
北斗与GPS组合伪距单点定位精度分析
2013-04-27 07:27陆亚峰楼立志马绪瀛蒋海林
全球定位系统 2013年6期
陆亚峰,楼立志,马绪瀛,蒋海林
(1.同济大学测绘与地理信息学院,上海200092;2.61175部队,江苏 南京210049)
0 引 言
北斗卫星导航系统是我国自行研制的全球卫星定位系统,是继美国全球定位系统(GPS)和俄罗斯GLONASS之后第三个成熟的卫星导航系统。截止到2012年底,北斗卫星导航系统在轨工作卫星有5颗地球静止轨道(GEO)卫星、4颗中地球轨道(MEO)卫星和5颗倾斜地球同步轨道(IGSO)卫星。该系统已具备覆盖亚太地区的导航定位服务能力[1]。
随着北斗卫星导航定位系统建设进程的推进,国内外的学者从卫星钟差,对流层,多路径等相关误差开展研究,分析并改正了相关误差后,评估了北斗定位的精度[2]。同时,近年来北斗在轨卫星数量逐渐增多,组合系统较之单系统在定位的准确性、可靠性、可用性等方面有明显的优势,不同系统观测卫星的组合导航将成为研究的一个方向[3]。本文主要介绍了北斗/GPS系统组合单点定位的原理和模型,并通过同济大学TJA站数据的处理和分析,比较GPS伪距、北斗伪距、北斗/GPS组合伪距单点定位的精度。
1 北斗/GPS组合伪距单点定位
1.1 时间基准与坐标基准的统一[4]
北斗卫星导航系统采用北斗时间系统(BDT),起点为2006年1月1日的UTC零点,溯源于协调世界时UTC,与UTC之间存在跳秒改正差,与UTC的偏差保持在1μ以内,GPST时原点为1980年1月1日0时的UTC,BDT-UTC≈(TAI-UTC)-32s.北斗卫星导航系统还处于建设阶段,建成的系统也将提供与GPS、GALILEO等系统的时间偏差,方便兼容用户定位。本文在进行北斗与GPS组合定位时,统一时间基准到GPST.
北斗卫星导航系统采用2000中国大地坐标系(CGCS2000),GPS采用WGS-84坐标系,它们都是依靠IERS定义的ITRS坐标框架。WGS-84最初的精度约1m,经过两次精化后,精度已达2cm,与ITRF的精度基本一致。CGCS2000由国内GPS连续运行参考站、空间大地网和天文大地网3个层次的站网坐标(和速度)体现,也是地心坐标系,与ITRF的一致性约5cm.因此,WGS-84与CGCS2000坐标系差异在厘米级,对精度要求不高的用户而言(精度低于2cm),不需要进行坐标转换,但对高精度用户,则必须考虑两者的转换关系。
1.2 北斗/GPS组合伪距单点定位数学模型[5-6]
卫星到测站点的距离观测方程为

考虑卫星和接收机钟差的影响

式中:Tk、Tj为接收机和卫星的GPS标准时;tk、tj为接收机钟与卫星钟钟面时,δtk、δtj为接收机与卫星钟钟差。将式(2)代入式(1)可得

式中,C(tk-tj)即为观测伪距ρ′,所以伪距观测方程可表示为

卫星钟差δtj可通过卫星星历直接计算为

此时,将式(4)线性化得:

误差方程为

式中,l=ρ′-Cδtj-;δtk为接收机钟差,如果j号卫星为GPS卫星,则δtk=δtGPS为GPS系统所对应的钟差,如果j号卫星为北斗卫星,则δtk=δtBD为北斗系统所对应的钟差。为j号卫星到测站点的近似距离,由测站点近似坐标(X0,Y0,Z0)及卫星坐标(Xj,Yj,Zj)求得

如果一个历元同时观测5颗卫星的信号,即可由观测方程解算出5个未知参数(δX,δY,δZ,C·δtGPS,C·δtBD).如果超过5颗卫星时,则采用最小二乘平差法求解。假设接收机接收到m颗GPS卫星信号,(G1、G2…Gm),n颗北斗卫星(C1、C2…Cn),此时可建立误差方程为

式中


此时若将各观测视为等权处理,按最小二乘原理可解得

1.3 选权迭代法解算误差方程
为避免北斗与GPS观测信号中粗差的影响,可通过选权迭代法估计参数^x,即在平差过程中随着改正数的变化,经过多次迭代,使含有粗差的奇异观测的权函数趋近于零,以减少粗差观测值的影响。选权迭代法的基本计算程序为
1)列立误差方程,将各观测视为等权处理,即各观测权函数初值均为1,p1(vi)=p2(vi)=…pn(vi)=1.
2)解算误差方程,得出x与v的第一次估值为

