
基于回波信号增长率的目标识别方法
2014-03-05 12:22谭思炜任志良
电波科学学报 2014年3期
谭思炜 任志良
(海军工程大学兵器工程系,湖北 武汉430033)
引 言
连续波探测系统根据其探测方式可分为主动式和被动式.主动探测系统通常利用回波信号的幅值、相位差和多普勒频移等特征对目标进行测距、定位[1-3].但回波信号包络的增长率特征却往往被忽略,以至于很少被利用.被动探测系统接收到的目标信号通常为幅度随距离变化的低频包络.目前对于这种信号常用的识别手段多以信号幅值判断为主[4-5].同样缺乏对目标信号增长率特征的有效利用.因而研究基于回波信号增长率的目标识别方法,将有利于提高连续波探测系统的目标识别能力和抗干扰能力.
模拟电路中常用微分电路对信号的时间变化率进行判断,从而可将有效信号包络与慢变分量分离开来.虽然微分电路对等幅干扰和慢变干扰有着较好的抑制能力,但对脉冲干扰等快变干扰却无能为力.目前专门针对连续波探测系统回波信号增长率提取和识别的研究成果相对较少.基于此,提出一种基于回波信号包络增长率和变化趋势特征的目标信号识别方法,并以海水中主动式连续波电磁探测系统的回波信号为例,研究该方法的原理及主要性能.
1 目标信号特征分析
1.1 目标信号模型
由于受到目标反射面形状复杂性和目标方位随机性的影响,海水中电磁探测系统的目标信号难以用确切的数学公式表示.工程上一般采用理论分析与实际经验相结合的方式给出计算模型.为方便分析,文献[6]将目标信号包络粗略地近似为指数型钟形函数,并给出了反映目标信号包络变化规律的归一化计算公式,如式(1)所示

该式将距离等效到时间轴上,即当t=t0时目标距离最近.式(1)中α为包络形状系数,由目标尺度和相对位置关系决定.α可由经验公式近似表示为

式中:θk为相遇角;VTK为相对速度;h为电磁探测系统的探测距离;Bk为目标反射面的等效宽度.
1.2 包络曲线特征分析
为简化分析,考虑相遇角θk=90°的典型目标信号曲线.对式(1)求一阶导数,可得到目标信号包络曲线f(t)上任意一点的切线斜率,即目标信号包络的瞬时变化率,如式(3)所示,记为f′(t).通常情况下,当目标信号包络幅值达到最大值时,电磁探测系统与目标距离最小.由于接近目标和远离目标两种情况下目标信号呈对称变化,因而只需考虑电磁探测系统接近目标的情况,即目标信号包络曲线的增长部分.目标信号包络及其一、二阶导数曲线如图1所示.

