
附件驱动系统固有频率灵敏度的计算分析*
2013-08-19 02:45王红云赵季勇上官文斌
华南理工大学学报(自然科学版) 2013年5期
王红云 赵季勇 上官文斌
(1.华南理工大学 机械与汽车工程学院,广东 广州 510640;2.山东美晨科技股份有限公司,山东 诸城 262200)
单根多楔带驱动发动机前端附件是现代汽车广泛采用的附件驱动形式之一.这种附件驱动系统具有结构简单、传动平稳、维护方便、布置紧凑等优点.
国外学者对附件驱动系统动态特性进行了大量的研究工作,内容涉及系统的建模方法、模型的求解方法、设计参数对系统动态特性影响等研究领域[1-10].通过灵敏度分析揭示设计参数对固有频率的影响对附件驱动系统的优化设计具有重要指导意义,然而这方面的研究工作目前开展得还较少.Parker[11]将带模拟为弦线,建立了附件驱动系统弦线耦合数学模型,并利用波动法推导了n 带轮附件驱动系统固有频率对参数(带纵向刚度、张紧器刚度、带线密度、带速等)的灵敏度近似分析式.劳耀新等[12]将三带轮附件驱动系统分解为两个子系统(第1 子系统只包含远离张紧器的带段,其余为第2 子系统),在第2 子系统的基于多项式形式的耦合振动方程基础上推导出了固有频率灵敏度控制方程.并以系统基频最小为目标,对张紧器参数进行了优化设计.文献[12]中采用附件驱动系统弦线耦合模型求解系统固有频率(包括旋转振动占优的固有频率和横向振动占优的固有频率),过程较为复杂.在附件驱动系统中横向振动占优的固有频率一般高于旋转振动占优的固有频率[3].因而在控制系统低阶固有频率的设计原则下[13],对固有频率进行调控时,可采用附件驱动系统旋转振动模型.
文中以七轮附件驱动系统为研究对象,对组成系统旋转振动模型的非线性方程给出了线性化处理方法;在考虑系统带阻尼情况下,利用复模态分析法,求解了系统固有频率;推导出系统固有频率对设计参数的灵敏度分析方程.以一个七轮附件驱动系统为实例,对比分析了模型线性化处理前后的计算结果;研究了系统一阶固有频率对张紧器设计参数(张紧器刚度、张紧臂安装角、张紧臂长)变化的敏感程度;在此基础上,通过改变张紧器设计参数,达到降低附件驱动系统一阶固有频率的目的.文中提出的固有频率对设计参数灵敏度的分析计算方法,为附件驱动系统结构动力学修改提供了依据,是附件驱动系统优化设计的有效途径.
1 附件驱动系统模型
图1 为一个七轮附件驱动系统的结构示意图,包括多楔带、主动轮(轮1)、6 个从动轮和张紧器.主动轮顺时针方向旋转,主动轮的松边为带1,其余轮和带以顺时针方向依次标注.张紧器由张紧臂、张紧轮(轮2)、扭转弹簧等组成,被安装在主动轮松边带侧.
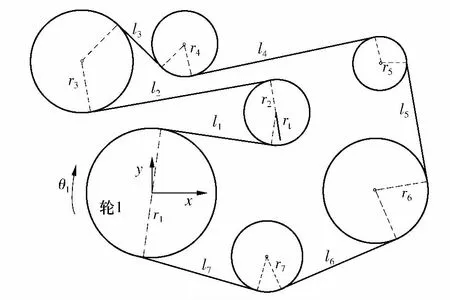
图1 附件驱动系统结构示意图Fig.1 Schematic diagram of accessory drive system
图1 中,θ1为轮1 转角,ri(i =1,2,…,7)为轮i半径,li为带段i 长度,rt为张紧臂长.
建立附件驱动系统旋转振动模型时假设:带的物理特性一致,并以准静态方式伸缩;除张紧轮外,其余各轮和张紧臂都作定轴转动;带在轮上不发生弹性滑动和滑移;主动轮的运动已知,各从动轮上作用的负荷扭矩已知,带以线性轴向刚度和等效线性阻尼模拟;张紧臂旋转轴处弹簧和阻尼元件以线性扭转刚度和线性阻尼模拟.建立七轮附件驱动系统旋转振动模型时不考虑带和轮的楔形、各轮旋转轴处阻尼和系统全部摩擦、带的弯曲刚度、带的横向振动.
设张紧臂转角θt和从动轮转角θj(j =2,3,…,7)为附件驱动系统建模的广义坐标.根据动量矩定理,建立附件驱动系统各从动轮和张紧臂旋转运动的非线性方程(具体建模过程参见文献[14]).
以下以七轮附件驱动系统为研究对象,给出其非线性模型的线性化处理方法.
首先以主动轮转角θ1为参考参数,引入新的变量φj,并设

