输入输出个数不等系统的模型跟踪控制
2013-09-20 02:56黄莹陈恩策唐厚君
电气自动化 2013年3期
黄莹,陈恩策,唐厚君
(上海交通大学 电气工程系,上海 200240)
0 引言
模型跟踪控制MFCS(Model Follow Control System)是控制理论的一个重要领域,可以应用到智能转向汽车[1]、发动机燃油控制系统[2]等。但是,由于输入输出个数不相等的系统中,状态空间矩阵不是方阵的限制,导致传统的模型跟踪控制只适用于输入个数等于输出个数的情况。
为此,本文首先分析了传统模型跟踪控制方法的局限性,提出了所遇到的问题,然后针对两个问题一一提出解决方案,最后在以两个系统为例,在MATLAB/Simulink上搭建仿真平台,进行验证。特别对输入个数小于输出个数的系统,在所提的解决方案的基础上,增加了移相器,使得改进后的方法适用于任意输入与输出个数与输出个数不等的系统(满足可控可观和相对阶次的前提条件)。
1 模型跟踪控制
对于状态空间线性系统模型跟踪控制[3],被控对象模型为:

参考模型为:

其中 x(t)∈Rn×1为状态变量,u(t)∈Rm×1为控制输入,y(t)∈Rl×1为控制对象的输出,xm(t)∈Rnm,rm(t)∈Rlm,状态矩阵的维数分别为 A∈Rn×n,B∈Rn×m,C∈Rl×n。
控制率的最终表达式为:

N(s)和Nr(s)由以下式得到:

σi是N(p)各行元素的最高次数,
则知:N(s)∈Rl×m,Nr(s)∈Rl×m
2 遇到的问题
如果输入个数不等于输出个数,即l≠m,则在用式(3)中计算控制率时,会遇到以下两个问题:
(1)由于Nr为l×m的矩阵,不是方阵,不存在逆矩阵;
(2)由于u(t)为m×1矩阵,y(t)为l×1矩阵,不同阶数矩阵不能相加。
此时,控制率计算公式(3)失效。
3 解决方法
3.1 广义逆矩阵的引入
为了解决第一个问题,我们引入广义逆矩阵。
广义逆矩阵是对逆矩阵的拓展,目前,运用比较广泛的是Moore-Penrose广义逆矩阵[4],其中比较简单的求广义逆矩阵的方法是满秩算法:
设A=LR∈Cm×n的秩为r,其中L为列满秩矩阵,R为行满秩矩阵,则:

A+是Penrose广义逆的原始记号,称为“加号逆”。
3.2 输入/输出补零法
为了解决第二个问题,且不改变原方法,我们用补零的方法,将系统变为输入输出个数相等的系统。具体方法如下:假设输入个数大于输出个数,即m>l,则应对输出进行补零,对应的输出矩阵也要补零。

如果输出个数大于输入个数,则用类似的方法进行补零。
4 仿真分析
4.1 多输入-单输出系统
多输入-单输出系统电路图如图1所示。
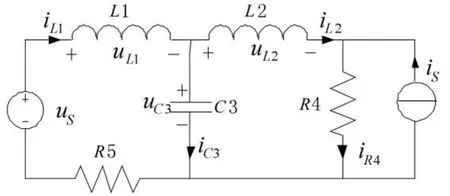
图1 多输入-单输出系统
选电感电流iL1、iL2电容电压uC3作为状态变量,根据基尔霍夫电流定律和电压定律[5],得到:
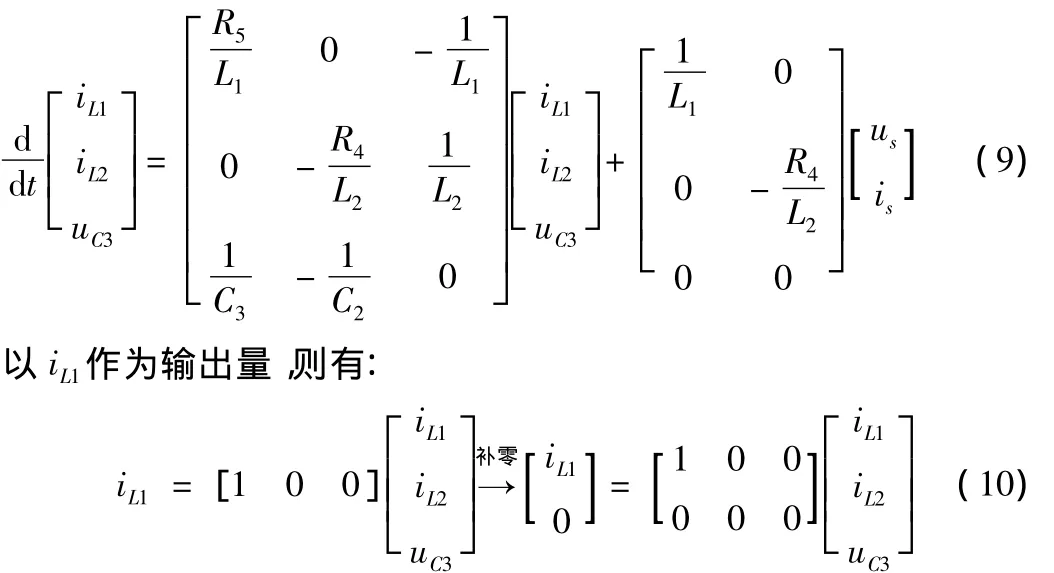
为了计算方便,假设:
L1=L2=1 H,C3=1 F,R4=R5=2 Ω 得:

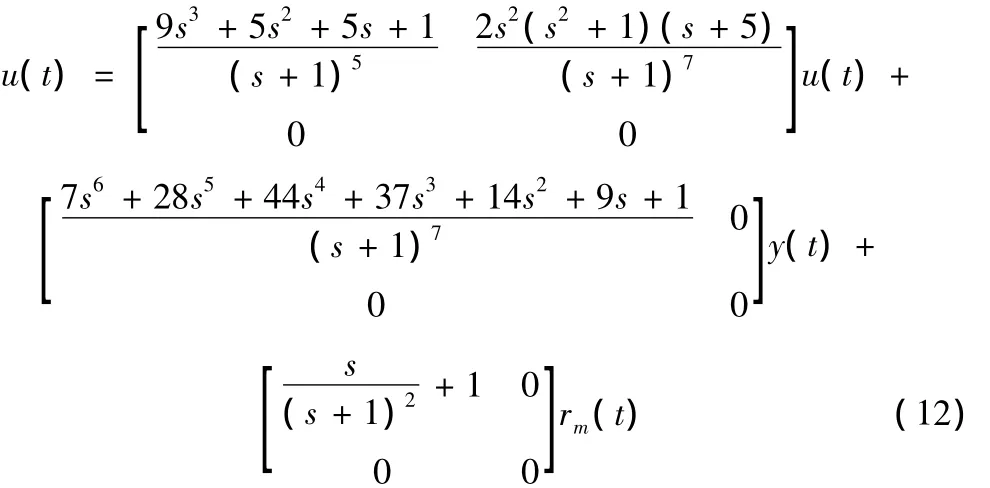
然后即可依照原方法进行模型跟踪控制的设计。得到控制率为:
在MATLAB/Simulink平台上搭建仿真[6],如图2所示。
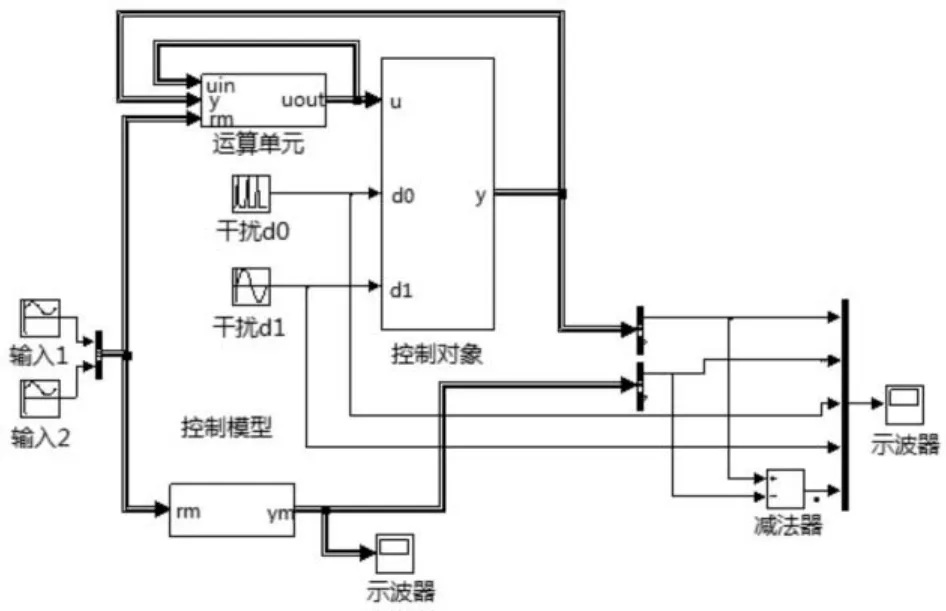
图2 多输入-单输出系统仿真结构
其中,粗线表示多维信号,细线表示单维信号。仿真结果如图3所示。