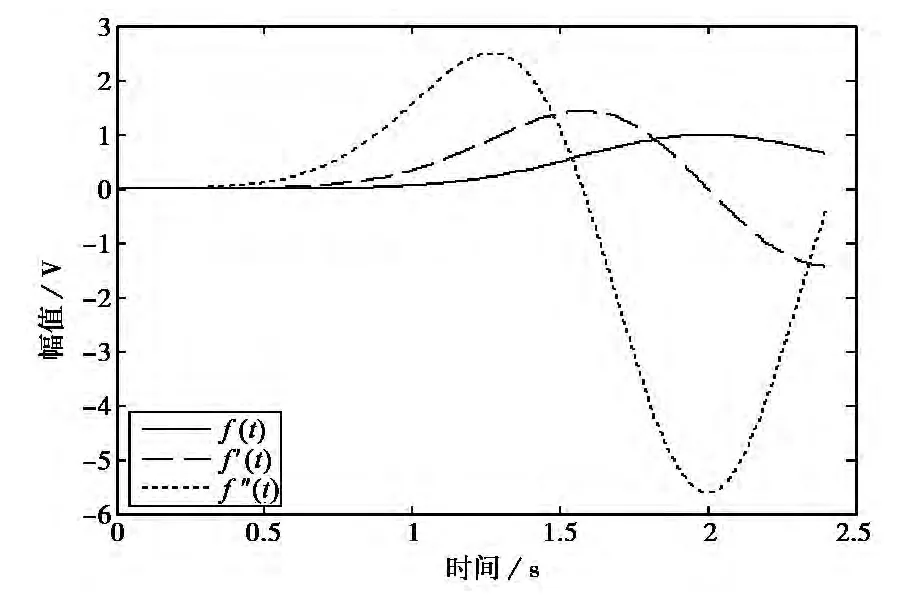
图1 目标信号包络曲线及其一、二阶导数曲线
归一化目标信号包络幅值由0到1变化时,其包络增长率经历了先增加后减小的变化过程.这一变化过程在一阶导数f′(t)曲线上能够得到验证.
f′(t)由0到最大值的过程,是目标信号包络增长率连续增长到最大的过程.这是因为电磁探测系统感应到的电磁场强度随着与目标距离的缩短而指数递增.当距离缩小到一定程度时,包络增长速度将变缓,即f(t)的增长率逐渐减小.通常情况下,目标反射面尺寸远大于电磁探测系统辐射器的尺寸,因而接收天线感应到的场强将趋于最大值,即目标信号包络曲线缓慢趋向最大值[6],f′(t)逐渐减小为0.通过以上分析不难发现,电磁探测系统与目标距离非常接近时,目标信号包络增长率的变化特征为逐渐减小到0.
为进一步考察目标信号包络增长率的变化特征,对式(3)继续求导,得到原始目标信号包络曲线的二阶导数f″(t),如式(4)所示

对比图1中曲线f(t)、f′(t)和f″(t)不难发现:当目标信号包络增长率逐渐增加时,f″(t)的值大于0;反之当目标信号包络增长率逐渐减小,即包络曲线增长变缓时,f″(t)的值小于0.
根据以上分析,将电磁探测系统的连续目标信号的包络变化过程做以下划分,如图2所示.

