法及D-S证据理论决策融合诊断推理步骤可详见文献[2],在此不赘述.
2 综合诊断实例
舰船旋转机械装置是舰船上重要的机械设备,其性能影响并制约着舰艇技战术性能的发挥,对其故障诊断技术的要求特别迫切.现就船艇某旋转机械转子不平衡F1、油膜涡动F2、转子径向摩擦F33种典型故障的诊断问题验证所提出的诊断策略的有效性.
2.1 各诊断参数子空间的获取
1)频域段能量值参数子空间的获取 利用故障样本信号频域中不同频段上的能量值作为特征参数,取振动信号中(0~0.39)f,(0.40~0.99)f,1f,2f,3f(f 为旋转频率)5个频段上的能量为故障特征参数(分别用C1,C2,C3,C4,C5表示).选取其中10组原始数据样本构成表1所列的故障原始数据决策表,并作为局部诊断BP神经网络的训练样本,每组样本有5个条件属性和1个决策属性.BP网络采用如下形式表示输出:F1(1,0,0),F2(0,1,0),F3(0,0,1).

表1 故障原始数据决策表
运用SOFM网络连续数据离散化方法对表1进行离散化处理,再运用1.2.2属性约简算法进行属性约简,得到C的一个D最小约简子集为{C2,C3,C4},选取其为最优决策系统,合并相同的决策规则,如表2所列.

表2 最优决策系统
为了检验粗糙集与神经网络融合的性能,本文在表1和表2的基础上,分别设计了相应的具有3层感知器的BP神经网络来进行故障识别,对应的网络结构分别为5-8-3和3-7-3,设网络的目标误差为0.000 1,最大训练步数为2 000,运用文中所提BP网络训练方法对2个网络进行训练.分别经过685和320次迭代达到训练目标要求.分别以原来的5个条件属性C1~C5和约简后的3个条件属性C2~C4作为输入层神经元,F1,F2,F33种典型故障作为网络的输出,用神经网络进行故障识别,神经网络的实际输出结果全部正确且完全一致.2个网络模型的基本参数比较见表3.

表3 神经网络模型的比较
由表3可见,约简后的网络结构更为简单,其训练时间更短,精度更高,这充分表明了基于粗糙集约简处理的神经网络简化了网络结构,显著提高了网络学习效率和诊断精度.为基于D-S证据理论的决策级综合诊断提供了更为准确的特征级的诊断结果.
2)频域幅值参数子空间的获取 利用故障样本信号频域中不同频段上的幅值分量作为特征参数,取振动信号中频域特征频谱中(0.01~0.39)f,(0.40~0.59)f,(0.60~0.99)f,1f,2f,3f,4f,>4f(f为旋转频率)8个不同频段上的幅值分量作为故障特征参数(分别用C1~C8表示).仿照频域段能量值参数子空间的获取方法得到C的一个D 最小属性约简集为{C1,C2,C4,C5},设计相应的3层BP神经网络的结构为4-6-3,运用原始数据对网络进行训练,达到训练要求后,子网络2训练完毕。
3)敏感参数参数子空间的获取 敏感参数对旋转机械的故障诊断起着重要作用,本文取反映旋转机械运行状态的6种敏感参数(临界转速、转速、负荷、油温、流量和压力)作为故障特征参数(分别用C1~C6表示).仿照前述方法得到C的一个D 最小属性约简集为{C2,C3,C4},设计相应的3层BP神经网络的结构为3-5-3,运用原始数据对网络进行训练,达到训练要求后,子网络3训练完毕。
2.2 神经网络特征层融合诊断
从3类故障的剩余样本中各任选20组样本对各网络进行测试.测试结果如表4所列.

表4 网络测试结果 %
下面以一个样本S1为例进行多征兆域融合诊断研究,把S1的频率断能量、频域幅值和敏感参数特征值分别经过粗糙集数据层预处理后分别作为训练好的3个子诊断网络的输入,获得各神经网络的输出,即神经网络初级诊断结果,如表5所列.
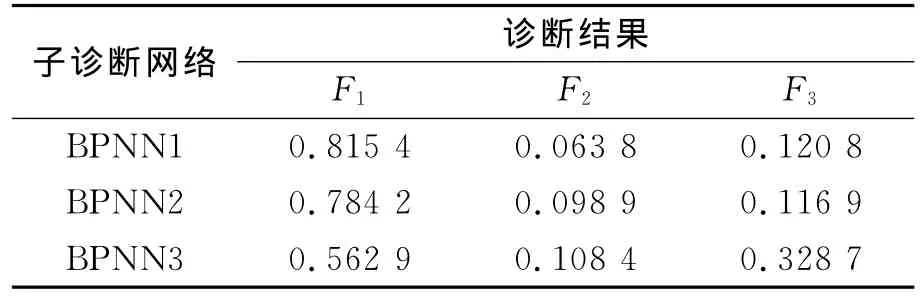
表5 神经网络初步诊断结果
2.3 D-S证据理论决策层融合诊断
3个子网络构成识别框架的3个证据体,构造决策推理层基本可信度分配如表6所列,于是得到3个证据体单独作用的信度区间如表7所列,再利用D-S证据组合规则进行决策级融合得到各证据体融合作用的信度区间如表8所列.
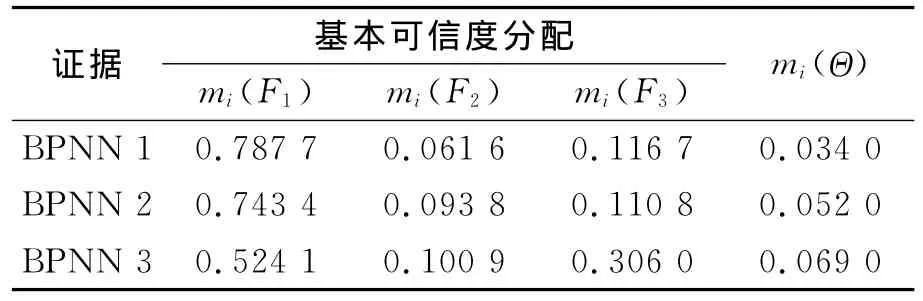
表6 各证据体基本可信度分配

