基于准确度分析的汽轮机调节系统建模仿真软件
2013-11-25 02:44朱晓星盛锴宋军英
湖南电力 2013年2期
朱晓星,盛锴,宋军英
(1. 国网湖南省电力公司电力科学研究院,湖南 长沙410007;2. 国网湖南省电力公司,湖南 长沙410007)
开展汽轮机调节系统参数实测与辨识,建立电网稳定性研究所需的汽轮机调节系统数学模型,可用于系统地分析各种扰动条件下电网频率响应和负荷响应曲线,对于电网稳定性的分析具有重要的实用价值〔1-5〕。
汽轮机调节系统模型是电网四大元件模型之一,其真实性直接影响电网系统仿真的精度〔6-12〕,因此,模型参数辨识方法的准确性和仿真校核方法的可靠性越来越受到重视。近年来有学者开发了汽轮机调节系统参数辨识与仿真软件,但由于缺乏表征仿真校核准确程度的参数和指标,这些软件的仿真功能都只是简单地把实测曲线与仿真曲线进行粗略的人工比较,没有定量和定性地分析仿真准确程度。
文献〔13〕Q/GDW 748 -2012 《同步发电机原动机及其调节系统参数实测与建模导则》(下文简称《导则》)提出了仿真品质参数,并规定了仿真与实测对比中各品质参数的偏差允许值〔13〕。本文对汽轮机调节系统参数辨识和仿真校核技术进行了研究,并依据该导则,以Matlab/Simulink 为平台开发了1 套汽轮机调节系统参数,实现了原始试验数据的智能预处理、模型参数的智能辨识与结果选出、仿真品质参数偏差值的自动计算。
1 软件功能结构
软件分为数据预处理、参数智能辨识、智能仿真校核、辅助功能等四大功能模块,功能结构如图1 所示,其中带虚框的为软件内部实现的功能。
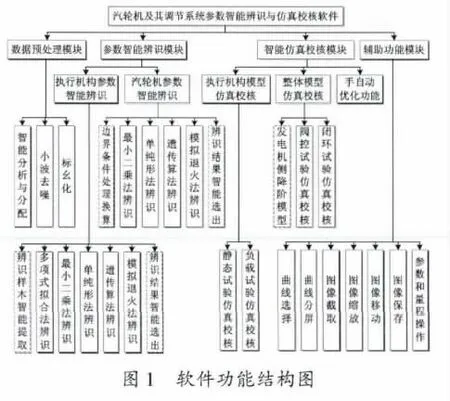
数据预处理模块可同时载入多个或单个原始数据文件,并自动分析原始数据文件格式,根据参数命名特征将各列原始数据智能分配给各参数变量,并提供小波去噪、数据标幺功能,以便进行后续的参数辨识和仿真校核。
参数智能辨识模块主要分执行机构参数智能辨识和汽轮机参数智能辨识共2 个部分,根据各部分参数辨识的特点,提供了多项式拟合、最小二乘法、单纯形法、遗传算法和模拟退火法等5 种辨识方法,可由用户自行选择其中的1 种或多种算法组合辨识,并自动对同一参数在不同辨识样本、不同辨识方法下的多个辨识结果进行最终值的智能选出。
