
基于ADAMS的四足机器人运动仿真研究
2013-10-09 03:28王宇翔
河北工业科技 2013年6期
陈 亚,王宇翔,祝 巍
(北京石油化工学院机械工程学院,北京 102617)
目前,多足机器人由于有很强的环境适应性和运动灵活性,已成为机器人研究领域的重要课题[1]。但是多足机器人结构复杂,用传统的机械系统实物试验研究方法设计多足机器人时,不仅周期长,成本大,而且设计过程中计算量巨大,直观性较差,而采用虚拟样机技术能有效地解决多足机器人物理样机制作成本高昂的难点[2-3]。虽然目前多足机器人技术有了很大发展,但制约它进一步实用化发展的一些基础理论问题并没有得到根本解决,采用虚拟样机技术能有效地验证理论研究的正确性,为其运动规划与控制提供新的方法[4]。
本文研究的四足机器人是基于模块化机器人进行搭建的,能有效检验仿真的正确性,并结合实体模型,对四足机器人进行步态规划及逆运动学分析,利用软件MATLAB建立运动学模型,并以机械系统动力学软件ADAMS为平台,建立机器人虚拟样机模型,对四足机器人进行运动学仿真研究。
1 建立虚拟样机模型
本文要研究的机器人分别由4个独立的脚落地进行支撑。每条腿分别由髋关节舵机、膝盖关节舵机、脚踝关节舵机以及连接其部件组成,即每条腿具有3个自由度,如图1所示。

图1 四足机器人实体模型Fig.1 Solid model of four-legged robot
虚拟样机的建立采用的是ADAMS(automatic dynamic analysis of mechanical system)软件,是世界上最具权威性的,使用范围最广的机械系统动力学分析软件[5]。在ADAMS中建立模型的方法有2种:一种是利用ADAMS自己的零件库建立虚拟样机模型;一种是在其他三维建模软件(例如:pro/E,UG)建立模型,导入到ADAMS中,通过添加约束、运动函数和力等建立虚拟样机模型[6]。由于ADAMS虽然有强大的仿真分析功能,但在实体建模功能比较薄弱,因此采用第2种方法,即在UG中建立三维模型,保存为Parasolid(*.x_t)格式再导入(import)到ADAMS中,如图2所示。