表7 各证据体单独作用的信度区间

表8 各证据体融合作用的信度区间
由诊断决策规则,根据实际诊断情况和专家经验,同时考虑能有效区分故障类型,本文经大量调试后取ε1=ε2=0.60,γ=0.10,从表7可以看出单纯依靠BPNN3不能对S1所反映的状态进行识别;若使用3个证据的两两或三者相互融合,由表8可知所有的融合方式均能识别故障状态即F1(转子不平衡),而该试验样本正是在转子不平衡故障状态下测得的,显然与实际诊断结果完全一致.
由表7,8可知,仅利用单一证据对故障进行诊断识别时,可信度比较低,不确定性比较高,难以准确得出诊断结论;随着证据的增多,在证据融合作用下,诊断结论的信度值Bel(F1)明显增大,置信区间范围和证据的不确定性mi(Θ)明显减小,融合后的置信区间较融合前各证据体单独作用的置信区间具有更好的峰值性和可分性,有利于更准确地进行故障的分类识别,表明诊断的精度和可靠性随之明显提高.
3 结束语
提出了将粗糙集、神经网络、证据理论3种方法融合推理的综合故障诊断方法.该方法用粗糙集理论对原始征兆数据进行预处理,进行数据层融合,约简冗余信息,提取关键特征;再运用并行神经网络对粗糙集融合处理后的特征数据进行特征层融合,可有效的简化各个神经网络结构,缩短网络训练时间,获得网络的局部诊断结果;最后运用D-S证据理论对各局部诊断结果进行决策层融合,得到综合诊断结果.
综合诊断实例证明,本文提出的三级融合推理的综合故障诊断方法,可以有效地进行故障的诊断推理,能显著提高故障诊断的准确性和可靠性,为故障的准确诊断或维修策略的制定都具有重大现实意义.
[1]张 冀,王兵树,邸 剑,等.传感器多故障诊断的信息融合方法研究[J].中国电机工程学报,2007,27(16):104-108.
[2]杨 广,吴晓平.神经网络与D-S证据理论分层融合的柴油机综合故障诊断方法研究[J].武汉理工大学学报:交通科学与工程版,2011,35(3):558-561.
[3]贺建军,赵 蕊.基于信息融合技术的大型水轮发电机故障诊断[J].中南大学学报:自然科学版,2007,38(2):333-338.
[4]DEMPESTER A P.Upper and lower probabilities induced by a multi-valued mapping[J].Annals Mathematical Statistics,1967,38:325-339.
[5]SHAFER G.A mathematical theory of evidence[M].Princeton:Princeton University Press,1976:133-185.
[6]戴冠中,潘 泉,张山鹰,等.证据推理的进展及存在的问题[J].控制理论与应用,1999,16(4):465-469.
[7]杨 广,吴晓平.舰船装备故障诊断特征知识获取方法研究[J].船舶工程,2009,31(1):51-55.
[8]李冬辉,周巍巍.基于多分辨率小波网络-BP神经网络-D-S证据理论信息融合模型的直流系统故障诊断方法[J].电网技术,2004,28(24):16-20.
[9]YANG Guang,WU Xiaoping,ZHANG Qi,et al.Fault diagnosis of ship main power system based on multi-layer fuzzy neural network[C]//Proceeding of the 6th WCICA,©2006IEEE ,2006,7(12):5713-5717.
猜你喜欢
一重技术(2021年5期)2022-01-18
四川师范大学学报(自然科学版)(2021年6期)2021-11-15
科教导刊·电子版(2021年6期)2021-05-06
成都信息工程大学学报(2019年2期)2019-08-28
电子制作(2018年10期)2018-08-04
自动化学报(2018年2期)2018-04-12
智能系统学报(2017年3期)2017-08-01
厦门理工学院学报(2016年3期)2016-11-10
广东石油化工学院学报(2016年3期)2016-05-17
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
