
单兵腰部助力装置结构设计与运动仿真分析
2013-09-12 07:50陈寿齐焦长君郭兴功
兵器装备工程学报 2013年12期
陈寿齐,焦长君,郭兴功,饶 越
(1.中国人民解放军73911部队,南京 210012;2.南京理工大学机械工程学院,南京 210094)
现代高科技战争对弹药的高消耗,使得火炮装填手在装填炮弹时耗费大量体力。因此,作为一种可以让火炮装填手通过穿戴,从而提供支撑重量,辅助运动等功能效果的机械装置[1-2],单兵腰部助力装置可以避免火炮装填手腰部受到伤害,帮助他们在搬运、装填炮弹时节省体力[3],甚至可以帮助火炮装填手实现自身无法到达的能量。本文在参考了其他机械外骨骼助力系统的结构与控制系统[4-7]的基础上,确定了单兵腰部助力系统的功能规划,完成了初步的结构设计、仿真计算等工作。
1 炮手操作腰背生物力学分析
火炮装填手在弯腰搬运时腰椎的受力情况是本文分析的重点。弯腰搬运时,脊柱好像一根固定在骨盆上的带有枢轴的悬梁,骶骨相当于枢轴,第5腰椎及其与骶骨相连结的椎间盘(Ls/SI)位于悬梁的根部,所承受的压力最大,影响其压力大小的因素主要有搬运炮弹的质量;炮弹到腰椎的距离,即炮弹力臂的长度;火炮装填手上肢质心到腰椎的距离,即人体[8]上肢力臂的长度;整个背部肌肉的拉力。搬运时,脊柱脊椎的力学模型简化为图1所示。
F代表手臂、背肌与腹肌的合力,N代表腰椎的关节反力,G1为人体上身的重量,G2为外负荷的重量之和,α代表腰椎的角度。计算腰椎所受力矩M时忽略F的影响:

本文的仿真对象为体重60 kg的火炮装填手搬运50 kg的炮弹,搬运时炮弹质心到髋关节力臂长度为4 cm。炮手上身质量为30 kg,其质心到髋关节力臂长度为2 cm,由式(1)计算可得腰椎所受力矩为260 N·m。针对火炮装填手,本文所研究的腰部助力装置主要完成以下动作与功能要求:当炮手弯下腰后,准备开始搬运炮弹,腰背与大腿近似角度为α,在搬起炮弹腰部直立的过程中,α角度逐渐减小直至为零。本文规定当火炮装填手处于下蹲的极限状态时,α=100°。在此过程中外骨骼能够提供传动帮助腰部的直立,而且在传动的过程中外骨骼完全配合人体腰部直立的动作和时间。
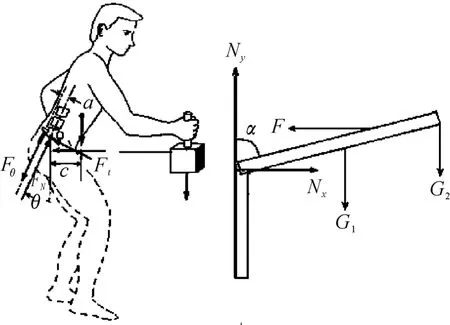
图1 脊柱脊椎力学模型G1
2 腰部助力装置结构设计
在分析现有各种机械外骨骼的特征和用途后,针对本论文所研究的背部助力系统,确定以液压传功[9]为主要传动形式。根据液压缸安装位置的不同,分析设计了以下2种传动方案。
2.1 背部拉动方案
背部拉动方案是将液压缸底端与腿部固定的支架相连,液压缸活塞杆顶端与背架相连,一直使用液压缸直接拉动的方案,以腿部为固定端,通过液压缸直接拉动人体背部,带动人体弯腰后腰背的直立,如图2所示。
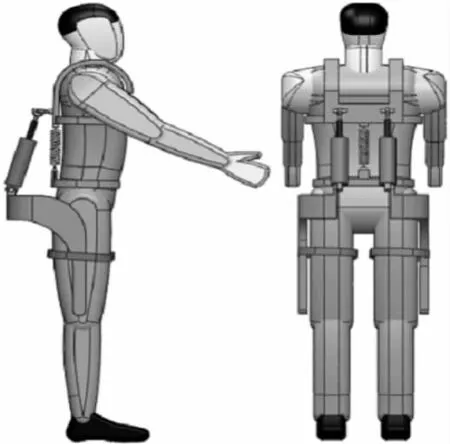
图2 背部拉动方案
在此方案中,关键的几个部件设计如下:
1)腰背支撑装置。如图3所示,在使用腰部支撑装置时,将肩夹固定在人的肩膀上,再通过背带与腰带将整个装置固定在上肢上。为了适合不同身高的人穿戴,腰部助力装置中需要有调节机构,本文采用滑块在槽中的滑动来实现调节长度的功能。其结构设计如图4所示。