图2 包络曲线变化过程的划分
第Ⅰ阶段为AB段,可称为目标信号包络幅值的指数上升区.该段上目标信号包络增长率呈指数递增,表明目标刚进入电磁探测系统的探测范围.曲线上B点是目标信号包络幅值增长率的最大值.该点上,目标信号包络曲线的二阶导f″(t)=0.从B点开始,目标信号包络增长率将逐步减小,包络曲线增长变缓,即f″(t)<0.
第Ⅱ阶段为BC段,可称为目标信号包络的线性增长区.从f(t)曲线上看,虽然该段曲线斜率变化不大,但实际上该段目标信号的包络增长率正逐渐减小,f′(t)呈递减趋势,f″(t)<0.
第Ⅲ阶段为CD段,可称为目标信号包络幅值的增长饱和区.从f(t)曲线上不难看出,目标信号包络值正趋于最大,包络增长率f′(t)逐渐趋于0.此时应为距离最小时,接收天线感应到的电磁场强度趋于最大.
综上分析,可利用目标信号包络的一阶导数表示包络的增长率,二阶导数表示包络增长率的变化趋势,从而根据信号包络曲线识别目标信号的不同阶段.
1.3 包络增长率的求解分析
实际应用中,包络曲线是通过接收机等间隔采样回波信号,并从中提取信号幅值得到的.其得到的是一系列能够实时反映目标信号包络变化的离散点.在不考虑采样误差和幅值估计误差的情况下,采用差商法即可从离散点中提取目标信号包络的增长率和变化趋势特征,且实时性好.
然而在工程应用中采样误差和幅值估计误差是客观存在的,主要是因为系统误差和噪声干扰的影响.因而实际得到的目标信号包络曲线是一系列具有一定随机性和跳跃性的离散点,如图3所示.
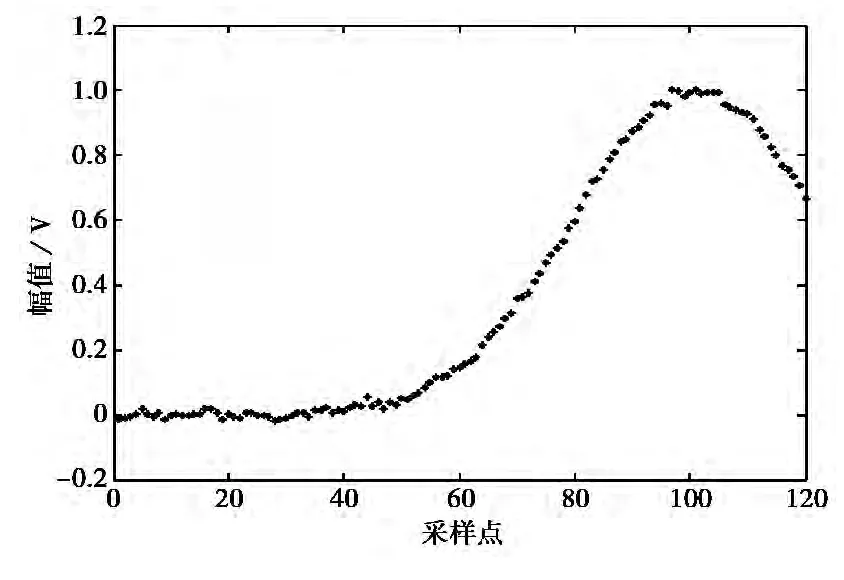
图3 目标信号包络曲线采样
显然,直接利用这些点来计算包络的增长率和变化趋势是非常困难的.这是因为斜率计算对波形的平滑度非常敏感,直接采用差商法计算出的导数误差非常大.
为真实反映目标信号包络增长率和变化趋势,首先采用基于拉格朗日乘数法的多项式拟合算法对采样信号进行平滑处理,然后再做特征解算.
2 特征求解理论分析
2.1 基于拉格朗日乘数法的曲线平滑