智能仿真校核模块中,对复杂的发电机模型和励磁系统模型进行了合理简化,并利用Matlab/Simulink 建立了考虑发电机侧影响的汽轮机调节系统模型,可以很好地仿真出负载条件下频率阶跃扰动试验中常见的功率过调波峰,仿真曲线准确度高。根据《导则》要求,界面上提供了汽轮机执行机构模型分别在静态试验和负载试验条件下的仿真校核,以及汽轮机调节系统模型分别在阀控方式和闭环方式下的整体仿真校核等4 项仿真校核功能,能分别计算每一项仿真校核功能中各仿真品质参数的仿真与实测偏差值,从而判断辨识得到的模型参数准确度是否合格。
辅助功能模块中,提供了方便曲线、图像操作的一些功能,以及参数和量程的设置、保存与提取等功能,以便用户使用。
2 数据预处理
汽轮机调节系统的参数实测现场采集的数据量很大,不同数据采集仪的数据输出格式不统一,各个信号的量程和单位不相同,且必定含有噪声信号,因此无法直接用于参数辨识,必须先对现场采集的原始数据进行预处理。
本文对主流便携式高速数据采集仪生成的原始数据文件格式、现场需采集的各参数命名规律、现场实测中影响原始数据输出格式的常见问题等进行了分析,基于Matlab 编写了用于原始数据智能分析函数varconfirm,其格式如下:
function [oriData txtDataName DataFields varflag pl row ] =varconfirm (fullname)
其中,返回的参数意义见表1。
通过编写varconfirm 函数,实现了自动分析各主流便携式高速数据采集仪生成的原始数据中包含何种参数、将原始数据分配给各个参数变量,以及自动计算采样周期、采样时长等功能;当分析出错时,还能提供相应错误信息,指导用户处理。整个分析、分配的过程在用户选取了用于参数辨识的原始数据文件(可同时选择多个文件)之后自动进行,无需人工干预。
此外,软件还提供了小波去噪、数据标幺等〔14〕功能,与varconfirm 函数一起,实现了将原始数据用于参数辨识的整个预处理过程。
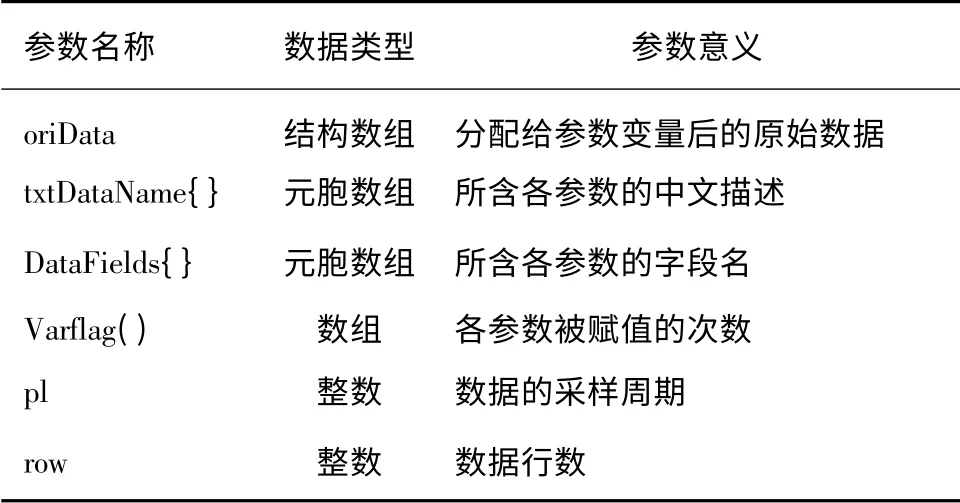
表1 智能分析函数varconfirm 的返回参数及意义
3 参数智能辨识
汽轮机调节系统的参数辨识与建模可分为调节系统、执行机构、汽轮机共3 个部分。调节系统的相关参数主要是通过控制逻辑检查、资料收集来获取,其过程相对简单;而执行机构和汽轮机的部分重要参数需要通过对现场实测数据进行辨识获得。