图2 四足机器人虚拟样机模型Fig.2 Virtual prototype model of four-legged robot
2 步态规划
步态是多足机器人的一种迈步方式,是多足机器人各腿间协调运行的规律,即各个腿抬腿和放腿的顺序。多足机器人的步态生成是与所应用的机器人本身机构特点及运动特征紧密相连的[7-8]。多足动物行走时具有诸如爬行、小跑以及奔跑等不同的步态,但目前多足步行机器人的爬行运动是可以实现的[4]。根据研究的四足机器人的结构特点,昆虫的爬行步态最为合适,昆虫的步态多种多样,主要有3种。
1)三角步态
三角步态的规则是在步行时将六只足分为两组,以身体一侧的前足、后足与另一侧的中足作为一组,其他三只足作为另一组。当一组足同时提起时,另一组足支撑身体,并以中足为支点,前足胫节肌肉收缩,拉动身体向前,后腿胫节肌肉收缩,推动身体向前,此时虫体的中心落在另一组足的三角形上,以此往复交替,实现快速行走。这种步态可以使昆虫随时随地停息和运动,三角形的支撑点也使虫体站立与行走更加稳定。因此,三角步态是一种效率很高的行走方式,其占空系数略大于0.5。而且由于这种步态的腿部状态只有2种:支撑和前摆,实现起来比较简单,即使采用机构也可以实现,所以在许多控制系统简单的仿生机器人中广泛采用[9]。
2)四足步态
四足步态是相对缓慢的一种步态,每一时刻都有4条腿在地面支撑,而每侧各有一条腿向前摆动,这种步态由于支撑时间较长,可以承受比较大的载荷。其占空系数约为0.67,稳定系数为4[10]。
3)波动步态
波动步态是最为缓慢的一种步态,每一时刻都有5条以上的腿支撑地面,整个身体缓慢平稳的向前移动。其占空系数大于0.83,稳定系数大于5[10]。
由于昆虫是多足动物,所以它在运动时可以同时抬起处于同一对角线上的一对足或是相互关联的多对足,从而实现又快又稳定的三角步态。但是,由于本次设计的机器人为四足机器人,如同时抬起3条腿,整个身体必定会发生较大的倾斜,因此步态规划最多同时能抬起2条腿或者是一条腿。并且,研究的四足机器人的足部结构为面接触式,同时抬起2条腿足以保证其稳定性,因此,在提高机器人爬行速度的考虑下,规划了机器人的爬行步态为以对角线的2条腿同时抬起行走;机器人重心在地面投影为直线;抬腿过程中,脚底板始终与地面平行;运动过程中四足爬行机器人机体始终保持与地面平行。这种步态可以在保证机器人平稳行走的同时,提高机器人的行走速度及效率。在1个周期内,机器人相当于迈步2次。机器人腿部抬起向前摆动,落地时通过脚面摩擦力使2条腿恢复原状同时带动机器人向前位移,2条腿同时抬起、同时恢复原位的方案也可以大大提高向前的动力。根据规划的步态得到各腿的末端轨迹,如图3、图4所示。
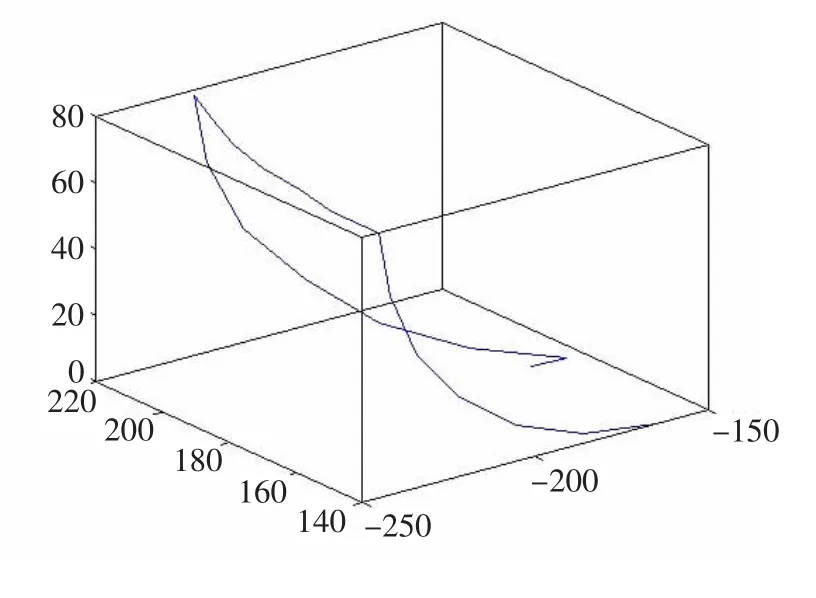
图3 腿1运动时1个周期内的轨迹曲线Fig.3 Trajectory curve of leg.1in one cycle
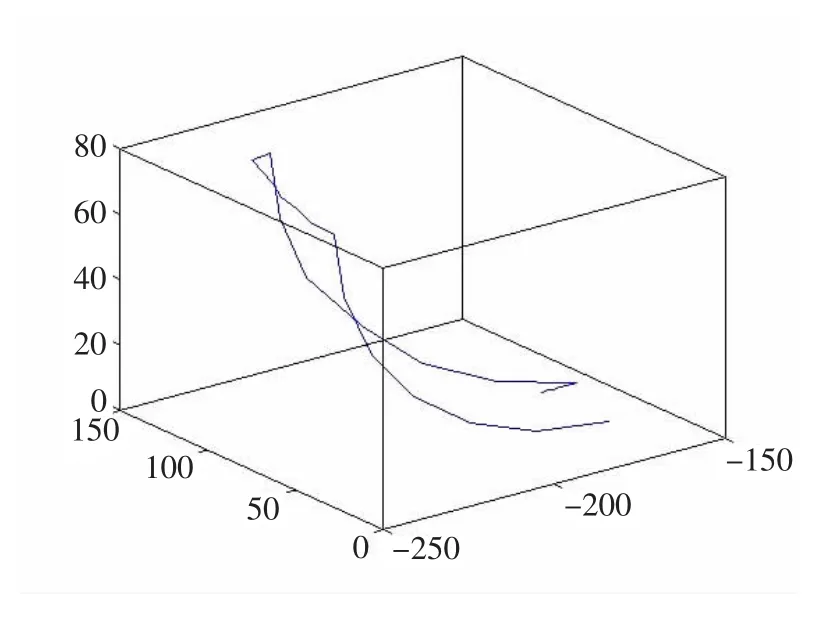
图4 腿3运动时1个周期内的轨迹曲线Fig.4 Trajectory curve of leg.3in one cycle
3 关节控制曲线的导入
根据爬行机器人结构(如图5所示)建立机器人逆运动学数学方程,即根据已知的末端执行器的位置和姿态,求解相应的关节变量。基于MATLAB建立其逆运动学,计算得到机器人爬行时各关节的运动轨迹曲线,如图6—图8所示(以腿1为例)。