为提高拟合算法的实时性,采用滑动数据窗方式对实验数据进行处理.窗口中数据段长度保持不变,数据以先入先出的方式逐位更新.这样既保证了数据处理的实时性,又利用了前后数据的关联性.采用多项式拟合算法对数据曲线进行平滑处理[7-13],数据窗每更新一次,就完成一次多项式拟合,并输出当前窗拟合后第一点数据的校正值,从而实现对目标信号的实时平滑处理.
包络数据可表示为(ni,xi)(1≤i≤N),其中ni为采样时刻,xi为采样数据.数据窗Wi对应的数据区间为[xi,xi+L-1],其中i=1,2,3,…,N-L+1,设数据窗拟合多项式为

式中:整数m≤L-1;ai,k为待定多项式系数.数据窗W1的拟合多项式p1(n)直接采用传统最小二乘多项式拟合得到.
从数据窗Wi(i=2,3,…,N-L+1)开始,为提高曲线拟合的连续性和光滑性,需在进行多项式拟合时添加如下约束条件

式(6)保证了拟合曲线在(ni,xi)处取值的连续性,而式(7)则利用了一阶导数的数学定义保证了拟合曲线在(ni,xi)处的光滑性.
假设

则由式(6)和式(7)可知,多项式拟合的边界条件应为:Hi=0和Ki=0.
令拟合多项式pi(n)对数据窗Wi中ni时刻数据的拟合值与实际采样值之差为Ri,即Ri=pi(ni)-xi,则由此可得到新的拟合方程组为
增加了新的约束条件后,传统最小二乘多项式拟合问题被转化为多个条件限制的多元函数的极值问题[11-12],这一类问题通常采用拉格朗日乘数法求解.为此,引入拉格朗日乘数λ1、λ2,则第i个数据窗的拉格朗日函数可表示为

为使曲线拟合误差最小,即要求拉格朗日函数值Li最小,对式(9)中ai,k和λ1、λ2分别求偏导数,有

式中q=0,1,2,…,m.
令

则由式(10)、(11)可分别求出待定多项式系数ai,k(k=0,1,2,…,m)以及拉格朗日乘数λ1、λ2的值,从而确定数据窗Wi(i=2,3,…,N-L+1)的拟合多项式pi(n),并最终确定数据点(ni,xi)的拟合值(ni,pi(ni)).以此类推,数据窗每向前滑动一位,即输出数据队列中第一位数据的拟合值,从而依次实现目标曲线的拟合.
2.2 差商法计算离散点导数
拟合后数据点的校正值为(ni,pi(ni)),则可用其一阶差商和二阶差商来分别表示曲线的一阶导数和二阶导数

2.3 特征识别
目标信号的特征识别方法示意图如图4所示.

