
考虑系统延时的三相APF切换系统建模与H∞控制
2013-10-17 14:14向伟铭邱存勇
电力自动化设备 2013年12期
韩 璐,肖 建,向伟铭,邱存勇
(西南交通大学 电气工程学院,四川 成都 610031)
0 引言
有源电力滤波器(APF)是实时补偿谐波电流的有效方法,它通过控制功率开关器件的开断,产生与负载侧谐波大小相等、方向相反的谐波电流注入电网侧,达到补偿谐波电流的目的[1-2]。从三相APF的工作原理可以看出它是典型的切换系统,具有非线性、多模态等特点。突破传统对APF的近似线性化分析方法[3-4],利用切换系统的相关理论[5-6]对其建模和分析可体现其动态混杂特性,更精确地反映了APF的物理工作过程。
目前数字信号处理芯片(DSP)被广泛用于APF装置中,APF的数字化控制方式已成为主流[7-9]。但是数字化控制在易于开发、灵活性强的同时会不可避免地引入系统延时[8,10-12],该延时虽然很小(几个采样周期),却会引起系统输入-输出相移,导致APF的谐波补偿性能下降,相移严重时会引发LC谐振使得系统失稳,这对实时性要求很高的APF而言是十分不利的。文献[12]提出通过在电流检测环节中增加相位补偿环节、提高系统采样频率或信号预测的方法来补偿延时对系统的影响。这类方法的时滞补偿效果很好,但需要增加额外的补偿设备或者改变系统的相关参数来实现,增加了系统的复杂性,也可能引入新的问题。
在三相APF的控制过程中,前馈控制[13-14]能够快速跟踪负荷侧谐波变化,但需要精确的模型和参数,且预测的指令电流和实际指令电流之间会有误差,可能导致系统某次谐波放大,从而恶化补偿效果。而状态反馈控制可以抑制这种误差,保证系统稳定性。更进一步,考虑到数字化APF的延时现象,为了在宽频带范围内保证APF的性能指标,在状态反馈控制中必须考虑系统时滞补偿。通常,APF的主电路为电压型PWM逆变器,时间延迟环节的频率特性可以通过一阶惯性环节来表示[15]。
针对APF的工作原理与工作特性,文献[14,16]已经对基于切换理论的APF的建模与H∞控制问题进行了初步研究,得到关于APF建模与分析的新方法。该方法为变流器的分析和设计开拓了一个新的思路,但是也存在一些需要改进的地方,例如其在APF建模过程中依然采用了近似线性化的方法,基于该模型的分析控制方法必然存在一定的保守性,另外其控制器的设计也基本采用单纯的反馈控制,且没有考虑系统延时对APF补偿效果的影响。
基于以上分析,本文提出基于离散时滞切换系统理论的三相APF建模与控制方法。首先,在APF建模时考虑数字化控制产生的时滞现象,通过时间延迟环节的频率特性和功率管的开关规律得到APF的时滞离散切换模型,其中电网侧谐波电流作为控制输出,前馈控制的指令谐波电流与理想指令谐波电流的误差作为干扰项。这样APF的电流跟踪控制问题就转化为仿射离散切换系统的鲁棒H∞控制问题。针对本文提出的APF仿射时滞离散切换模型设计对应的H∞反馈控制器,并通过仿真验证该控制器相对于无时滞补偿的H∞反馈控制器的优越性。
1 基于离散切换理论的时滞APF系统建模
APF是谐波抑制和无功补偿的有力工具,其对补偿实时性和精确性有很高的要求。为了满足工程中对APF的性能要求,设计可靠灵活稳定的控制系统,建立精确的APF模型显得十分重要。目前数字化APF在工程中应用广泛,由于其数字处理的间断性以及功率开关器件开断在工作中呈现的多种开关模式,三相APF可以看作典型的离散切换系统,利用切换系统相关理论建模可以精确反映其物理工作过程。同时,三相APF中数字化控制器引起的系统延时也不容忽视。文献[12]指出,高频谐波对数字化控制器产生的延时非常敏感,延时的存在直接影响APF的PWM过程和整体的补偿效果,严重时还会通过放大高频段的谐波产生谐振现象,进而对系统稳定造成严重威胁。所以本文基于离散切换系统理论对三相APF建模的同时将系统时滞考虑到模型中,精确的APF模型更有利于设计可靠灵活的系统控制器,进而满足APF的性能要求。
1.1 三相数字化APF系统结构
图1为三相数字化APF系统结构图,其中APF是基于电压型变流器(VCR)结构的功率逆变电路,它与非线性负荷并联接入电网。每个采样周期检测负载侧的高次谐波电流分量,得到指令电流并通过电流跟踪控制方法在每个切换控制周期触发输出PWM方波驱动功率开关元件VT1—VT6的通断,使得APF产生的实际补偿电流icj实时跟踪指令值从而抵消掉电网侧谐波,达到谐波补偿的目的。图中isj和usj分别为电网侧电流和电压,rsj为电网内阻,La=Lb=Lc=L为三相滤波电感,ra=rb=rc=r为功率开关管损耗的等效电阻,Cdc为变流器直流侧电容,udc为直流电容电压。

