一种可选向行星传动轮机构
2013-07-06 03:10秦孝康刘任文李亚军宋广舒
科技视界 2013年8期
秦孝康 刘任文 李亚军 宋广舒 孙 伟
(郑州大学 机械工程学院,河南 郑州 450001)
0 引言
在当今社会,各种从动轮机构遍布我们的生产、生活中,可谓各式各样、琳琅满目。但现今存在的从动轮或者仅从属于主动轮运动如常见的普通车轮等,或者可以限制轮子转动方向实现单向转动如棘轮等。但都存在很大不便,如前者无法在需要限制转动方向时实现单向传动,而后者只能使机构单向传动而限制了机构转动方向的多样性和可选择性。因此,有必要开发一种既能实现两个方向自由转动,又能在需要时实现单方向限制性转动的从动轮机构。
1 从动轮机构概述
1.1 从动轮介绍
主动轮就是提供动力,输出扭矩和功率的轮,从动轮就是不提供动力,不输出功率和扭矩的轮。主动轮对于机动车辆来说十分重要,但是从动轮同样也是不可或缺的,特别对于一些特殊用途的车辆来说,从动轮发挥的作用并不比主动轮差。
1.2 何谓可选向从动轮
可选向从动轮区别于普通从动轮之处在于:它可以根据需要选择从动轮可以实现的转向,如①只允许顺时针转动、②只允许逆时针转动、③根据实际情况临时允许顺时针或逆时针转动机构等等。如棘轮就是一种只允许向一个方向转动,而不可以相反方向的机构。
2 可选向行星传动轮机构的初步设计
2.1 设计目的
本文要解决的技术问题是提供一种既能实现两个方向自由转动,又能在需要时实现单方向限制性转动的从动轮机构。
2.2 技术方案
为解决上述技术问题,本文所采取的技术方案是:一种可选向行星传动轮机构,其特征在于:包括两个相对设置的三脚架、三个轮系机构、链轮链条机构和驱动机构;三个轮系机构分别安装在两个三脚架的三个支脚上;每个轮系机构都由主链轮轴、主链轮、空心丝杆、螺母、摩擦片、棘轮和橡胶轮组成;其中,主链轮轴通过轴承安装在两个三脚架的支脚上;从第一三脚架到第二三脚架之间,空心丝杆、主链轮、螺母、摩擦片和棘轮依次套装在主链轮轴上,并且空心丝杆固定在第一三脚架的支脚上,主链轮与螺母固定后旋接在空心丝杆上,棘轮与主链轮轴固定连接;橡胶轮套在主链轮轴上,并且橡胶轮安装在棘轮上;链轮链条机构包括驱动链轮和链条;驱动链轮设在第一三脚架的中心位置上;驱动链轮与三个主链轮之间通过链条连接;驱动机构包括设在第二三脚架上的减速电机;所述驱动链轮安装在减速电机的轴上。
2.3 方案优势
采用上述技术方案所产生的有益效果在于:本设计方案的主要功能在于从动于主动轮的运动,提供支撑,保持机构运行的正常进行;同时,该从动轮还可以有效影响主动轮的运动,包括在一定的条件和需要下有选择的实现减速、制动等功能。本设计方案很好的解决了同一从动轮机构既能实现两个方向自由转动,又能在需要时实现单方向限制性转动的问题,且该机构实现简单,成本低廉,切实面向市场需要。
3 附图说明
图1是本设计方案的结构示意图;
图2是本设计方案的轮系机构的放大图;
图3是本设计方案的空心丝杆的结构示意图;
图4是本设计方案的链轮链条机构的结构示意图;
图5是本设计方案的驱动机构的结构示意图。
图1-图5中,1-第一三脚架,2-第二三脚架,3-主链轮轴,4-主链轮,5-空心丝杆,6-螺母,7-摩擦片,8-棘轮,9-橡胶轮,10-驱动链轮,11-链条,12-辅助链轮,13-电位器,14-调紧链轮,15-联轴器,16-减速电机,17-电机固定套。

图1
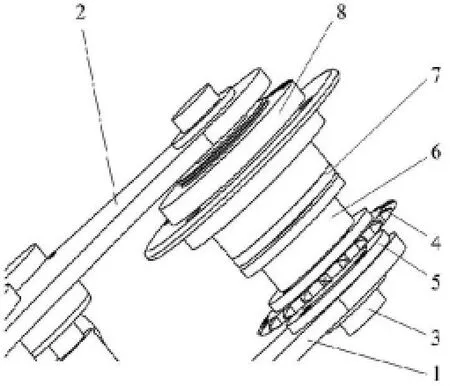
图2
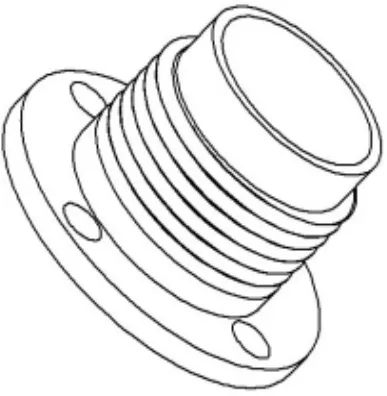
图3

图4
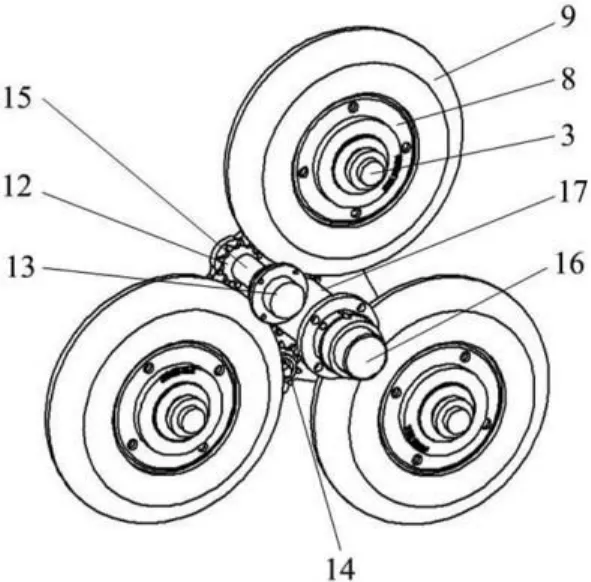
图5