图4 特征识别方法示意图
其中,d1(B)、d1(C)的值可由实验测得的典型值确定.数据窗每完成一次数据更新便执行一次以上判别方法,以实现对当前信号特征的及时提取.
3 实验结果及分析
实验室条件下,在深5m、宽5m、长7m的水池中,模拟海水中电磁探测系统通过目标时的工作过程.水池中用盐水模拟海水环境,测得导电率约为7.7Ωm.以长2m、宽2m、厚2cm的钢板模拟目标反射界面,并用缆绳固定置于水池中.通过上方的滑动导轨,来带动滑轨2下方1.5m的电磁探测系统,以平行于钢板平面的方向做直线运动来模拟探测过程.电磁探测系统与钢板距离取1.2m,如图5所示.从回波信号中提取到的目标信号包络如图3所示.

图5 实验示意图
首先以实验测得的目标信号包络曲线为研究对象,并将采用本文算法得到的计算结果与采用文献[13]中算法得到的结果进行对比.考虑到算法的实时性和拟合效果,折中选取两种算法的数据窗长度均为L=5.文献[13]中算法采用线性插值,取判据SD=0.1.
3.1 包络曲线平滑
如图6(a)所示,本文所采用的拟合法由于在拟合过程中增加了连续、平滑两个约束条件,因而对解算得到的实际目标信号包络中的随机跳动起到了有效的平滑作用,平滑效果比较理想,为随后的连续增长率计算提供了有利条件.图6(b)所示的是文献[13]中算法的拟合结果.可见文献[13]算法对实验数据的拟合效果也比较明显,但在目标信号包络幅值较小的区域仍有明显的幅值起伏.