3)由V1确定各观测权函数pi(vi),再解算误差方程,类似迭代计算,直至两次解算的差值符合限差要求为止。
常用的权函数确定方法有Huber法、一次范数最小法、p范数最小法、丹麦法、Hampel法等,采用的方法为Huber法。取c=2σ,则其权函数通过下式表达

1.4 精度评定
由改正数V及误差传播定律,可得单位权中误差及观测值精度为


显然,精度因子DOP值越大,定位精度越低,也常称之为精度衰减因子。此外,在考虑空间直角坐标投影到高斯坐标时,还可用各个方向的精度因子来表征定位精度,可以表示为

进行单点定位时,各观测历元所能观测到的卫星个数及卫星编号不断变化,卫地距的方向也随时发生变化,因此代码A阵以及(ATA)-1阵也会随历元而变。而单点定位常用的方法包括单历元解几何平均、整体解、法方程累加求解、单历元解加权平均等。以上方法中,又属单历元加权平均算法较为适用,本文采用此方法计算,该方法不但可以获得与其它解法相同的解算结果,还能获得钟差参数。
2 算例分析
利用MATLAB实现上述算法,采集数据的接收机为和芯星通(UNICORE)公司生产的UB240-CORS北斗/GPS双系统四频接收机(GPS:L1、L2;北斗:B1、B2),该接收机完全能满足CORS基准站接收机精度要求。以同济大学TJA站2013年3月15日24h数据,1s采样率,进行计算分析。伪距单点定位可用星的数目如图1所示,定位结果与Bernese解算结果作差结果如图2所示,同时转换到N、E、U方向结果图3所示。
由图1可以看到,在同济大学TJA站北斗可用卫星数为8~10颗,GPS当天可用卫星数大部分时间集中在6~10颗。而GPS当天最少时只有4颗卫星可用,仅仅只能满足基本定位要求,不存在多余观测值,可见GPS观测数据质量不高。因而在图4中,出现没有中误差的情况。而北斗/GPS组合定位提高了可用卫星的数目,极大地增加了观测值的个数。

图1 伪距单点定位可用星数目

图2 伪距单点定位解算X、Y、Z三个分量时间序列
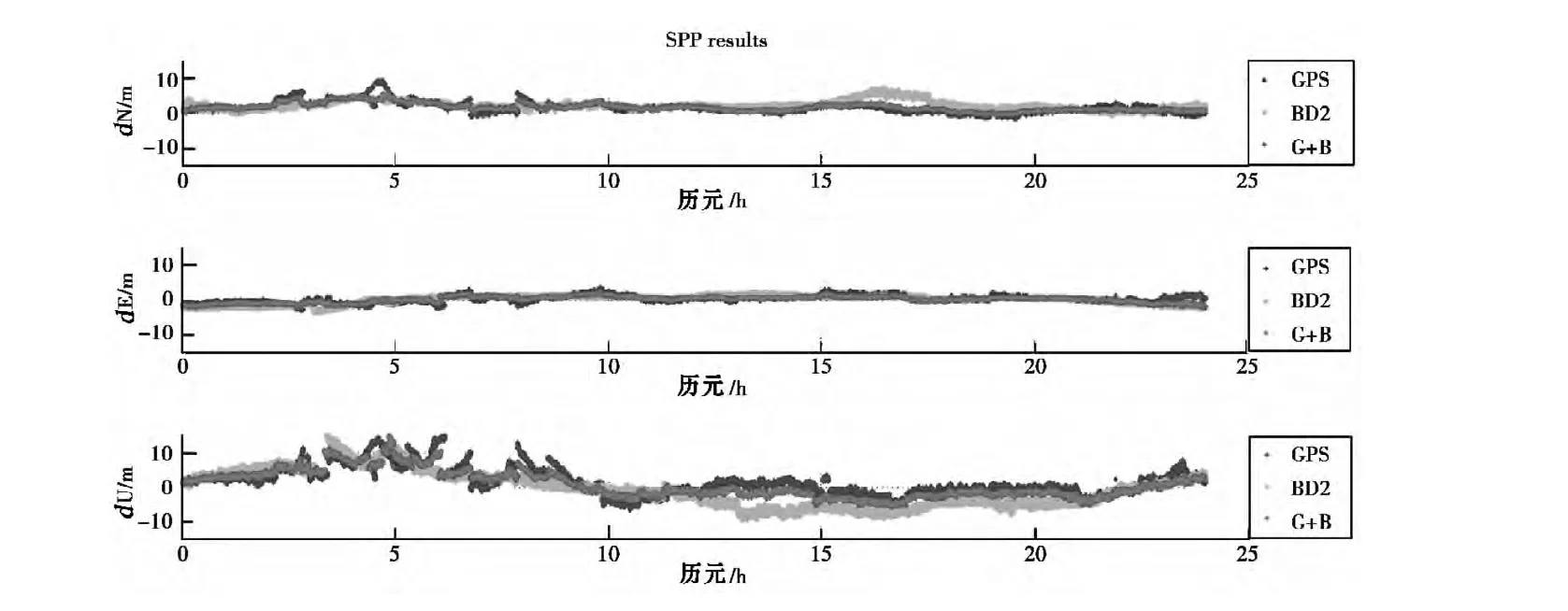
图3 伪距单点定位解算N、E、U三个方向时间序列