软件提供了“执行机构参数辨识”、 “汽轮机参数辨识”以及“其他参数辨识”等3 个参数辨识界面。
“执行机构参数辨识”的流程如图2。它主要是对静态条件下执行机构阶跃试验数据进行辨识,以获取综合反映整个油动机特性的油动机开启时间常数TO、油动机关闭时间常数TC。
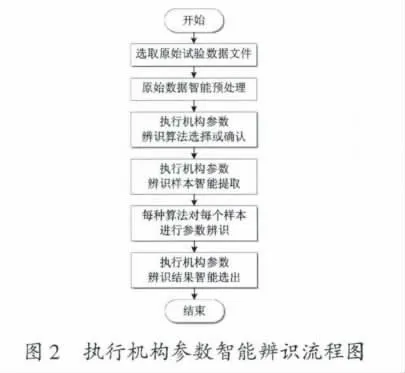
执行机构参数智能辨识如图3 所示。用户选取用于执行机构参数辨识的原始数据文件后,只需勾选软件提供的多项式拟合、最小二乘法、单纯形法、遗传算法、模拟退火法等多种辨识算法中的1种或多种,软件即根据阀位信号的微分数据自动提取每条数据曲线中可能存在的多个参数辨识样本(如图3 中显示的数据曲线包括了3 次阀门开/关的辨识样本),并用每一种勾选的辨识算法分别对每一个辨识样本进行参数辨识,最后通过预设的选优算法选出最终辨识结果TO,TC。

“汽轮机参数辨识”主要是对阀控方式下的频率扰动试验数据进行辨识,以获取汽轮机模型中蒸汽容积时间常数TCH、再热器时间常数TRH、交叉管时间常数TCO。对于高压蒸汽容积环节、再热蒸汽容积环节这种1 阶惯性环节,可以认为从频率阶跃开始,到特征量达到新稳态后变化量的63.2%所需的时间为该容积环节时间常数。考虑到现场测点的布置,可以将调节级压力作为高压蒸汽容积的集中参数,将中压缸进汽压力代表再热器的蒸汽压力〔15〕。而交叉管时间常数可通过对中压缸进汽/排汽压力的变化数据及趋势进行辨识确定。软件辨识界面及流程与执行机构参数辨识相似。
“其他参数辨识”主要提供各缸功率比例、功率过调系数、汽轮机转速惯性时间常数等相对简单的参数辨识和计算功能。如高压缸功率过调系数λ可由式(1)计算得到:

式中 ε 为是进排汽压比,k 为过程绝热系数。
4 智能仿真校核
4.1 建立考虑发电机侧影响的模型
目前国内汽轮机调节系统建模相关的研究,一般都将重点放在参数辨识上,而仿真功能比较粗糙,甚至存在一定程度的失真。其中很重要的一点就是功率在频率扰动下的仿真响应曲线没有实测曲线中常见的过调波峰,而这恰恰是电网稳定计算需要考虑的一个重点指标。《导则》中将阶跃试验中功率快速变化过程达到的最大值减去初始功率的数值定义为高压缸最大出力增量PHP,是最重要的汽轮机调节系统仿真与实测偏差允许值指标之一。