图3 腰背支撑装置

图4 腰部调节机构
2)弹簧。根据腰背助力装置的结构要求,炮手操作腰背生物力学,规定弹簧的外径不大于30 mm,弹簧承受的最大工作载荷为300 N,相应的压缩变形量为10~20 mm,最小工作载荷略为10 N。经分析计算,选用60Si2Mn钢丝材质,直径d=4 mm,有效圈数为8.5圈。
3)腿部支撑装置。如图5所示,初步设定绑腿架左右宽135 mm,前后长265 mm,上下长500 mm。人自然站立状态下液压缸长325 mm。

图5 腿部支撑装置
4)联轴器。如图6所示,选用十字轴式单万向联轴器,与背架连接的轴叉大轴叉,半径为22 mm,与液压杆连接的轴叉为小轴叉,半径为20 mm,这样轴叉之间的运动在任意角度下都不会发生干涉。
2.2 髋关节传动方案
髋关节传动方案是将齿轮安装在腿部固定端,齿轮中心与髋关节重合,与液压缸焊接的齿条传动带动齿轮转动,再带动与齿轮焊接的腰背支撑装置,从而帮助人体腰背的直立。
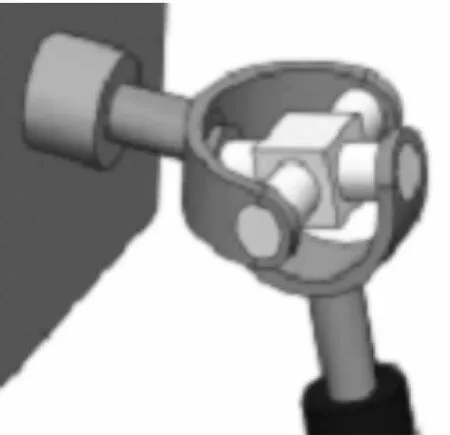
图6 十字轴式万向联轴器
3 腰部助力装置仿真分析
一般人体的搬运主要体现在四肢和腰背上,所以主要仿真分析手臂、躯干、大腿、小腿4个部分之间的受力情况。而且将这四个部分视为刚体并做以下两点假设:不考虑人体肌肉等软组织的受力及运动情况;每一个部位在运动过程中其机械特性都不会发生变化。
3.1 背部拉动方案仿真结果
首先在运动学仿真中使得人体从站立状态运动至要求的下蹲极限状态。在液压杆顶端和液压缸底端各定义一点,在仿真中得出两点之间的距离变化。图7所示为在背部拉动仿真中两点之间的距离变化,即活塞杆的行程变化。