图5 爬行状态下四足机器人的结构简图Fig.5 Schematic diagram of the structure of four-legged robot in crawling status

图6 腿1髋关节变化曲线Fig.6 Motion curve of hip joint of leg.1

图7 腿1膝关节变化曲线Fig.7 Motion curve of knee-joint of leg.1
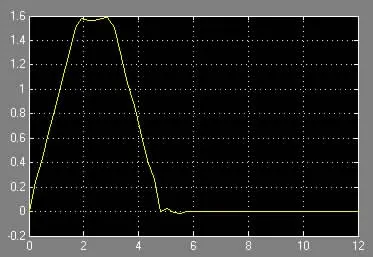
图8 腿1踝关节变化曲线Fig.8 Motion curve of ankle joint of leg.1
从图6—图8可以看出,各关节运动状态平稳,腿1髋关节的角度变化大致为-30°~0°,腿1膝关节的角度变化大致为-90°~0°,腿1踝关节的角度变化大致为0°~90°,符合步态规划要求。
由于ADAMS中需要将MATLAB生成的各个关节的变化曲线作为四足爬行机器人虚拟样机上各个相应舵机的输入量来控制舵机的变化,所以将MATLAB中得到的关节运动轨迹进行离散化,离散后的数据保存为文本(*.txt)文件。将离散后的数据(选择输入的.txt文件格式为Text Data格式)导入到ADAMS中生成样条曲线(Spline)。通过Cubic Fitting Method指定到相应的关节驱动中,这样,机器人各个关节就能够按照规划的轨迹运动[11-12]。
4 运动学仿真分析
在ADAMS中建立完虚拟样机模型后就可以进行各种运动学、动力学仿真分析。
通过仿真,可以看到,机器人按照规划好的步态进行正常的运动仿真,如图9所示。

图9 四足机器人的运动步态Fig.9 Motion gait of four-legged robot
测量各腿末端在x,y,z方向上的轨迹,如图10—图14所示,与规划的步态对比,测量结果与规划轨迹基本一致,末期仿真曲线的波动是仿真时摩擦力的设置与实际情况有差异导致。

图10 腿1立足点1个周期内在x轴上的轨迹曲线对比图Fig.10 Contrast simulation with planning through the trajectory curve of leg.1along xaxle in one cycle
测量机体(即四足爬行机器人整体)在y轴(即前进方向)的运动曲线,由图11可知,四足爬行机器人在1个周期内(12s)行走了约55mm。

图11 腿1立足点1个周期内在y轴上的轨迹曲线对比图Fig.11 Contrast simulation with planning through the trajectory curve of leg.1along yaxle in one cycle

图12 腿1立足点1个周期内在z轴上的轨迹曲线对比图Fig.12 Contrast simulation with planning through the trajectory curve of leg.1along zaxle in one cycle

图13 机体在1个周期内的前进位移Fig.13 Displacement along yaxle of the body of four-legged robot in one cycle
测量机体在x轴(即左右方向)的运动曲线,由图12可以看出,虽然机体在x轴波动明显,但是波动范围很小,大致在-3~3mm之间。机体最后波动较大的原因在于1个周期运动停止时,机体由脚部的摩擦力时机器人整体向外偏移,不影响机器人运动过程中整体的稳定性。