功率响应仿真曲线没有过调波峰的主要原因是因发电机模型和励磁系统模型比较复杂,要建立考虑发电机侧影响的汽轮机调节系统模型非常困难,故大多模型中没有考虑发电机侧相关因素的影响。
为提高仿真曲线的准确度,本文采用发电机降阶模型来代替全阶模型。根据Prony 分析的思想基础,通过输出/输入在扰动作用下的关系,可以从全阶模型中抽取出线性化的低阶模型,从而得到相关的传递函数。在基于参数实测的前提下,考虑励磁系统和PSS 影响的发电机模型可用一个2 阶传递函数表示。如式(2)为某机组发电机的降阶模型:

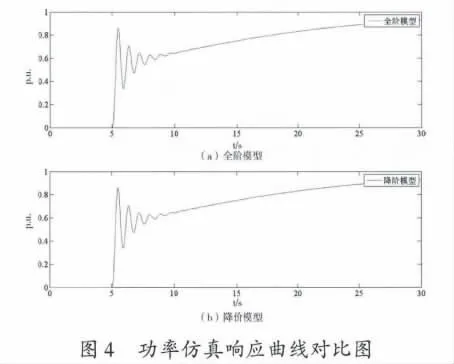
图4 是以该机组辨识所得参数在PSASP 中建立的带全阶发电机的汽轮机调节系统模型和在本软件中建立的降阶模型,分别在同一频率扰动下的功率仿真响应曲线。
图4 表明:在本软件中建立的发电机降阶模型功率仿真响应曲线和全阶模型响应曲线具有几乎完全相同的变化趋势,能很好地仿真出频率阶跃扰动试验中的机组有功功率响应特性。
4.2 仿真校核
根据《导则》要求,仿真校核应包括汽轮机执行机构模型的仿真校核和汽轮机调节系统模型整体仿真校核2 个方面。
汽轮机执行机构模型应在机组静态条件下分别进行开度大阶跃和开度小阶跃扰动仿真校核,且应在负载条件下进行开度小阶跃扰动仿真校核,主要的仿真品质参数是上升时间tup和调节时间ts。
汽轮机调节系统整体模型仿真校核是对调节系统、执行机构、汽轮机等3 个部分的模型及参数辨识结果的整体性仿真校核,其目的是为了确认整个模型与参数是否能够真实反映实际汽轮机特性。应在负载条件下,与汽轮机阀控方式下总阀位指令阶跃试验的功率实测响应曲线,以及闭环方式下频率扰动试验的功率实测响应曲线分别进行仿真校核。主要的仿真品质参数包括汽轮机高压缸最大出力增量PHP、汽轮机高压缸峰值时间THP和调节时间ts。
软件界面上提供了以上4 项仿真校核功能,输入模型参数后,只需选取用于对应校核项目的实测曲线原始数据文件,软件即可自动计算各仿真品质参数的仿真与实测偏差值,并与《导则》要求的允许值进行比较,从而判断辨识得到的模型参数准确度是否合格。
4.3 手自动优化
现有的汽轮机调节系统模型对实际系统进行了简化,有些环节没有考虑;有些环节虽然在模型中有体现,但现有的技术手段无法精确获取这些环节的参数。因此在现场实测、参数辨识过程一切正常的情况下,可能还是会出现仿真品质参数偏差值超过允许值的情况。