把式(1)代入附件驱动系统原非线性方程中,得到原变量θt和新变量φj(为叙述方便,以下统称新变量)下各从动轮和张紧臂的旋转运动非线性方程.
然后以附件驱动系统的稳态(已知状态)为参考状态,把系统新的变量分解为两部分:稳态部分和波动部分.则有

式中:上角标‘*’表示参数的稳态部分,上角标‘'’表示参数的波动部分.
把式(2)代入附件驱动系统新坐标下非线性方程中,整理后得到附件驱动系统各从动轮和张紧臂的旋转运动线性方程,其自由振动方程的矩阵表达式为

式中:上标‘·’、‘··’分别表示参数对时间t 的一阶、二阶导数;Φ 为角位移向量,Φ=(θ't,φ'2,…,φ'7)T;M、C、K 分别为附件驱动系统质量、阻尼和刚度矩阵,


式中:Ji、Jt分别为带轮i 的转动惯量和张紧器的转动惯量;m、v 分别为带密度和带轴向运动速度;ki、ci分别为带段i 刚度和阻尼,ki=EA/li、ci=ηki,其中E、A 分别为带段弹性模量和横截面积,η 为带阻尼系数;kt、ct分别为张紧器刚度和阻尼;kpi为与带轮i接触的带的刚度,kpi=EA/(riφi),其中φi为带轮i包角;Ti为带段i 中的张力;角度ζ1、ζ2、β1、β2(参见图2)随张紧臂转角改变而变化.
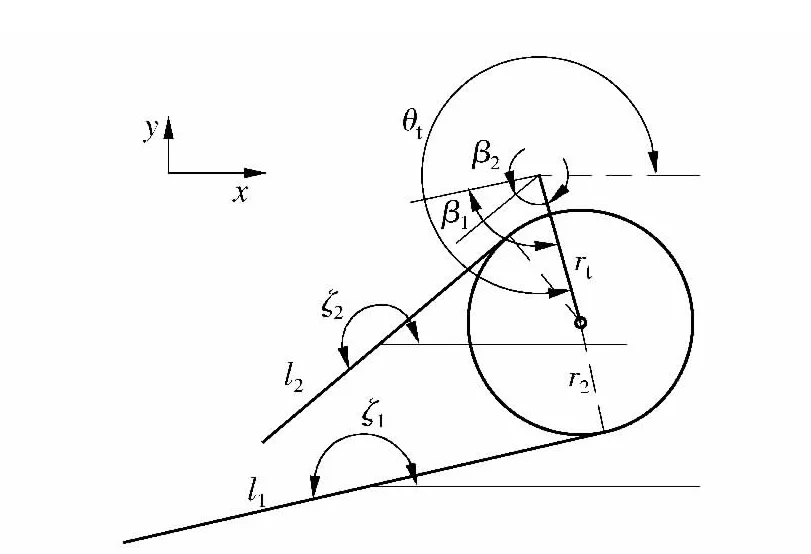
图2 张紧臂与相邻带段位置关系示意图Fig.2 Schematic diagram of position relation between tensioner arm and belt spans adjacent to tensioner
2 附件驱动系统固有频率灵敏度分析式
式(3)有7 对复共轭特征值q(q =1,2,…,14),及与特征值 q 对应的左、右特征向量vq、uq.把由全部特征值组成的特征值矩阵记为 =diag[q]14×14,全部左特征向量组成的左模态矩阵记为 =[v1v2… v14]7×14,全部右特征向量组成的右模态矩阵记为ω=[u1u2… u14]7×14.设