图1 三相数字化APF系统结构图Fig.1 Configuration of three-phase digital APF system
忽略电网内阻,根据基尔霍夫定律,图1所示系统的动态方程如下:

1.2 系统时滞模型
三相APF系统延时产生的最主要原因是数字化控制器控制信号的离散化[11],由于切换控制信号的发生周期一般都大于系统采样周期,所以APF发出的补偿谐波未能实时跟踪负载侧谐波变化。该延时的大小可以通过DSP的采样计算过程与切换控制过程的相互关系得到。
为了体现系统中的时滞因素,分析时滞模型时本文只考虑时滞现象引起的系统谐波补偿跟踪误差。令三相APF的数字化控制器引起的系统延时为τc,则τc可以表示为APF实际补偿的谐波电流滞后于指令谐波电流的时间间隔。一般地,系统滞后频率特性可以通过一个一阶惯性环节 Gdl(s)=1/(1+sτc)近似表示[15]。根据基尔霍夫电流定律,指令谐波电流到电网侧谐波电流isHj的结构图如图2所示。图中iLj为负载侧谐波电流,则根据图2得:

其中,j=a,b,c。
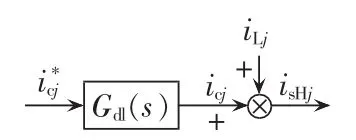
图2 电网侧谐波电流的产生Fig.2 Generation of grid-side harmonic current
1.3 基于切换系统的三相APF状态空间模型
为了实现三相APF产生的补偿电流快速跟踪指令谐波电流,本文采用前馈控制其中 Gr为控制输入增益为控制环的参考输入,并取前馈指令信号为由于前馈控制采用预测的方式,要求精确的模型和参数,所以实际前馈控制指令总是和理想控制指令存在误差,这种误差可能导致谐波放大引起系统不稳定,所以必须通过反馈控制加以抑制。本文将实际前馈控制指令与理想控制指令间的误差看作系统干扰[17],记为ω,提出前馈控制u′与反馈控制u相结合的控制规律,使系统在保证跟踪性能的同时实现系统稳定。令则由式(2)可得:

由式(3)可以看出 a、b、c 三相的电网侧谐波电流isHj表达式完全一致且解耦,所以系统分析中可只考虑单相网侧谐波电流,此处只考虑isHa。结合式(1),可得系统状态方程为:
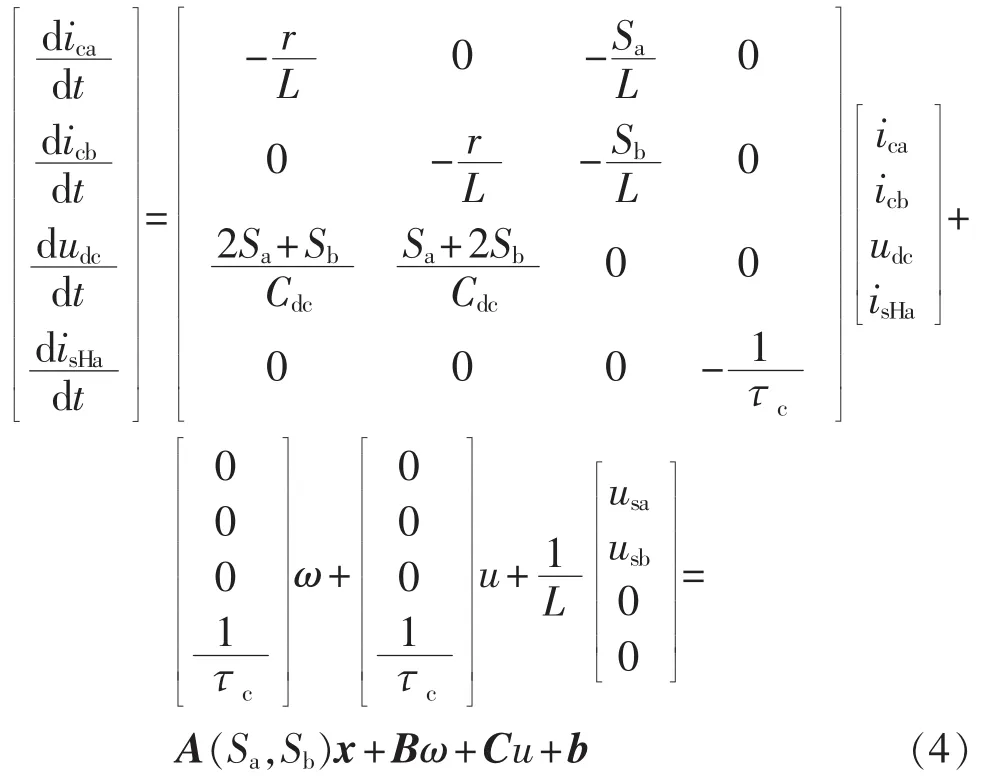
由于开关函数Sa和Sb的不同组成,三相APF有8种工作模式,式(4)可以改写成系统切换状态方程如下:

其中,B=C。
又考虑到三相APF的目的是消除电网侧谐波电流,本文选择系统输出为y=isHa,即:

其中,D=[0 0 0 1]。
式(5)、(6)得到的系统切换模型是基于连续时间的,为了设计直接适用于数字化APF的系统控制器,系统模型应该转换为等价的离散切换模型。通过线性离散化方法,等价的系统离散切换模型如下:

由上述分析可知,系统通过设计反馈控制器u减弱干扰ω对控制输出y,即网侧谐波电流isHa的影响,使得isHa的值趋向于尽可能小的数,这种控制是典型的 H∞控制[18],结构框图如图3所示。图中K为反馈控制器增益。

图3 H∞控制结构框图Fig.3 Block diagram of H∞control
2 H∞控制器设计
2.1 仿射离散切换系统简化
式(7)所示的三相APF切换系统模型为典型的仿射离散切换模型,Hi(k)为仿射项且不恒为零。对于此类系统,不能直接利用鲁棒H∞控制原理设计系统控制器,而需要先对切换系统模型进行处理。文献[19-20]通过拓展状态空间的方法分析了在仿射项不为零情况下的仿射切换系统H∞控制问题,但该方法由于拓展的系统矩阵不再稳定进而不可能找到对称矩阵P满足李雅普诺夫条件,所以有很大局限性。本文采用拓展输入信号ω(k)的方法对仿射切换系统处理后进行H∞控制,详细过程如下。
考虑到切换系统中仿射项因素,将输入信号ω(k)拓展为以下形式,如式(8)所示:

这样,系统式(7)就可以写成:

这里考虑的H∞结构是以有限范围的L2增益为基础的,所以提出的扰动输入ω(k)的拓展方式是可行的。
假设反馈控制量有如下形式:

将控制规则式(11)代入系统切换模型式(9)后,得到三相APF的闭环离散切换系统如下:

2.2 H∞控制器设计
基于上述对仿射离散切换系统的简化处理,本文得到了鲁棒控制的典型控制对象式(12),从而可以利用鲁棒控制的相关结论[18]得到适用于该类切换系统的H∞控制器设计方法,如定理1表述如下。
定理 1 对于仿射切换系统式(12),当 x(k)ϵχi,时,如果存在正定对称矩阵、合适维数的矩阵以及正数 γ>0使得LMI矩阵不等式

成立,则系统式(12)鲁棒镇定且具有H∞性能界γ,同时使系统式(12)鲁棒镇定且具有H∞性能界γ的状态反馈阵由下式给出:

其中,χi、χj分别为第i个和第j个子系统的作用域,Ti=DQi。

写成矩阵不等式的形式为:
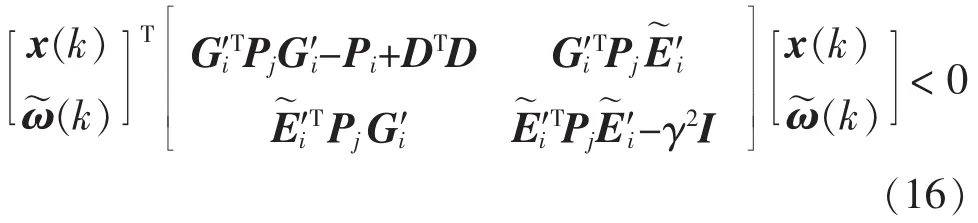
为了满足式(16)只需使得:
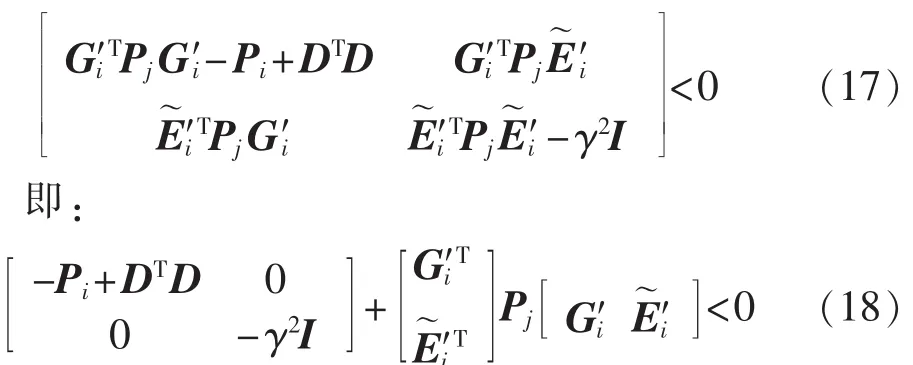
根据 schur补引理[18]可知,式(18)等价于:

b.在零初始条件下,引入性能指标

3 仿真分析
为了验证本文关于三相APF时滞切换模型的正确性以及基于系统时滞补偿的H∞控制器较普通控制器的优越性,本节对三相APF系统在MATLAB软件环境下进行了数字仿真实验。取负载为不可控三相整流负载,系统采样频率为10 kHz,电网侧电压为 380 V/50 Hz,电网内阻 rsj=0.01 Ω(j=a,b,c),直流侧电容Cdc=10 mF,交流侧三相滤波电感Lj=0.0162 H(j=a,b,c),直流侧电压 udc=700 V。
三相APF的数字化控制系统通常采用主从DSP的形式,主DSP工作在采样周期T下,从DSP采用切换控制周期Ts。在每个采样周期T,主DSP完成主要控制程序的计算,将调制信号发送至从DSP处。从DSP通常在切换周期的中点处更新调制信号后在下一个切换周期利用该调制信号产生PWM波来控制APF开关管的通断,所以若T=Ts,由DSP数字控制器产生的时间延时大约为1.5 T。取系统延时τc=1.5 T,H∞控制器中γ=0.2,并假设理想指令谐波电流通过瞬时无功功率理论给出。每个采样周期利用李雅普诺夫函数最小原则切换子系统,并通过设计对应时滞子系统的H∞反馈控制器K1i和K2i补偿时滞,使得系统稳定。因为前馈预测控制在子系统建模时已经考虑,所以这种设计方式在保证系统稳定的同时也保证了谐波电流的跟踪性能。为了更清晰地说明系统时滞现象对APF工作性能的影响,并验证本文提出的时滞补偿方法的优越性,分别对控制环节中有时滞补偿和无时滞补偿的APF进行对比仿真实验。图4为负载侧谐波电流波形和傅里叶分析,图5为在时滞补偿和非时滞补偿H∞控制下的a相网侧电流及其频谱分析。其中μ为各次谐波电流与基波电流幅值比值,n为谐波次数。
对比图4与图5可以看出,本文提出的三相APF离散切换模型和切换规则很好地体现了APF的物理工作特性,a相网侧电流在APF补偿后畸变率大幅下降。而图5(a)和图5(b)的对比波形也暗示了如果数字化控制器引起的系统时滞不得以补偿,则会引发LC线路谐振,进而导致网侧电流振动,严重时还会影响系统稳定。

图4 负载侧谐波电流波形和傅里叶分析Fig.4 Waveform and Fourier analysis of load-side harmonic current

图5 不同H∞控制器下的a相网侧电流及其频谱分析Fig.5 Waveform and spectrum of grid-side current for different H∞controllers
另外考虑负载侧电流突变,即在系统遇到扰动的情况下,对比传统PI控制的三角波载波调制控制与带时滞补偿的H∞控制对系统补偿效果的影响。a相负载侧谐波突变电流如图6所示,PI控制的三角波载波调制控制下与考虑时滞的H∞控制下的网侧电源电流如图7所示。
由图7清晰地看出,较传统的控制方法,H∞控制方法的鲁棒性更强,在负荷突然增加后,APF的输出快速跟踪了这一突变,使得网侧电流依然为正弦电流。而在传统控制方法下,系统网侧电流无法快速跟踪突变,且在干扰严重时系统容易失去稳定。
综上所述,本文提出的考虑系统时滞的APF切换系统建模与对应的H∞控制器设计方法是十分有意义的,更符合工程实际要求。

图6 负载侧谐波突变电流Fig.6 Suddenly-increased load-side harmonic current


图7 不同控制器下的a相网侧电流Fig.7 Waveform of phase-a current at grid side for different controllers
4 结论
APF数字化控制引起的系统延时不但会影响滤波装置的补偿效果,严重时还会对系统的稳定性构成威胁。本文考虑了数字化APF的动态工作特性和系统时滞现象,采用切换系统理论对三相APF建模,得到仿射离散时滞切换系统模型,并针对该模型设计可补偿时滞的H∞反馈控制器以及切换规律。这种基于切换系统理论的APF建模方法优于传统针对APF的近似线性化建模方法,更加精确地反映了系统物理动态特性。整个分析过程融合了前馈控制与反馈控制2种控制方式,并且考虑了系统延时因素,更符合工程实际要求。本文提出的建模与控制方法对于进一步采用切换系统理论研究其他PWM变换器也具有一定的参考价值。
猜你喜欢
防爆电机(2020年5期)2020-12-14
数学物理学报(2020年5期)2020-11-26
自动化仪表(2020年10期)2020-11-13
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年14期)2019-08-20
自动化学报(2019年6期)2019-07-23
北方工业大学学报(2019年5期)2019-03-30
电子制作(2019年23期)2019-02-23
船舶力学(2015年6期)2015-12-12