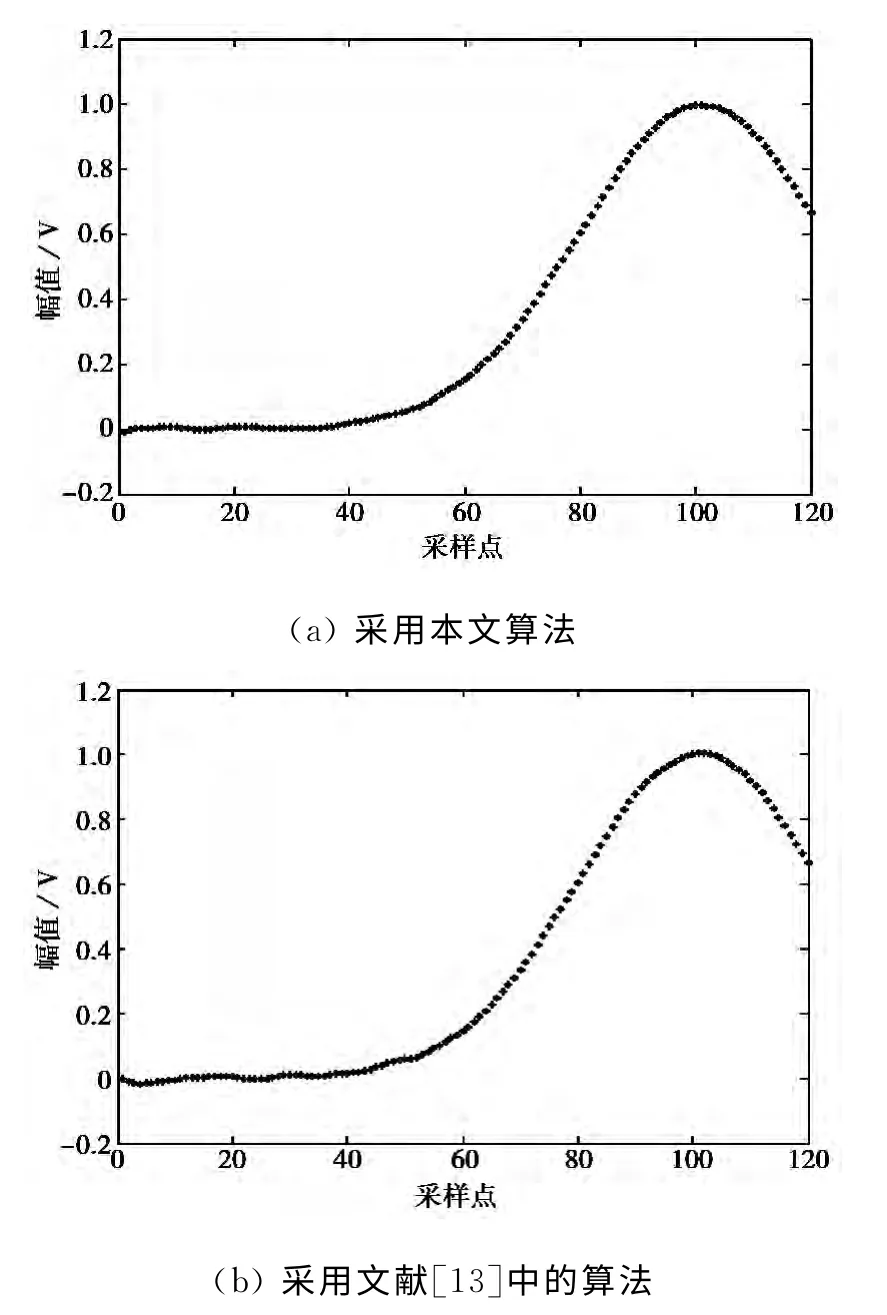
图6 曲线拟合结果
3.2 包络增长率计算
采用差商法对经以上两种算法平滑处理后的数据进行运算,所得到包络增长率如图7所示.对比两图不难发现,本文采用的平滑算法求得的目标信号包络增长率的变化规律与理论值较为接近,但仍有明显的跳动.而文献[13]中的算法求得的目标信号包络增长率与理论值相比显得误差更为明显,但能大致反映出包络增长率的变化规律.这也进一步说明了离散点斜率计算对采样曲线平滑度非常敏感.
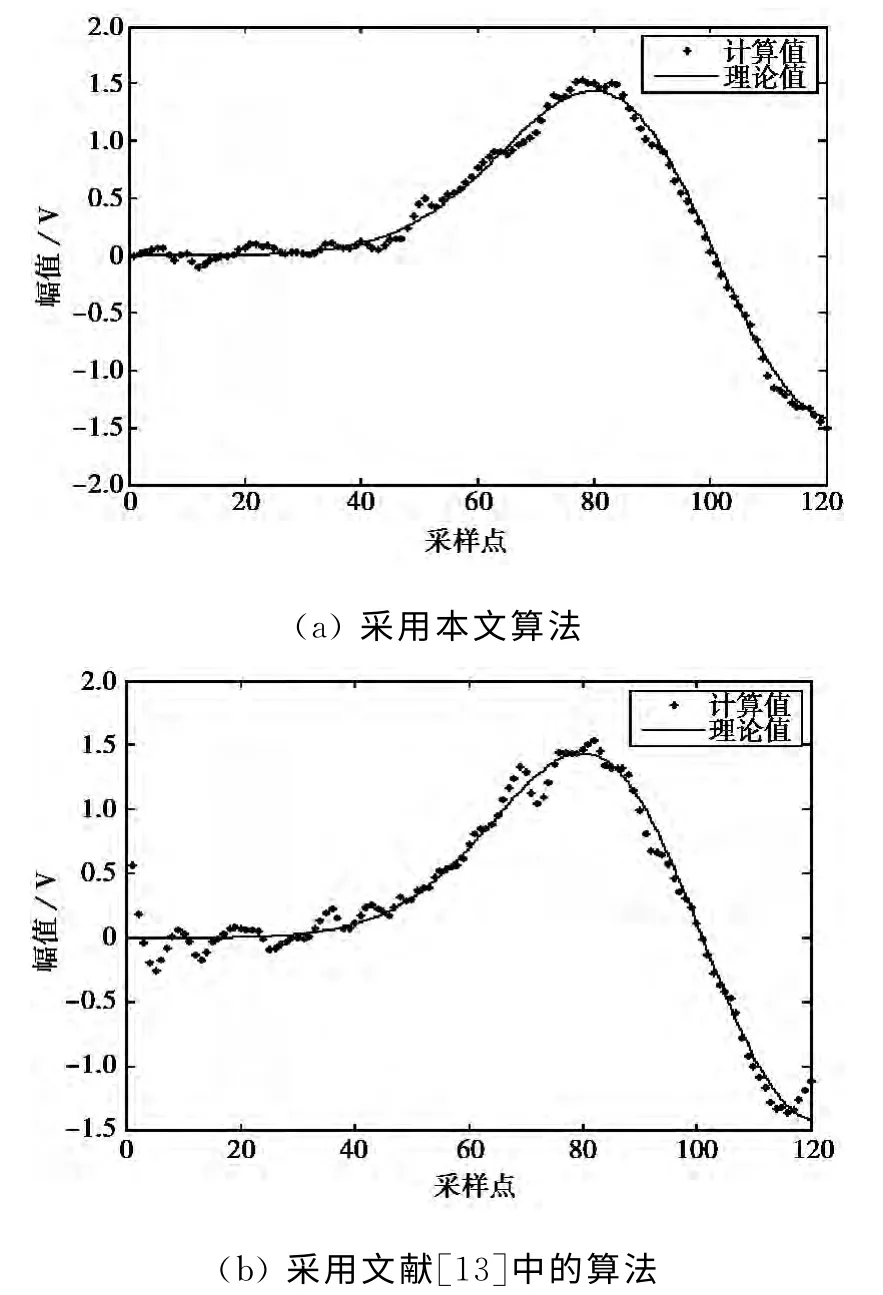
图7 包络增长率计算结果
3.3 增长率变化趋势判断
首先对解算后的包络曲线增长率做进一步处理——剔除增长率中误差明显较大的点,然后对处理后的包络增长率变化趋势进行判断.判断标准为:包络增长率递增,则变化趋势判断结果置1,否则判断结果置0.不同条件下的判断结果如图8所示.
图8(a)为理论上包络曲线增长率变化趋势的判断结果,图8(b)为采用本文算法得到的判断结果,图8(c)为采用文献[13]中算法得到的判断结果.显然图8(b)的判断结果相比图8(c)更为接近理论值.
3.4 识别率计算