表1 伪距单点定位解算结果统计
由图2、图3、表1可以看到,北斗伪距单点定位结果的时间序列N、E、U各方向波动较大,其中E方向结果最好,这是由于北斗特殊的星座构成导致的,5颗在赤道上空的地球同步卫星加强了东西方向的定位精度。北斗伪距单点定位的精度平面方向上达到3m以内,高程方向优于8m,满足普通导航定位的需求。

图4 伪距单点定位中误差
通过比较三种伪距单点定位的精度,可以看出北斗单系统伪距单点定位精度最差,虽然GPS数据质量不是很高,但是GPS单系统伪距单点定位精度仍然优于北斗单系统伪距单点定位精度,而北斗/GPS组合伪距单点定位精度明显优于单系统。尤其在GPS数据质量不高时,组合伪距单点定位可以减少对单一系统的依赖性,而且还可以增强卫星定位的可靠性和可用性。
同时,可以得出现阶段由于北斗系统整体尚不成熟,相比GPS系统还有较大差距,如何优化北斗卫星星座、消除各类误差等等,将成为提高北斗导航应用精度的一大研究方向。

图5 伪距单点定位GDOP、PDOP值变化

图6 伪距单点定位NDOP、EDOP、UDOP值变化

表2 伪距单点定位NDOP、EDOP、UDOP值统计
由图5、图6、表2可以看到,北斗单系统伪距单点定位的精度因子值比GPS单系统伪距单点定位的精度因子值大,所以定位精度也低。而利用当前北斗卫星系统与GPS系统组合观测,在卫星可见性和DOP值方面都比GPS单一系统有改善,尤其是在观测条件较差,截止高度角较大时,改善作用更为明显,组合系统DOP值相比GPS单一系统降低率超过20%.这表明,目前在轨的北斗卫星系统已能运用于GPS导航定位中用以改善观测条件困难情况下导航定位的精度。
由图7可以出看出北斗伪距单点定位与组合定位解算的接收机钟差差值比GPS伪距单点定位与组合定位解算的接收机钟差差值大,波动范围也要大。说明北斗稳定性也不如GPS,相比GPS系统还有较大差距。通过一整天的数据计算,由图4可以看出在凌晨3点-7点时间段定位精度最差,在这个时间段可见星数目,几何精度因子等不存在异常,而在此时间段内钟差误差波动比较大。可以得出卫星钟差、接收机钟差等误差项对伪距单点定位精度也有较大影响,如何消除钟差也是提高北斗定位精度的一个方向。由图8可以看出GPS、北斗组合单点定位解算时各系统的接收机钟差差值比GPS、北斗各自单点定位解算时各系统的接收机钟差差值波动范围小且稳定。进一步表明组合系统要比单系统稳定,可靠。
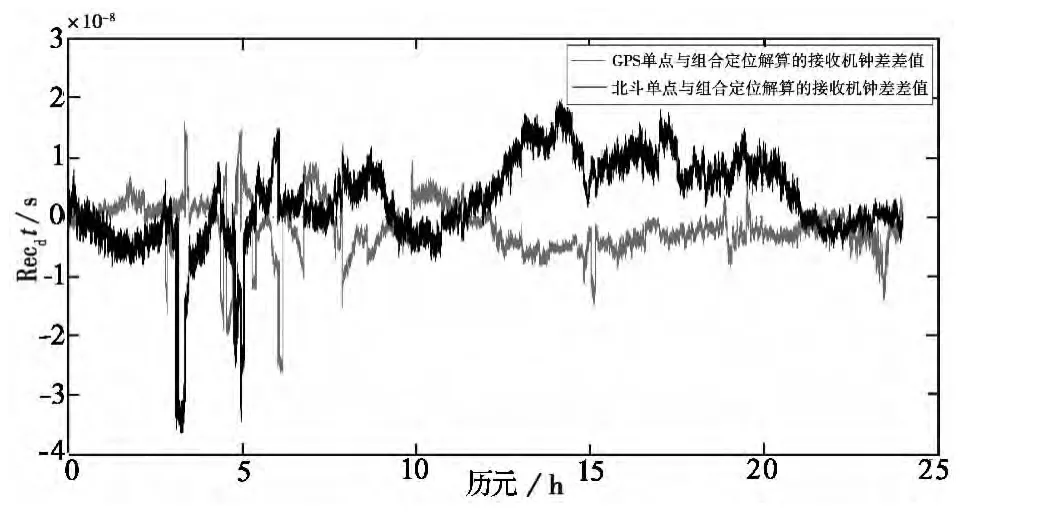
图7 伪距单点定位解算时单系统与组合系统直接的接收机钟差差值

