
基于模糊控制的温室温度控制的研究
2013-11-14 07:17杨莲红
昌吉学院学报 2013年6期
刘 红 杨莲红 王 超
(1,2,3.昌吉学院物理系 新疆 昌吉 831100)
1 引言
对于北方地区,温室的应用及温室环境的控制研究具有非常重要的意义。温室作为设施农业的一部分,可以改变植物生长环境,为植物生长创造最佳条件,避免外界四季变化和恶劣气候的影响。温室设施的关键技术是环境控制,该技术的最终目标是提高控制与作业精度[1]。温室环境控制的根本目标是将温度、湿度、光照、CO2浓度等环境因子控制在适宜的范围内,从而有利于作物的生长和发育,实现高效生产。然而温室控制是一个复杂的大系统,具有非线性、时变、分布参数、多变量间的强烈耦合、较大的随机干扰、过程机理错综复杂等特点,难以建立精确的数学模型,对于那些难以建立数学模型的复杂被控对象,采用传统的控制方法,包括基于现代控制理论的控制方法,都很难取得较好的控制效果。模糊控制从本质上来说是一种非线性智能控制技术,它无须知道被控对象的精确数学模型,而是根据经验控制行为,遵循反馈及反馈控制思想,总结成一系列控制规则,并运用软件程序加以实现。因此采用模糊控制技术可以较好地实现温室环境的灵活调节并达到降低能耗的目的[2,3]。
2 模糊控制器的设计
2.1 模糊控制系统的组成
模糊控制又称为模糊逻辑控制,基本原理如图1所示[4]。其基本思想是借助于计算机和模糊集合理论来模拟人对系统的控制过程。它是以人的控制经验作为控制的知识模型,以模糊集合、模糊语言变量和模糊逻辑推理为基础的微机数字控制。模糊控制系统一般由模糊控制器、输入输出接口装置、检测装置、执行机构、被控对象等部分组成,构成了一个负反馈模糊控制系统[5]。

图1 模糊控制系统原理图
模糊控制系统的原理为:系统通过下位机如PLC(或单片机)采样获取被控量的精确值,然后将此量与给定值比较得到误差信号E,把误差信号的精确量模糊化变成模糊量,得到了误差E的模糊语言集合的一个子集e再由模糊控制规则R(模糊关系),根据推理合成规则进行决策,得到模糊控制量为u=e R(式中u为模糊量)。为了对被控对象施加精确的控制,还需将模糊量u转化为精确的数字量,经D/A转换,送给执行机构,从而对被控对象实施控制,从而控制了加热器燃料控制阀及通风机变频器,实现阀门开闭及风机风量大小的平滑切换。
2.2 模糊控制过程
模糊控制过程可以分为3个步骤:分别为模糊化过程、模糊推理过程和反模糊化过程。模糊化过程就是将基础论域上的精确量变换为量化论域上的模糊集的过程。其主要功能就是根据输入变量的隶属度函数求出精确输入量相对于输入变量各语言值的隶属度。模糊推理过程就是对于给定的模糊输入量,模糊控制器根据判定的模糊规则和事先确定好的推理方法进行模糊推理,求出模糊输出量的过程。模糊推理是模糊控制器的核心,它具有模拟人类基于模糊概念的推理能力,是基于模糊逻辑中的蕴含关系及推理规则来进行的。反模糊化过程就是将模糊量变换成量化论域上的确定值的过程,它要求在推理得到的模糊集合中取一个最能代表这个模糊推理结果可能性的精确量,去控制或驱动执行机构。反模糊化方法包括最大隶属度法、中位数法、加权平均法等。
2.3 模糊控制器设计[6、7、8、9]
本文采用双输入单输出控制结构,该系统的输入为温度的误差e和温度的误差变化率Δe,这两个量的实际变化范围称为各自的基本论域,分别记为[-e,e]和,[-Δe,Δe]。误差e和误差变化率Δe所取的模糊集合的论域为X=[-x,x],把此论域转换成整数N=[-n,-n+1,…,-1,0,1,…n-1,n]。在本系统中n=6,所以模糊集合论域为[-6,6],通过量化因子k进行论域变换,其中量化因子k为:

若有一个元素a在X论域中,就可以在论域N中找到相应的元素y:

最后对y采用四舍五入的方法对整数。
由量化因子的定义则可以得到误差e和误差变化率Δe的量化因子:

对于比例因子ku,定义为:

首先确定量化因子和比例因子,这样系统的误差e和误差变化率Δe就可以被量化为论域上的某一个元素值。当n确定之后,量化因子k的取值大小可以使基本论域[-e,e]和[-Δe,Δe]不同程度的缩小和放大,当k小时,基本论域[-e,e]和[-Δe,Δe]会放大,当k大时,基本论域[-e,e]和[-Δe,Δe]会缩小,也就是说,量化因子和比例因子都会对控制器的输出有着直接的影响。所以合理的选择量化因子和比例因子是非常重要的。
根据控制经验,当温室内温度较低时,一般要关闭天窗、侧窗、湿帘-风机系统、喷灌系统,当温室内温度要大于设定温度时,按照温度超出设定温度的程度,依次要打开天窗、侧窗、遮阳网、排风系统、湿帘-风机系统[10、11]。根据专家知识经验总结出模糊控制规则表1:表中{NB,NM,NS,ZE,PS,PM,PB}表示{负大,负中,负小,零,正小,正中,正大}

表1 模糊控制规则表
在大多数情况下,为了减少在线计算量,往往通过离线计算,形成由输入量和与之对应的控制量为内容的模糊控制表。实时控制时,模糊控制器首先把输入量量化到输入量的语言变量论域中,再根据量化的结果去查模糊控制表,求出相应的控制量来实施控制这样可大大提高模糊控制的实时效果,节省内存空间[12]。
3 温度模糊控制的仿真试验研究
为验证设计方案和模糊控制策略的正确性,获得更好的控制效果,对温室自动控制系统的温度控制进行仿真试验的研究。本系统的仿真是借助MATLABA的动态系统仿真工具SIMULINK及模糊控制工具箱来实现。
3.1 仿真试验模型的建立
在本文的温室控制系统中,要求室内温度稳定在21℃,即室内温度设定值为21℃不变,而室内的热源是随机变化的,即控制系统的干扰是不断变化的。因此,在恒温控制系统仿真中,主要对干扰变化进行仿真,并且考虑阶跃干扰变化的情况。本文将同时对PID控制、模糊控制进行仿真比较。
由SIMULINK软件包则可以建立如图2所示的温室温度控制系统仿真框图。
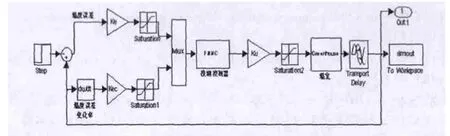
图2 温室温度控制仿真结构图
3.2 仿真试验结果分析
对于温度控制系统分别采用常规的PID控制和模糊控制进行仿真试验,得到系统的响应曲线分别如图3和图4所示。

图3 PID控制仿真曲线
由图3可以看出,PID控制方法的控制响应曲线超调大,响应速度慢,调节时间长,振荡大,稳态误差大。此种控制方法不理想。

图4 模糊控制仿真曲线
由图4可以看出,模糊控制方法的控制响应曲线有超调,响应速度比PID控制要快,调节时间也要比PID控制短,有振荡,稳态误差也小。模糊控制比较理想,较好地满足温室控制要求。
4 结论
由于温室是一个复杂的大系统,难以建立适当的数学模型,因此本文把模糊控制理论与技术应用在温室控制系统中就温室的模糊控制进行简要的分析,设计了模糊控制器,并利用MATLAB仿真软件对温室温度控制进行了仿真试验。结果表明,模糊控制策略与常规的PID控制相比超调量小,调节时间短,控制过程比较平稳,控制效果好,能很好的改善系统的动态与静态特性。
[1]李慧,刘毅.温室控制技术的发展方向[J].林业机械与木工设备,2004,5(32):4-7.
[2]WANGXiao-han,DINGWe-imin.Fuzzy control of temperature in greenhouse[J].Journal of Nangjing agricultureUniversity,2000,23(3):110-113.
[3]S.L.Patila.Modelling of tropical greenhouse temperature by auto regressive and neuralnetwork models[J].Biosystems Engineering,2008,99(3):423-431.
[4]汤兵勇,路林吉,王文杰.模糊控制理论与应用技术[M].北京:清华大学出版社,2002.
[5]杜尚丰.温室环境温度智能控制算法研究[J].计算机测量与控制,2003,11(11):850-852.
[6]佟绍成.非线性系统的自适应模糊控制[M].北京:科学出版社,2006.
[7]李友善,李军.模糊控制理论及其在过程控制中的应用[M].北京:国防工业出版社.1996.
[8]汤兵勇,路林吉等.模糊控制理论与应用技术[M].北京:清华大学出版社,2002.
[9]孙增圻等.智能控制理论与技术[M].北京:清华大学出版社,广西:广西科学技术出版社,1997.
[10]郭炳辉,李进京.温室智能测控仪发展现状与前景展望[J].农业装备技术,2003.
[11]刘艳军,王伟.一类多变量非线性系统的自适应模糊控制[J].自动化学报,2007,33(11):1163-1169.
[12]胥芳,陈教料.玻璃温室小气候温湿度动态模型的建立与仿真[J].农业机械学报,2005,36(11):102-105.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
成都信息工程大学学报(2021年6期)2021-02-12
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
测控技术(2018年10期)2018-11-25
西南交通大学学报(2016年3期)2016-06-15
广东石油化工学院学报(2016年3期)2016-05-17
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
