方位大失准角的捷联惯导非线性快速对准研究
2013-12-11 07:28魏林生
测绘通报 2013年8期
熊 剑,魏林生,郭 杭,刘 蓉
(1.南昌大学装备与测控教研室,江西南昌330031;2.南昌大学空间科学与技术研究院,江西南昌330031;3.南京航空航天大学,江苏南京210016)
一、引 言
惯性导航在航空、航海、矿山、测绘等领域得到了广泛应用[1]。初始对准是惯性导航中的一项关键技术,其主要目的是获得载体系相对导航系的姿态位置关系,是惯性导航系统工作的前提条件。捷联惯性导航系统的典型对准方法是解析粗对准,其基本原理是利用惯性器件测量重力加速度和地球自转角速度,从而计算出捷联惯导初始姿态矩阵。当三轴失准角都处于小角度范围时,可再通过建立捷联惯导线性误差模型,并利用线性卡尔曼滤波进一步进行捷联惯导的精对准[2-3]。
出于提高对准速度的考虑,需要在大失准角情况下就进行精对准,上述的线性假设条件不能满足。考虑到水平对准精度较高、速度较快,可对水平失准角进行简单计算后便进入精对准,此时水平失准角一般能够满足小角度假设条件,但是方位失准角仍为大角度,这种情况下仍需要建立捷联惯导初始对准的非线性误差方程,采用非线性滤波进行初始对准[4-6]。UKF(unscented Kalman filter)非线性滤波方法基于UT(unscented transformation)变换理论,其滤波精度较高,可作为方位大失准角初始对准的优选方案[7-8]。
本文建立了方位大失准角非线性初始对准滤波模型,分析了基于UT非线性变换的UKF算法原理,推导了方位大失准角情况下增加陀螺信息辅助方位对准的方法,提出了基于UKF非线性滤波方法的方位大失准角非线性快速初始对准方案;最后,通过计算机仿真并验证了方位大失准角非线性快速对准方案的有效性。
二、方位大失准角非线性对准建模
针对方位大失准角初始对准问题进行如下假设:当地地理位置精确已知,忽略位置误差和重力计算误差;不考虑垂直通道的耦合影响;忽略哥氏加速度的影响;将加速度计误差模型近似为常值零偏εb+白噪声wg,陀螺误差模型近似为常值漂移 Δa+白噪声wa。初始对准的导航坐标系为东—北—天地理坐标系。捷联惯导系统的初始状态设置为

式中,δvE为东向速度误差;δvN为北向速度误差;φE、φN、φU为3个失准角。
则初始对准系统模型[9-10]为

式中,G为噪声系数矩阵。非线性向量函数为
f(x)=

取两个水平速度为观测量,则观测方程如下

三、采用UT非线性变换的UKF原理
1.UT非线性变换
Julier等人基于UT非线性变换提出了UKF方法,并用于处理非线性状态估计问题。其核心思想是近似概率分布比近似函数精度更高。假设非线性变换y=f(x),利用UT变换可以得到2n+1个sigma点χi,利用sigma点和权值可求解变量y的统计特性,相应公式如下

y的统计特性可以根据以下公式计算

2.UKF非线性滤波算法
通过UT变换可以比EKF更为准确地求出随机变量非线性变换后的统计特性,结合Kalman滤波递推框架,可以得到UKF非线性滤波器[7-8]。假设非线性系统为加性噪声的情况,设非线性系统为

式中,xk为k时刻系统的n维状态向量;uk为外部输入;yk为m维量测向量;vk为系统过程噪声,且vk~N( 0 ,Rv);nk为量测噪声,且 nk~ Ν (0 ,Rn)。则UKF滤波流程如下:
1)时间更新过程

2)量测更新过程

四、基于UKF非线性滤波的快速对准方法
1.基于UKF的方位大失准角对准方案
相对扩展卡尔曼滤波(extended Kalman filter,EKF)和粒子滤波(particle filter,PF),UKF具以下特点:精度高于EKF方法,略低于PF;计算量略大于EKF,但远远低于PF。对于方位大失准角的初始对准问题,系统非线性特性略为突出,系统噪声特性可以用高斯白噪声得到较好的近似,因此选用UKF非线性滤波方法构成系统初始对准滤波器,如图1所示。

图1 基于UKF的方位大失准角非线性快速对准方案
较多的文献分析并对比了不同非线性滤波算法用于大失准角初始对准的效果,各种非线性滤波算法在方位失准角上的收敛速度表现略有差异。方位失准角收敛速度低的主要原因在于初始对准系统的不完全可观,期望通过采用不同滤波器提高初始对准速度,实际上难以获得实质上的改观。如图1所示,本文在UKF非线性滤波方法的基础上,增加陀螺信息作为新的观测量,并通过陀螺信息辅助方位对准,来提高方位失准角的对准速度。
2.增加陀螺信息的方位大失准角观测方程推导
水平失准角φE、φN为小角度,方位失准角为大角度时,有:cosφE≈1,sin φE≈φE,cosφN≈1,sinφN≈φN。n系通过3次转动可以得到c系[9]