针对这种客观情况,参考相关文献〔16〕并根据大量仿真试验结果,对影响仿真品质参数的因素及其影响作用进行了分析,见表2。
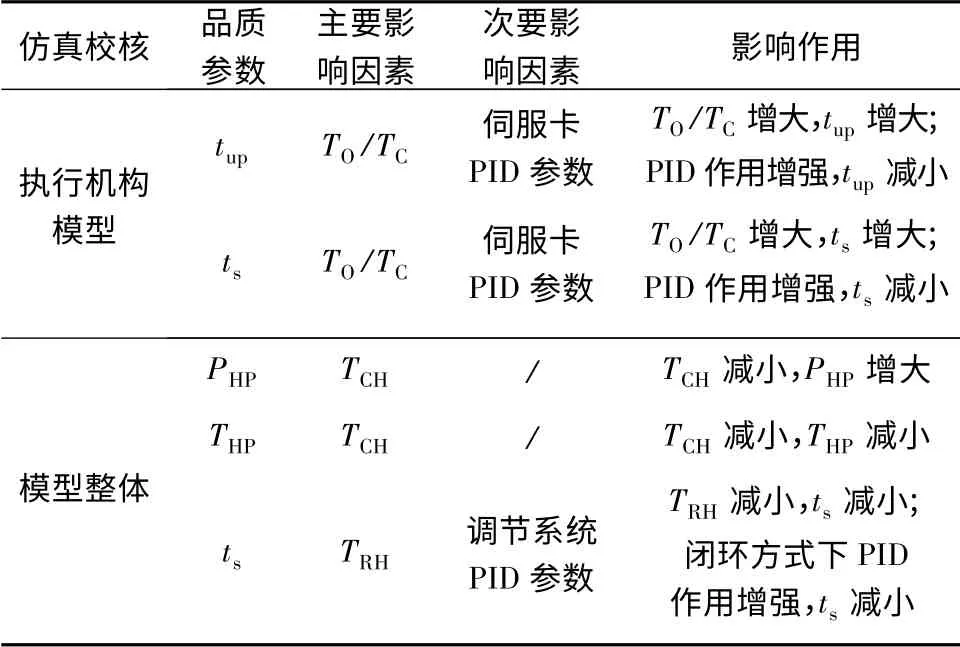
表2 仿真品质参数的影响因素及作用
基于以上分析,本软件提供了仿真品质参数偏差手自动优化功能:软件仿真校核界面上提供仿真曲线、实测曲线、仿真品质参数偏差值和允许值的显示,且以可编辑状态列出模型相关参数。当某仿真品质参数偏差值超过允许值时,用户可根据提示手动调整模型相关参数,再重新进行仿真校核,可方便直观地看出调整后的仿真校核结果;逐步调整直到所有的仿真品质参数偏差合格为止,即为手动优化功能。自动优化功能的原理与手动优化相同。
5 应用实例
用软件对某330 MW 热电机组汽轮机调节系统参数现场实测原始数据进行辨识,主要参数辨识结果见表3。
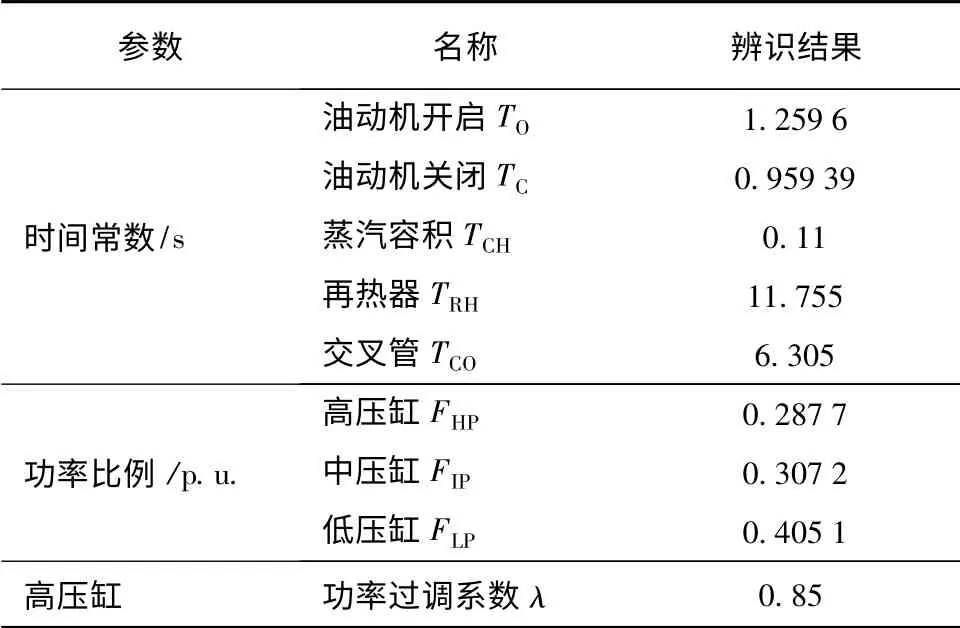
表3 主要参数辨识结果
将该机组的模型参数输入本软件中,进行各项仿真校核,仿真校核结果见表4。

表4 某330 MW 热电机组模型仿真校核结果
从该机组模型的仿真校核结果可以看出,各项仿真品质参数值均在允许值范围内,说明辨识得到的汽轮机调节系统模型参数能够真实反映实际汽轮机的执行机构特性和功率响应特性。
6 结论
文章以Matlab/Simulink 为平台开发了汽轮机调节系统参数,在对现场实测原始数据文件常见格式进行分析的基础上,实现了对汽轮机调节系统参数实测原始数据的自动分析、分配、去噪和标幺等预处理;采用多项式拟合、最小二乘法、单纯形法、遗传算法、模拟退火法等多种先进算法进行参数辨识,并按预设选优算法进行最终辨识结果的选出,实现了模型参数的智能辨识;建立了考虑发电机侧影响的汽轮机调节系统模型,提高了仿真曲线准确度;通过仿真品质参数偏差值的自动计算,实现了对辨识所得模型参数准确度的定量和定性分析;最后对影响仿真品质参数的因素及影响作用进行了分析,实现了仿真品质参数的手自动优化功能。
对实际机组进行参数辨识和仿真校核结果表明,本软件功能上能满足《导则》要求,且参数辨识结果精确,仿真校核准确度高,为根据《导则》开展汽轮机调节系统参数实测、辨识与仿真校核提供了良好平台。
〔1〕竺炜、唐颖杰,谭喜意,等. 发电机调速附加控制对系统频率稳定的作用〔J〕. 电力自动化设备,2008,28 (12):21-24.