图14 机体在1个周期内的左右偏移位移Fig.14 Displacement along xaxle of the body of four-legged robot in one cycle
5 结 论
本文对所研究的四足机器人进行了步态规划和逆运动学分析,根据其逆运动学方程得出各个关节的转角变化曲线,进一步离散化处理得到关节转角变化样条曲线,基于ADAMS建立了四足爬行机器人的虚拟样机模型,通过导入的转角变化样条曲线来控制机器人各个关节舵机,使机器人按照所规划的步态进行仿真运动。
基于ADAMS进行的运动学仿真分析,其结果直观地反映了四足机器人的运动步态,得到的末端轨迹曲线验证了步态规划的合理性和运动学分析的正确性,为四足爬行机器人的步态规划提供了一种新思路、新方法。
/References:
[1]张小峰,俞志伟,张 昊,等.基于MATLAB仿壁虎机器人仿生步态规划与仿真[J].高技术通讯,2011,21(2):185-190.ZHANG Xiaofeng,YU Zhiwei,ZHANG Hao,et al.MATLAB based gait planning and simulating of a robot inspired by gecko locomotion [J].High Technology Letters,2011,21(2):185-190.
[2]张锦荣,王孝润.基于虚拟样机技术的四足机器人仿真研究[D].西安:西北工业大学,2007.ZHANG Jingrong,WANG Xiaorun.Simulation Research on A Four-Legged Robot Based on Virtual Prototype Technology[D].Xi′an:Northwestern Polytechnical University,2007.
[3]刘东辉,郑楠楠,杨丽丽,等.基于 Matlab Simulink和VR工具箱的双足行走仿真[J].河北科技大学学报,2011,32(3):238-241.LIU Donghui,ZHENG Nannan,YANG Lili,et al.Simulation of bipedal walking based on matlab simulink and VR toolbox[J].Journal of Hebei University of Science and Technology,2011,32(3):238-241.
[4]陈学东,孙 翊,贾文川.多足步行机器人运动规划与控制[M].武汉:华中科技大学出版社,2006.CHEN Xuedong,SUN Yi,JIA Wenchuan.Motion Planning and Control of Multi-Legged Walking Robots[M].Wuhan:Huazhong University of Science and Technology Press,2006.
[5]郑 凯,胡仁喜,陈鹿民,等.ADAMS2005机械设计高级应用实例[M].北京:机械工业出版社,2006.ZHENG Kai,HU Renxi,CHEN Lumin,et al.ADAMS2005 Advanced Application Cases of Machine Design[M].Beijing:China Machine Press,2006.
[6]杜志江,张 博,孙立宁,等.基于虚拟样机技术的双足机器人运动仿真研究[J].系统仿真学报,2007,19(19):4 454-4 456.DU Zhijiang,ZHANG Bo,SUN Lining,et al.Research on motion simulation of biped walking robot based on virtual prototype technology [J].Journal of System Simulation,2007,19(19):4 454-4 456.
[7]董金波.双足机器人步态规划与运动学仿真研究[J].机械与电子,2011(7):66-68.DONG Jinbo.Research of gait planning and kinematics simulation for biped robot[J].Journal of Machinery and Electronics,2011(7):66-68.
[8]孟宪春,孟广柱,张建华,等.八轮腿移动机器人平台越障性能研究[J].河北工业大学学报,2012,41(6):35-39.MENG Xianchun,MENG Guangzhu,ZHANG Jianhua,et al.Research on eight-wheel-legged robot platform obstacle crossing[J].Journal of Hebei University of Technology,2012,41(6):35-39.
[9]漆向军,陈 霖,刘明丹.控制六足仿生机器人三角步态的研究[J].计算机仿真,2007,24(4):158-161.QI Xiangjun,CHEN Lin,LIU Mingdan.Research on tripod gait of controlled hexapod bionic robot[J].Journal of Computer Simulation,2007,24(4):158-161.
[10]韩宝玲,王丽秋,罗庆生.六足仿生步行机器人足端工作空间和灵活度研究[J].机械设计和研究,2006,22(4):10-13.HAN Baoling,WANG Liqiu,LUO Qingsheng.Mechanical optimization and analyses of hexapod walking bio-robot[J].Journal of Machine Design and Research,2006,22(4):10-13.
[11]荣学文,吴利宁,李云江,等.基于ADAMS的机器人三维实体动画仿真[J].煤矿机械,2004(2):21-40.RONG Xuewen,WU Lining,LI Yunjiang,et al.3Dsolid animated simulation of robot based on ADAMS[J].Journal of Coal Mine Machine,2004(2):21-40.
[12]王 南,王 晶,平恩顺.基于ADABS/Car的双横臂悬架的运动学建模与仿真[J].河北工程大学学报(自然科学版),2010,27(4):55-58.WANG Nan,WANG Jing,PING Enshun.Kinematics modeling and simulation of double wishbone suspension based on ADAMS/Car[J].Journal of Hebei University of Engineering(Natural Science Edition),2010,27(4):55-58.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
装备制造技术(2020年4期)2020-12-25
河北省科学院学报(2020年1期)2020-05-25
作文周刊·小学一年级版(2020年4期)2020-04-26
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
娃娃画报(2017年9期)2017-11-21
数学大王·中高年级(2017年4期)2017-04-10
时代农机(2016年6期)2016-12-01
海军航空大学学报(2015年1期)2015-11-11