图7 背部拉动方案活塞杆行程变化
可知初始距离为0.5865 m,极限距离为1.1996 m,极限距离超过初始距离的两倍,液压缸满足不了这样的行程变化。故只能减小人体弯腰的角度,此种方案具有一定的局限性。
3.2 髋关节传动方案仿真结果
同背部拉动方案,首先在运动学仿真中测出液压缸中活塞杆的行程变化,如图8所示。
由图8计算可得,活塞杆的最大相对行程:0.4622-0.39=0.0722 m。由运动学仿真分析可知,背部拉动方案同髋关节传动方案相比,通过液压缸拉动背架具有一定的局限性,故只对髋关节传动方案进行动力学仿真。
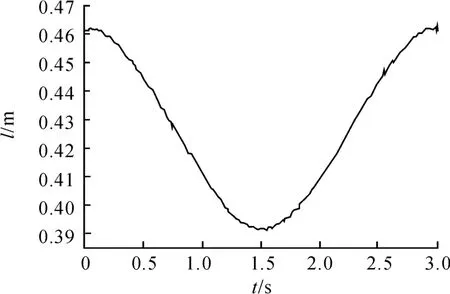
图8 运动学仿真活塞杆行程变化
为了通过动力学仿真得出腰部助力装置对于火炮装填手搬运的效果,本文将人体三维模型置于要求的下蹲极限状态,穿戴腰部助力装置,添加方向垂直向下的500 N的力与手臂上(炮弹的质量),添加方向沿齿条运动方向的1000 N的力。反复修改髋关节处的力矩直至人体完全站立。为了简化仿真,将小腿处于固定状态,如图9所示。
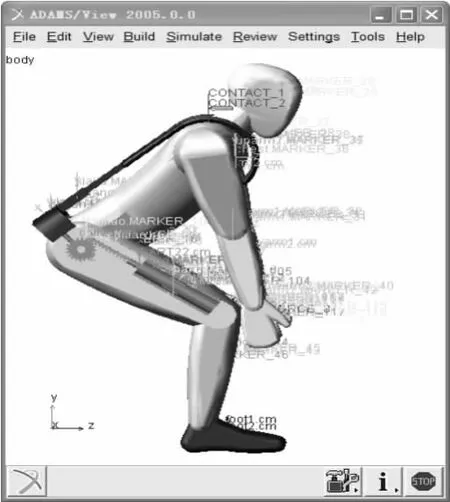
图9 炮手搬运初始姿态
由上文可知在人体没有穿戴背部助力装置时,搬运50 kg的炮弹腰部需要承受260 N·m的弯矩。在仿真中经过反复修改,得出当髋关节力矩为150 N·m时,人体可以完全站立。故可近似认为此火炮装填手在穿戴腰部装置后搬运50Kg时髋关节力矩减小了110 N·m。即可认为节省了42%的体力。此时活塞杆行程变化如图10所示。

图10 动力学仿真活塞杆行程变化
即活塞杆运动行程:0.2578-0.1852=0.0726 m,与髋关节传动方案的运动学结果相符。
4 结论
本文通过对2种单兵腰部助力装置的结构设计和仿真分析可知,背部拉动方案对人体弯腰角度有一定局限性,故采取通过齿轮齿条啮合传动的髋关节传动方案。结合生物力学,将人体搬运时肌肉、关节的受力情况进行简化,在仿真中得出在人体从下蹲极限姿态搬运炮弹到身体直立的过程中,齿条的运动行程为7 cm,当活塞杆推力为1000 N时,可以为火炮装填手搬运50 kg的炮弹时节约42%的体力,仿真数据证实了髋关节传动方案的可行性。
[1]蔡兆云,肖湘江.外骨骼机器人技术研究综述[J].国防科技,2007(12):13-14.
[2]谢涛,徐建峰,张永学.仿人机器人的研究历史、现状及展望[J].机器人,2002,24(4):1-4.
[3]CHU A,KAZEROONI H,ZOSS A.On the biomimetic design of the Berkeley lower extremity exoskeleton[C]//IEEE Internationl Conference on Robotics and Automation,Barcelona,April 2005:849-855.
[4]陈立平.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[5]孙桓,陈作模.机械原理[M].北京:高等教育出版社,2001.
[6]曹恒,牛思捷,王瑜,等.基于ADAMS的助力机械腿结构设计与仿真[J].工程设计学报2009,16(5)340-343.
[7]樊炳辉,曾庆良,车翠莲.基于ADAMS的移动机器人仿真[J].中国制造业信息化,2006,35(5):39-42.
[8]邹静慧,刘树元.人体解剖学[M].北京:科学出版社,2005:34-36.
[9]曾亿山.液压与气压传动[M].合肥:合肥工业大学出版社,2004.
[10]肖鹏,杨前禄,吴飞,等.基于遗传算法的双足机器人性能优化[J].武汉理工大学学报,2011(8):129-132.
猜你喜欢
沈阳理工大学学报(2022年3期)2022-08-11
鞍钢技术(2022年3期)2022-06-12
红蜻蜓·低年级(2022年4期)2022-05-13
中国金属通报(2021年17期)2021-12-23
中南大学学报(自然科学版)(2020年6期)2020-07-16
环球时报(2020-02-21)2020-02-21
作文大王·低年级(2019年2期)2019-01-23
科技创新与品牌(2017年9期)2017-10-20
学苑创造·A版(2016年9期)2016-10-10
专用汽车(2014年1期)2014-12-10