则有

式中:Vq、Uq分别为组成矩阵V、U 的第q 列向量,
设p 为附件驱动系统设计参数,把方程(17)的两边分别对设计参数p 求导,整理有

式中:εq=[2qM +C]uq.式(18)即为附件驱动系统特征值 q对设计参数p 的灵敏度分析式.由文献[15]有:灵敏度的绝对值越大,表明系统固有频率对参数的变化越敏感.
在附件驱动系统中,张紧器无须驱动附件,安装位置相对灵活,设计参数便于修正,常被用来作为调节系统动力特性的对象,如文献[12].在不改变附件驱动系统整体布局、附件带轮设计参数的基础上,通过调整张紧器的设计参数来改变系统固有频率,进而控制共振发生,即能节省设计时间,又能达到设计目的.
3 算例
附件驱动系统设计原则之一是避开有害共振,即要对附件驱动系统的固有频率进行控制,尤其是低阶固有频率[13].利用以上结论对一个七轮附件驱动系统进行固有频率灵敏度仿真分析,研究一阶固有频率对张紧器设计参数(张紧器安装角、张紧器刚度和张紧臂长)变化的灵敏度,进而对张紧器参数进行重新设计,达到降低系统一阶固有频率的目的.
3.1 系统参数
仿真的七轮附件驱动系统参数取值参考文献[3],具体数值见表1、2.其中(xi,yi)为带轮i 的旋转中心坐标;(xt,yt)为张紧臂旋转中心坐标;Qt为张紧器预载荷;θt0为张紧器安装角;μ 为带与带轮间的摩擦因子;当带楔与带轮接触时,μ =1.2,当带背与带轮接触时,μ=0.5[3].

表1 附件驱动系统带和张紧器参数Table 1 Parameters of belt and tensioner for accessory drive system

表2 附件驱动系统轮系参数Table 2 Parameters of pulleys for accessory drive system
3.2 模型线性化前后的计算结果对比
利用MATLAB 软件提供的求解常微分方程初值问题的函数,对建立的仿真附件驱动系统模型进行计算.图3 示出了模型线性化处理前后张紧臂和带轮4 的旋转角度随系统工作时间t 的变化情况,模型线性化处理前后计算结果吻合较好.故利用线性化后的模型对系统动态特性进行分析是可行的.
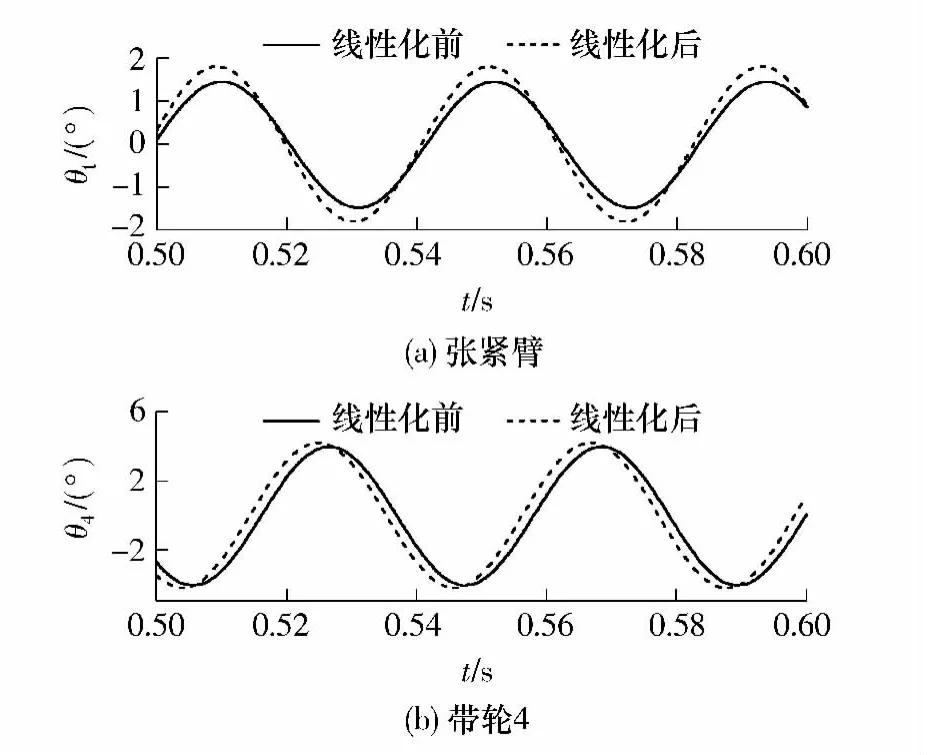
图3 模型线性化前后计算结果对比Fig.3 Comparison of calculated results before and after linearizing for model
3.3 一阶固有频率对张紧器设计参数的灵敏度分析
图4 示出了张紧器设计参数变化对仿真附件驱动系统一阶固有频率fn1的影响(张紧器设计参数取值范围根据实际附件驱动系统特性和仿真附件驱动系统结构来确定).由图4 可见:fn1随rt的增加而减小;当θt0<295°时,fn1随θt0的增加而减小;当θt0≥295°时,fn1随θt0的增加而增加;fn1随kt的增加而增加.由此可知:改变张紧器各设计参数值的大小,附件驱动系统一阶固有频率发生变化.