则n系到c系的方向余弦矩阵如下


等效陀螺的常值漂移可以表示为
则方位大失准角情况下等效东向陀螺输出为

取两个水平速度为观测量,并增加等效东向陀螺输出作为新的观测量,则观测方程列写如下

利用式(31)和式(3)可构成增加陀螺信息辅助方位对准的准非线性滤波模型,在此基础上利用UKF非线性滤波方法,可实现方位大失准角情况下的捷联惯导非线性快速对准。
五、仿真与分析
对基于UKF的方位大失准角非线性快速对准方案进行仿真,以验证方案的可行性和对准效果。仿真中陀螺等效精度为0.01°/h,加速度计零偏1 ×10-4g,为便于比较两种方案的对准效果,惯性器件随机常值误差设定为定值:陀螺随机常值取0.01°/h,加速度计随机常值取 1 ×10-4g。初始姿态角为0°、0°、90°(横滚、俯仰和航向)。初始位置为115.9°、28.68°、500 m(经度、纬度和高度)。仿真步长1 s,时间1000 s。
仿真中水平失准角均设置为1°,为了观察不同方位失准角情况下的对准效果,方位失准角初值分别设成 1°、10°、20°和 30°进行仿真(分别称为条件1、2、3和4)。将本文方案与常规UKF滤波进行对比,并在不同方位失准角情况下进行验证,结果如图2~图7所示,其中虚线代表采用常规UKF滤波方案的仿真结果,实线为本文所提出方案的仿真结果。
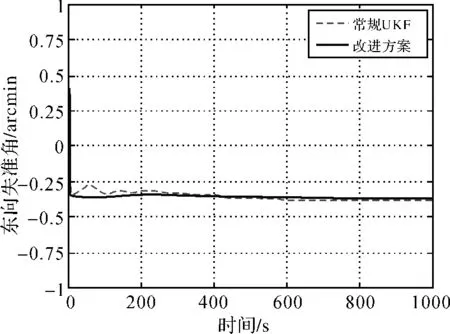
图2 条件1下东向失准角

图3 条件1下北向失准角

图4 条件1下方位失准角

图5 条件2下方位失准角

图6 条件3下方位失准角

图7 条件4下方位失准角
图2~图3为条件1下两种不同对准方案的水平姿态角误差。由于水平失准角的可观测性很高,因此水平姿态角在两种方案中均能快速收敛,其中采用常规UKF方案的水平姿态角误差略有些震荡,但两种方案的水平姿态角对准精度基本是类似的。其他条件下水平姿态角的收敛情况与条件1也基本是类似的,因此本文不再给出相应的仿真结果。
图4~图7分别是在条件1~条件4四种情况下方位角对准的仿真结果。从图中可以看出,在4种条件下改进方案的方位角都能以较高的速度收敛,随着失准角的增大,收敛时间略有增加。图中虚线代表采用常规UKF滤波方案的仿真结果,其方位角的收敛速度明显低于改进方案,其收敛时间均为300 s左右。虽然,两种方案中方位角的最终对准精度都是类似的,但是常规UKF方案中方位角收敛过程波动较大,其对准的性能综合评价要低于改进方案,尤其是在对准速度上,改进方案有着明显的优势。
六、结束语
本文基于UKF非线性滤波方法,分析和推导了方位大失准角的非线性对准模型,并在此基础上提出了基于UKF的方位大失准角非线性快速对准方案,该方案增加陀螺信息作为新的观测量,在保证对准精度的前提下,有效地提高了捷联惯导方位大失准角情况下初始对准的快速性。
[1]石震,杨志强,田永瑞,等.基于高精度基准数据网的陀螺全站仪寻北精度及稳定性评价方法[J].测绘通报,2012(1):91-94.
[2]ZHANG CB,TIAN WF,JIN Z H.A Novel Method Improving the Alignment Accuracy of a Strapdown Inertial Navigation System on a Stationary Base[J].Measurement Science and Technology,2004,15(4):765-769.
[3]WANG X L,SHEN G X.A Fast and Accurate Initial Alignment Method for Strapdown Inertial Navigation System on Stationary Base[J].Journal of Control Theory and Applications,2005,3(2):145-149.
[4]LI X,YU L,BAO K S,XIAO X J.A Novel Nonlinear Filter for Initial Alignment in Strapdown Inertial Navigation System[C]∥2nd International Symposium on Systems and Control in Aerospace and Astronautics.Shenzhen:ISSCAA,2008:1-6.
[5]HAN SL,WANGJL.A Novel Initial Alignment Method for GPS/INSIntegration with Large Initial Heading Error[C]∥22nd International Technical Meeting of the Satellite Division of the Institute of Navigation 2009,ION GNSS 2009.Savannah, Georgia:[s. n.],2009:2832-2842.
[6]ZHAO L,NIE Q,GAO W.A Comparison of Nonlinear Filtering Approaches for In-motion Alignment of SINS[C]∥Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation.Harbin:IEEE,2007:1310-1315.
[7]张卫明,张继惟,范子杰,等.UKF方法在惯性导航系统初始对准中的应用研究[J].系统工程与电子技术,2007,29(4):589-592.
[8]EUN H S,NASER E S.An Unscented Kalman Filter for In-motion Alignment of Low-cost IMUs[C]∥Position Location and Navigation Symposium,2004.[S.l.]:IEEE,2004:273-279.
[9]李东明.捷联式惯导系统初始对准方法研究[D].哈尔滨:哈尔滨工程大学,2006.
[10]马建军,郑志强.基于插值非线性滤波的SINS静基座初始对准[J].系统仿真学报,2007,19(12):2783-2789.
猜你喜欢
测控技术(2018年2期)2018-12-09
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
探测与控制学报(2015年4期)2015-12-15
弹箭与制导学报(2015年1期)2015-03-11