4 具体实施方式
下面结合附图和具体实施方式对本设计方案作进一步详细的说明。
如图1所示为本设计方案的结构示意图。本设计方案包括两个相对设置的三脚架1、2、三个轮系机构、链轮链条机构和驱动机构;三个轮系机构分别安装在两个三脚架1、2的三个支脚上;每个轮系机构都由主链轮轴3、主链轮4、空心丝杆5、螺母6、摩擦片7、棘轮8和橡胶轮9组成;如图2所示为本设计方案的轮系机构的放大图,图2中,主链轮轴3通过轴承安装在两个三脚架1、2的支脚上;从第一三脚架1到第二三脚架2之间,空心丝杆5、主链轮4、螺母6、摩擦片7和棘轮8依次套装在主链轮轴 3上,并且空心丝杆5固定在第一三脚架1的支脚上,如图3所示为本设计方案的空心丝杆5的结构示意图,空心丝杆5的一端带有法兰,空心丝杆5与第一三脚架1之间为法兰连接;主链轮4与螺母6固定后旋接在空心丝杆5上,棘轮8与主链轮轴3固定连接;橡胶轮9套在主链轮轴3上,并且橡胶轮9安装在棘轮8上。
螺母6与主链轮轴3无直接接触,这样,当主链轮4转动时,由于与其相连的螺母6和与第一三脚架1连接的空心丝杆5之间的螺旋作用,将主链轮4的旋转运动转化为直线运动,使得主链轮4与螺母6一同沿轴向远离或接近第一三脚架1运动;棘轮8与主链轮轴3固定连接,橡胶轮9安装在棘轮8上,当棘轮8固定不转动时,橡胶轮9只能按照一个方向转动;螺母6与棘轮8之间安装有一摩擦片7,由于螺母6的轴向移动,将使其与棘轮8接触或分离,这样,当螺母6将摩擦片7与棘轮8逐渐压紧的过程中,摩擦力也逐渐增大,当摩擦力足够大时,棘轮8与主链轮轴3将不能再转动,此时,橡胶轮9将只能沿一个方向转动,从而实现橡胶轮9从能够两个方向自由转动到只能沿一个方向转动的转变。
如图4、5所示分别为本设计方案的链轮链条机构和驱动机构的结构示意图。链轮链条机构包括驱动链轮10、链条11、辅助链轮12、电位器13和调紧链轮14;驱动机构包括设在第二三脚架2上的减速电机16,减速电机16的外部设有电机固定套17。驱动链轮10设在第一三脚架1的中心位置上,并且驱动链轮10安装在减速电机16的轴上;辅助链轮12设在第一三脚架1上,且位于两个主链轮4之间;辅助链轮12通过联轴器15与电位器13连接,电位器13设在第二三脚架2上;调紧链轮14设在第一三脚架1上,驱动链轮10、三个主链轮4、辅助链轮12和调紧链轮14通过链条11连接,链条11的绕行方向如图4中所示。
5 小结
本设计方案很好的解决了同一从动轮机构既能实现两个方向自由转动,又能在需要时实现单方向限制性转动的问题,且该机构实现简单,成本低廉,切实面向市场需要。
[1]陈璟.齿轮连杆机构的分析与综合[D].福州大学,2004.
[2]钮志红.机构运动误差分析方法及其运用[J].现代机械,1995(01).
[3]张星.差动轮系在自调匀整系统中的应用与分析[J].西北纺织工学院学报,1998(04).
[4]李昌熙,乔石,主编.矿山机械液压传动[M].煤炭工业出版社,1985.
[5]杨国欣,刘乃庆,孙裕晶.链传动多边形效应分析[J].农业与技术,1996(03).
猜你喜欢
东北大学学报(自然科学版)(2021年1期)2021-01-15
装备机械(2020年3期)2020-09-29
机械管理开发(2020年1期)2020-03-14
中学生数理化·高二版(2017年2期)2017-04-19
中学化学(2016年12期)2017-02-05
机械研究与应用(2015年3期)2015-08-21
电气化铁道(2015年2期)2015-06-29
郑州大学学报(理学版)(2012年4期)2012-03-25
中学理科·综合版(2008年7期)2008-08-12
中国青年(1981年7期)1981-08-20