图3 双输入-单输出系统仿真波形
由于三角波的尖峰处不可导,故在尖峰前后,误差较大,但是在三角波干扰撤去后的第10 s开始,系统误差接近于零,可以非常好的跟踪上参考模型。
4.2 单输入-多输出系统
单输入双输出系统电路图如图4所示。
同样,应用补零的方法,以及广义逆矩阵理论,可以得到系统的控制率。搭建仿真模型,得到波形见图5。
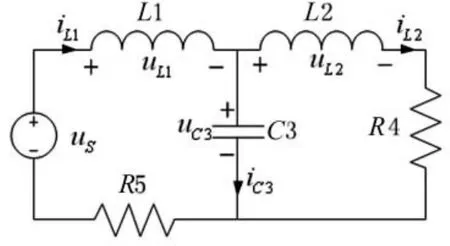
图4 单输入-双输出系统模型
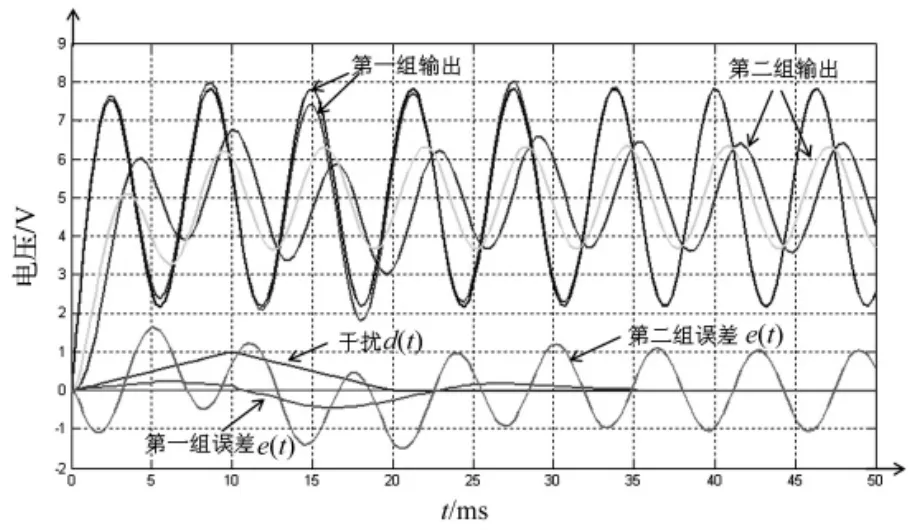
图5 单输入-双输出仿真波形
由图5可以看出,第一组输出可以跟踪上,但是第二组输出只可以跟踪幅值,却总是相差一个相位。其原因是这样的,即使是纯线性系统,当输入个数小于输出个数时,也无法完全跟踪控制,举例来说,两系统如下:

这样,无论如何,都无法实现跟踪。也就是说,只有参考模型和被控对象满足一定比例关系的系统,才能够实现跟踪控制。或者,可以用模型跟踪控制+移相器,完成整个系统准确的跟踪。
5 结束语
根据以上讨论,可知,要对多输入-多输出系统进行模型跟踪控制时,应根据输入输出个数选取不同的方法:
当输入个数等于输出个数时:可以直接运用跟踪控制方法进行运算设计;
当输入个数大于输出个数时:首先对输出进行补零,再对控制率进行计算时,应用Moore-Penrose广义逆矩阵理论求逆;
当输入个数小于输出个数时:运用上述步骤,可以跟踪上与输入个数相等的输出,其他维输出需要设计适当的移位器。
[1]曾长操,刘奋,张建武.智能转向汽车的模型跟踪控制[J].上海交通大学学报,2003,37(11):1763 -1766.
[2]王道波,刘爱萍.采用自适应模型跟踪控制的发动机燃油控制系统含实物仿真[J].南京航空航天大学学报,1998,43(1):29-35.
[3]唐厚君,韩正之,尚宇辉,等.广义线性系统模型跟踪控制的新方法[J].信息控制,2000,29(3):198 -204.
[4]张跃辉.矩阵理论与应用[M].北京:科学出版社,2011:212-215.
[5]刘秉安.基尔霍夫定律及其应用探究[J].科学信息,2009,26(24):537-538.
[6]李传庆,刘广生.基于MATLAB-Simulink的MFA控制模块开发与仿真[J].控制工程,2008,15(S2):61-63.
猜你喜欢
茶叶(2021年1期)2021-04-13
装备制造技术(2019年12期)2019-12-25
铁道通信信号(2019年3期)2019-04-25
校园英语·中旬(2017年10期)2017-11-20
中国医药科学(2017年14期)2017-08-17
吉林省教育学院学报(2017年3期)2017-05-31
中国教育信息化·基础教育(2016年12期)2017-04-15
军事运筹与系统工程(2016年3期)2016-09-26
电脑知识与技术(2016年10期)2016-06-16
西藏科技(2015年6期)2015-09-26