〔2〕张仰飞,袁越,陈小虎,等. 汽轮发电机组的调速系统参数辨识〔J〕. 电力自动化设备,2006,26 (12):32-35.
〔3〕李阳海,张才稳,杨涛,等. 基于电网稳定性分析的汽轮机调速系统建模试验研究〔J〕. 汽轮机技术,2011.53 (4):291-294.
〔4〕高伟,李阳海,黄树红,等. 600 MW 汽轮机调速系统试验及辨识研究〔J〕. 汽轮机技术,2006.48 (4):284-286.
〔5〕王官宏,黄兴. 汽轮机调速系统参数对电力系统阻尼特性的影响〔J〕. 电力自动化设备,2011,31 (4):81-90.
〔6〕盛锴. 高压汽室蒸汽容积环节模型参数对再热凝汽式汽轮机调速系统仿真校验的影响〔J〕. 华东电力,2012,40 (11):2 049-2 053.
〔7〕文贤馗,钟晶亮,钱进. 电网低频振荡时汽轮机控制策略研究〔J〕. 中国电机工程学报,2009,29 (26):107-111.
〔8〕宋新立,刘肇旭,李永庄,等. 电力系统稳定计算中火电厂调速系统模型及其应用分析〔J〕. 电网技术,2008,32 (23):44-49.
〔9〕刘辉,田云峰,吴涛. 考虑机组协调控制的汽轮机调速器模型及其应用〔J〕. 电力系统自动化,2008,32 (22):103-107.
〔10〕赵婷,田云峰. 用于电网稳定分析的电液伺服及执行机构数学模型〔J〕. 电力系统自动化,2009,33 (3):98-103.
〔11〕黄青松,徐广文. 水轮机调速系统自定义建模与应用〔J〕.电力系统自动化,2012,36 (16):115-117.
〔12〕刘辉,杨寅平,田云峰,等. 电力系统强迫功率振荡实例及机理分析〔J〕. 电力系统自动化,2012,36 (10):113-117.
〔13〕国家电网公司. Q/GDW 748—2012 同步发电机原动机及其调节系统参数实测与建模导则〔S〕. 北京:中国电力出版社,2012.
〔14〕朱伟民,谷俊杰,刘武林,等. 基于Matlab GUIDE 的汽轮机及调速系统参数辨识数据处理软件〔J〕. 湖南电力,2012,32 (1):13-16.
〔15〕田云峰,郭嘉阳,刘永奇,等. 用于电网稳定性计算的再热凝汽式汽轮机数学模型〔J〕. 电网技术,2007,31 (5):39-44.
〔16〕王颖,王印松,李中华. 300 MW 汽轮机调速系统模型与非线性分析〔J〕. 汽轮机技术,2007,49 (1):17-20.
猜你喜欢
大电机技术(2022年5期)2022-11-17
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
China Report Asean(2022年8期)2022-09-02
物联网技术(2020年12期)2021-01-27
中国交通信息化(2020年12期)2020-02-06
汽车零部件(2017年4期)2017-07-12
水电站机电技术(2014年4期)2014-10-13
导航定位与授时(2014年2期)2014-04-27
河南科技(2014年1期)2014-02-27