图4 张紧器设计参数对一阶固有频率的影响Fig.4 Influence of tensioner design parameters on first-order natural frequency
图5 示出了仿真的附件驱动系统一阶固有频率对张紧器设计参数的灵敏度随张紧器设计参数变化的曲线.图中Γrt1、Γkt1、Γθt01分别为fn1对rt、kt、θt0的灵敏度.
由图5 可见:一阶固有频率对rt的灵敏度随rt的增加而减小;当θt0<295°时,一阶固有频率对θt0的灵敏度随θt0增加而减小;当θt0≥295°时,一阶固有频率对θt0的灵敏度随θt0增加而增加;一阶固有频率对kt的灵敏度随kt的增加而减小.

图5 一阶固有频率对张紧器设计参数的灵敏度曲线Fig.5 Sensitivity curves of first-order natural frequencies to tensioner design parameters
3.4 基于固有频率灵敏度分析的张紧器参数设计
在汽车中,对于怠速为700 r/min 的四缸发动机,其对应的频率大约为23.3 Hz,与仿真的附件驱动系统一阶固有频率(19.70 Hz)较接近.为使发动机工作转速尽快越过附件驱动系统的一阶固有频率区域,避免怠速时共振发生,应尽量降低附件驱动系统的一阶固有频率值.
经计算得:仿真附件驱动系统张紧器的3 个设计参数中,一阶固有频率对rt的改变最为敏感(Γrt1=-30.8 Hz/m),对kt的改变最不敏感(Γkt1=1.25 Hz/(N·m/rad));当rt、θt0减小、kt增加时,一阶固有频率增加.因而降低仿真附件驱动系统一阶固有频率的最有效方法为增加rt的值.
表3 示出了改变张紧器3 个设计参数其中之一时,系统一阶固有频率的变化情况.对于仿真的附件驱动系统,尽管在其张紧器设计参数可调节范围内,一阶固有频率的改变量较小,但通过表3 仍然可以得出:当通过修改张紧器设计参数的值来达到改变系统一阶固有频率的目的时,修改一阶固有频率对张紧器设计参数的灵敏度最大的rt的值是最为有效的方法.