图8 伪距单点定位解算时各系统的接收机钟差差值
3 结 论
主要介绍了GPS与北斗系统组合单点定位时的原理和模型,并通过同济大学TJA站数据的处理和分析。具体结论如下:1)北斗伪距单点定位的精度平面方向上达到3m以内,高程方向优于8 m,满足普通导航定位的需求。2)北斗/GPS组合星座降低了DOP值,提升系统的稳定性和可用性;3)北斗/GPS组合增加了可见卫星数量,对提高用户定位精度非常有利,北斗单系统伪距单点定位精度最差,GPS单系统伪距单点定位精度优于北斗单系统伪距单点定位精度,而北斗/GPS组合伪距单点定位精度明显优于单系统。
本文的结果还是初步试验结果,随着北斗卫星导航定位系统建设的不断推进,北斗的精度会越来越高,而多卫星导航系统的组合导航定位将成为未来发展的趋势。
[1] 中国卫星导航系统管理办公室.北斗卫星导航系统发展报告1.0版[R].北京.2011.
[2] CAO Yueling,HU Xiaogong,WU bin,et al.The wide-area difference system for the regional satellite,[J].Science China(Physics,Mechanics &Astronomy),2012,55(7):1307-1315.
[3] 刘 季,张小红.GPS/BD组合导航定位实验和精度分析[J].测绘信息与工程,2012,37(4):1-4.
[4] 周 巍,郝金明,朱 璇 ,等.COMPASS与GPS兼容定位算法及性能分析[J].测绘科学,2012,37(5):5-8.
[5] 魏子卿,葛茂荣.GPS相对定位的数学模型[M].北京:测绘出版社.1998.
[6] 刘基余.GPS卫星导航定位原理与方法[M].2版.科学出版社,2008.
[7] 刘伟洲,伍吉仓.GPS/北斗组合导航系统卫星可见性和DOP值分析[C]//中国卫星导航学术年会,2012.
[8] 陆亚峰,楼立志,马绪瀛,等.北斗伪距多路径分析及单点定位解算[J].矿山测量,2013(4):18-21.
[9] 范 龙,柴洪洲.北斗二代卫星导航系统定位精度分析方法研究[J].海洋测绘,2009,29(1):25-27.
[10] MA Xuying,SHEN Yunzhong.Multipath analysis of COMPASS triple frequency observations,[C]//The International Symposium on GPS/GNSS 2012,2012.
[11] MA Xuying,SHEN Yunzhong.BeiDou positioning and multipath analysis for short baselines[C]//China Satellite Navigation Conference(CSNC)2013,2013.
猜你喜欢
地理空间信息(2022年10期)2022-10-31
导航定位学报(2022年5期)2022-10-13
汽车实用技术(2022年11期)2022-06-20
矿山测量(2021年2期)2021-05-07
矿山测量(2020年6期)2021-01-07
导航定位学报(2018年3期)2018-09-03
作文与考试·小学高年级版(2017年16期)2017-08-14
载人航天(2016年4期)2016-12-01
山东工业技术(2016年15期)2016-12-01
电子制作(2016年1期)2016-11-07