图8 变化趋势判断结果

表1 两种算法的识别率对比
由表1不难看出,本文提出的目标信号特征识别方法的区间识别率均达到了80%以上,略高于文献[13]中算法的计算结果.其中,本文算法对增长饱和区的识别率最高,而对线性增长区的识别率最低.这是因为算法对线性增长区的识别主要依赖于对包络增长率的计算准确度.而增长率的计算准确度却受到波形平滑程度的直接影响,因而目标信号包络的平滑度对特征的识别率影响较大.
4 结 论
提出了一种基于回波信号包络增长率和变化趋势特征的目标信号识别方法.该方法根据包络增长率和变化趋势的不同将目标信号包络曲线划分为指数上升、线性增长和增长饱和三个阶段.并利用基于拉格朗日乘数法的滑动数据窗多项式拟合算法与差商法联合求解出包络曲线增长率和变化趋势特征.算例表明,该方法对目标信号包络曲线三个部分的识别率分别达到88.2%、82.7%和91.3%,因而能够实现对回波目标信号的有效识别.
本文所设计的目标识别方法可广泛应用于水下近场电磁探测系统的目标识别、连续波雷达探测以及计算机图形识别等领域,为提高目标信号的特征识别能力和抗干扰性能提供了参考.
[1]郭琨毅,张永丽,盛新庆,等.基于欠定盲分离的多目标微多普勒特征提取[J].电波科学学报,2012,27(4):691-695+759.GUO Kunyi,ZHANG Yongli,SHENG Xinqing,et al.An approach for extracting independent micro-Doppler characteristics of multiple targets based on underdetermined blind source separation[J].Chinese Journal of Radio Science,2012,27(4):691-695+759.(in Chinese)
[2]侯 志,缪 晨,张金栋,等.复杂探测背景下的LFMCW雷达目标二维检测方法[J].西安电子科技大学学报:自然科学版,2011,38(4):167-172.HOU Zhi,MIAO Chen,ZHANG Jindong,et al.Moving target detection and processing method of LFMCW radar under complex background[J].Journal of Xidian University:Science and Technology,2011,38(4):167-172.(in Chinese)
[3]刘贵喜,凌文杰,杨万海.线性调频连续波雷达多目标分辨率的新方法[J].电波科学学报,2006,21(1):79-83.LIU Guixi,LING Wenjie,YANG Wanhai.Novel method to multitarget resolution for linear frequencymodulated continues wave radar[J].Chinese Journal of Radio Science,2006,21(1):79-83.(in Chinese)
[4]YU Bo,LIU Yanchun,ZHAI Guojun,et al.Magnetic detection method for seabed cable in marine engineering surveying[J].Geo-spatial Information Science,2007,10(3):186-190.
[5]王 静,黄建国,张群飞,等.噪声空间谱预白化小孔径阵列被动目标检测方法[J].西北工业大学学报,2012,30(3):422-427.WANG Jing,HUANG Jianguo,ZHANG Qunfei,et al.An effective noise spatial spectrum pre-whiten approach in passive detection using small aperture array[J].Journal of Northwestern Polytechnical,2012,30(3):422-427.(in Chinese)
[6]王绍卿,刘健民.鱼雷近炸引信原理与设计[M].西安:西北工业大学出版社,1992.
[7]CHENG Lerong,XIONG Jinjun,HE Lei.Non-Gaussian statistical timing analysis using second-order polynomial fitting[J].IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems,2009,28(1):130-140.
[8]PANG Xufang,SONG Zhan.Detecting and classifying umblic points from polynomial fitting point cloud[C]//2011IEEE International Computational Conference on Science and Engineering.Dalian,August 24-26,2011:155-160.
[9]WANG Y,WANG D S,BRACKSTEIN A M.On variational curve smoothing and reconstruction[J].Journal of Mathematical Imaging and Vision,2010,37(3):183-203.
[10]AZAR R Z,GOKSEL O,SALCUDEAN S E.Subsample displacement estimation from digitized ultrasound RF signals using multi-dimensional polynomial fitting of the cross-correlation function[J].IEEE Transactions on Ultrasonics,Ferroelectrics and Frequency Control,2010,57(11):2403-2420.
[11]王 可,唐忠辉,孙兴伟.一种点云数据曲线光顺处理算法[J].组合机床与自动化加工技术,2013,(2):64-66+69.WANG Ke,TANG Zhonghui,SUN Xingwei.A curve fairing processing algorithms of point cloud data[J].Modular Machine Tool &Automatic Manufacturing Technique,2013,(2):64-66+69.(in Chinese)
[12]张 勇,林 皋,胡志强,等.等几何分析方法求解静电场非齐次边值问题[J].电波科学学报,2012,27(5):997-1004.ZHANG Yong,LIN Gao,HU Zhiqiang,et al.Isogeometric analysis for electrostatic problem with inhomogeneous boundary conditions[J].Chinese Journal of Radio Science,2012,27(5):997-1004.(in Chinese)
[13]王玉诏,张寅超,陈思颖,等.用于激光雷达回波平滑的半步长插值迭代法[J].北京理工大学学报,2011,31(12):1424-1427.WANG Yuzhao,ZHANG Yinchao,CHEN Siying,et al.Half-step interpolation iteration method for smoothing echo from atmosphere lidar[J].Transactions of Beijing Institute of Technology,2011,31(12):1424-1427.(in Chinese)
猜你喜欢
河北金融年鉴(2021年0期)2021-08-25
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
河北金融年鉴(2020年0期)2021-01-21
民用飞机设计与研究(2019年4期)2019-05-21
成都信息工程大学学报(2018年4期)2019-01-23
电子制作(2018年23期)2018-12-26
传感器与微系统(2018年7期)2018-08-29
中国财政年鉴(2017年0期)2017-07-04
数学大世界·中旬刊(2017年3期)2017-05-14
中国财政年鉴(2016年0期)2016-06-05