表3 张紧器设计参数改变前后系统的一阶固有频率Table 3 First-order natural frequencies before and after changing tensioner parameters
4 结语
文中给出了组成附件驱动系统旋转振动模型的非线性方程的线性化处理方法;推导出了系统固有频率对系统设计参数的灵敏度分析方程;研究了一阶固有频率对张紧器设计参数变化的敏感程度.对一个仿真附件驱动系统的研究结果表明:利用线性化后的模型对系统动态特性进行分析是可行的;当张紧器某一设计参数取不同值时,附件驱动系统一阶固有频率对其变化的敏感度不同;不同的张紧器设计参数的变化对一阶固有频率的影响不同;张紧器3 个设计参数中,一阶固有频率对张紧臂长的变化最为敏感,通过改变张紧臂长来降低一阶固有频率是最为有效的方法.
总之,在附件驱动系统中,张紧器由于安装位置灵活、品种多而常被选作调节系统动力特性的对象.因此通过改变张紧器设计参数来解决附件驱动系统振动问题是目前看来较为理想和有效的方法.这种方法从理论上和技术上来讲都是可行的,但是要真正达到应用水平,还需要做深入细致的研究,其中实验验证将是下一步研究的工作重点.
[1]Kong L,Parker R G.Coupled belt-pulley vibration in serpentine drives with belt bending stiffness[J].Journal of Applied Mechanics,2004,71(1):109-119.
[2]Kong L,Parker R G.Equilibrium and belt-pulley vibration coupling in serpentine belt drives[J].Journal of Applied Mechanics,2003,70(5):739-750.
[3]Hwang S J,Perkins N C,Ulsoy A G,et al.Rotational response and slip prediction of serpentine belt drives systems[J].Journal of Vibration and Acoustics,1994,116(1):71-78.
[4]Zhang L,Zu J W.Modal analysis of serpentine belt drive systems[J].Journal of Sound and Vibration,1999,222(2):259-279.
[5]Zhang L,Zu J W.One-to-one auto-parametric resonance in serpentine belt drive systems[J].Journal of Sound and Vibration,2000,232(4):783-806.
[6]Zhang L,Zu J W.Complex modal analysis of non-selfadjoint hybrid serpentine belt drive systems[J].Journal of Vibration and Acoustics,2001,123(2):150-156.
[7]Leamy M J,Perkins N C.Nonlinear periodic response of engine accessory drives with dry friction tensioners[J].Journal of Vibration and Acoustics,1998,120(4):909-916.
[8]Beikmann R S,Perkins N C,Ulsoy A G.Free vibration of serpentine belt drive systems [J].Journal of Vibration and Acoustics,1996,118(3):406-413.
[9]Beikmann R S,Perkins N C,Ulsoy A G.Nonlinear coupled vibration response of serpentine belt drive systems[J].Journal of Vibration and Acoustics,1996,118(4):567-574.
[10]Beikmann R S,Perkins N C,Ulsoy A G.Design and analysis of automotive serpentine belt drive systems for steady state performance[J].ASME Journal of Mechanical Design,1997,119(2):162-168.
[11]Parker R G.Efficient eigensolution,dynamic response,and eigensensitivity of serpentine belt drives[J].Journal of Sound and Vibration,2004,270(1/2):15-38.
[12]劳耀新,侯之超,吕振华.发动机前端附件带传动系统频率灵敏度分析[J].汽车工程,2006,28(5):477-481,486.Lao Yao-xin,Hou Zhi-chao,Lü Zhen-hua.Frequency sensitivity analysis on belt drive system for front end accessories of engine [J].Automotive Engineering,2006,28(5):477-481,486.
[13]傅志方,华宏星.模态分析理论与应用[M].上海:上海交通大学出版社,2000:242.
[14]王红云,曾祥坤,上官文斌.单根带发动机附件驱动系统模型及其求解[J].机械传动,2010,34 (5):17-21.Wang Hong-yun,Zeng Xiang-kun,Shangguan Wen-bin.The dynamic model and numerical calculation of the serpentine belt accessory drive systems[J].Journal of Mechanical Transmission,2010,34 (5):17-21.
[15]薛冰洋.汽车座椅灵敏度分析及其结构优化的研究[D].吉林:吉林大学机械科学与工程学院,2007:66.
猜你喜欢
客车技术与研究(2022年5期)2022-10-29
中国特种设备安全(2022年5期)2022-08-26
全面腐蚀控制(2021年7期)2021-10-28
装备制造技术(2021年4期)2021-08-05
大电机技术(2021年2期)2021-07-21
中国特种设备安全(2019年8期)2019-10-14
汽车维修技师(2018年2期)2018-07-07
轻兵器(2017年3期)2017-03-13
柴油机设计与制造(2015年4期)2015-11-23
现代机械(2015年1期)2015-01-15
